

1.4 Магнитные подвесы
Состояние, при котором твердое тело "парит" в силовом поле подвеса без какого-либо механического контакта с окружающими телами, называется левитацией. Бесконтактный подвес радикально решает проблему трения и позволяет создавать "вечные" подшипники, которые не будут претерпевать износа во все время эксплуатации.
Теорема ИРНШОУ – запрещает существование устойчивого равновесия электрических зарядов под действием одних только электрических сил. Физический смысл этой теоремы в следующем: разноименные заряды притягиваются со все возрастающей силой вплоть до взаимной нейтрализации или уничтожения, одноименные же отталкиваются вплоть до удаления в бесконечность.
Электрические и магнитные подвесы, в зависимости от принципа действия, принято разбивать на девять типов:
– электростатические;
– на постоянных магнитах;
– активные магнитные;
– LC- резонансные; индукционные;
– индукционные;
– кондукционные;
– диамагнитные;
– сверхпроводящие;
– магнитогидродинамические.
|
Рис. 1.31 Принципиальная схема управления типичной системы на основе активного магнитного подшипника |
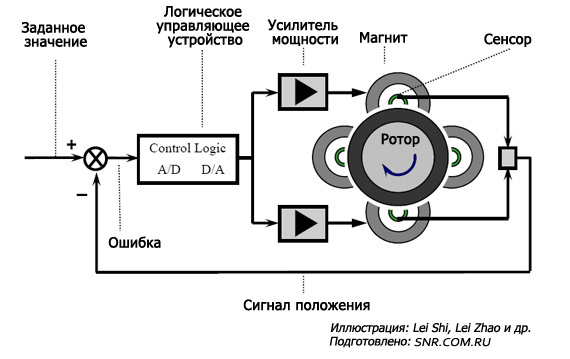
Суть работы активного магнитного подвеса сводится к следующему. Датчик (сенсор) измеряет смещение подвешиваемого ферромагнитного тела (ротора) из заданного положения равновесия. Сигнал измерения обрабатывается логическим устройством. Усилитель мощности, питаемый от внешнего источника электроэнергии, преобразует этот сигнал в управляющий ток, в обмотке электромагнита который вызывает силу магнитного притяжения таким образом, что нарушенное положение равновесия восстанавливается. Устойчивость подвеса, также как и необходимые жесткость и демпфирование, достигаются соответствующим выбором закона управления.
Полный неконтактный подвес ротора может быть осуществлен с помощью либо двух радиальных и одного осевого АМП, либо двух конических АМП. Поэтому система активного магнитного подвеса ротора включает в себя как сами подшипники, встроенные в корпус машины, так и электронный блок управления, соединенный проводами с обмотками электромагнитов и датчиками. В системе управления может использоваться как аналоговая, так и цифровая обработка сигналов.
Достоинствами АМП являются:
относительно высокая грузоподъемность;
высокая механическая прочность;
возможность осуществления устойчивой неконтактной подвески тела;
возможность изменения жесткости и демпфирования в широких пределах;
возможность использования при высоких скоростях вращения, в вакууме, высоких и низких температурах, стерильных технологиях
Недостатками АМП являются:
– сложная и дорогостоящая аппаратура управления
– внешний источник электроэнергии, что снижает эффективность и надежность всей системы.
Тема 2. Упругие элементы (оболочковые)
В процессе эксплуатации прибора есть группа деталей, деформация которых используются в работе прибора. Такие детали называют упругими элементами (пружинами).
Упругие элементы по основным геометрическим признакам можно подразделить:
– на стержневые упругие элементы, изготовляемые из проволоки или лент (воспринимают сосредоточенные силы и моменты);
– упругие элементы в виде пластин и оболочек, которые выполняют из листового материала или трубок (обычно нагружаются гидростатическим давлением).
Упругие элементы в виде оболочек, реагирующих на изменение давления, называются манометрическими. К ним относятся мембраны, сильфоны и трубчатые пружины.
Мембраны представляют собой гибкие пластины, прогибы которых определяются величинами действующих давлений.
Сильфоны – гофрированные трубки, способные под нагрузкой получать большие осевые или угловые перемещения.
Манометрические трубчатые пружины представляют собой тонкостенные кривые трубки, под действием давления пружины разгибаются.