

Тема 5. Успокоители (демпферы)
Успокоители служат для устранения вредных собственных колебаний подвижной системы прибора. Колебания могут быть вызваны ударами, вибрациями, ускорениями. Они могут возникнуть при резком изменении измеряемой величины. Эти колебания приводят к искажению показаний приборов, затрудняют эксплуатацию, могут вообще вывести прибор из строя.
|
Рис. 5.1 Характеристики демпферов |
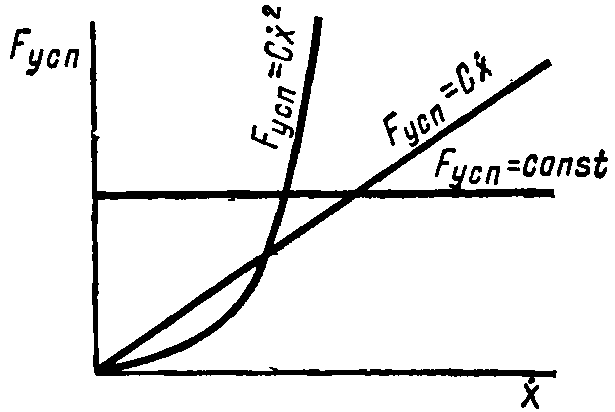
Fycn= const;
Fycn = сх, – линейный успокоитель;
Fycn = сх2 – квадратичный успокоитель.
где: c – коэффициент характеризующий вид системы;
х – ускорение.
Наиболее распространенными являются успокоители с линейной характеристикой сопротивления. К ним относятся: воздушные, жидкостные и магнитоиндукционные успокоители.
Воздушные успокоители. По конструктивному исполнению различают поршневые (рис 3,а, б) и камерные (рис 3, в) демпферы. В качестве «рабочей среды» в воздушных успокоителях выступает воздух, вязкость которого почти не зависит от его температуры.
|
|
а) |
б) |
Рис. 5.2 Воздушные демпферы |
|
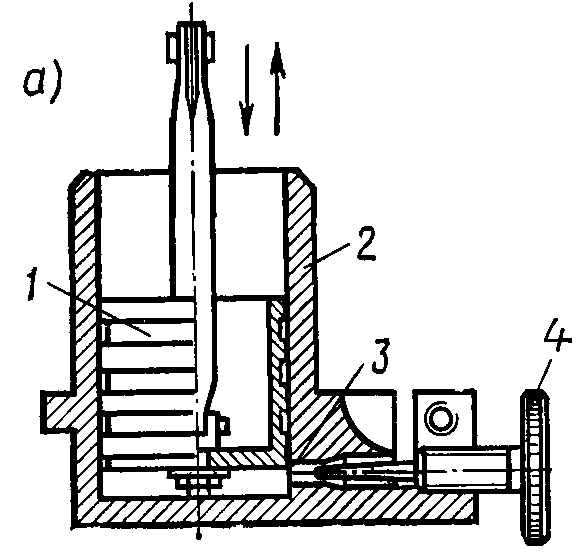
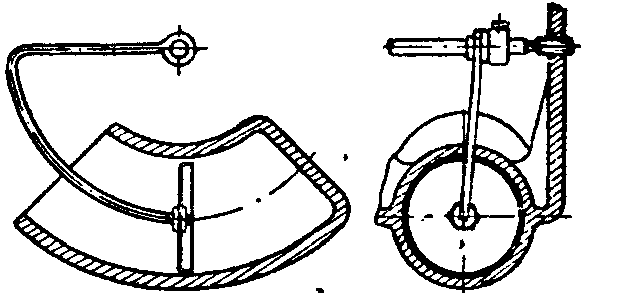
Сопротивление движению создается при проталкивании поршнем 1 воздуха через отверстие 3 малого диаметра (рис 5.2 а) или через зазор меду стенками цилиндра 2 и поршня 1 (рис 5.2 б). Регулировку сопротивления движению можно осуществлять как закручиванием (выкручиванием) винта, так и изменения площади отверстия выполненного в крыле.
К достоинствам воздушного успокоителя можно отнести:
– простота конструкции, надежность, удобство в эксплуатации;
– коэффициент успокоения почти не зависит от изменения температуры окружающей среды.
Недостатки:
– сжимаемость воздуха ведет к нарушению режима работы успокоителя;
– изменение давления воздуха на разных высотах от уровня моря.
|
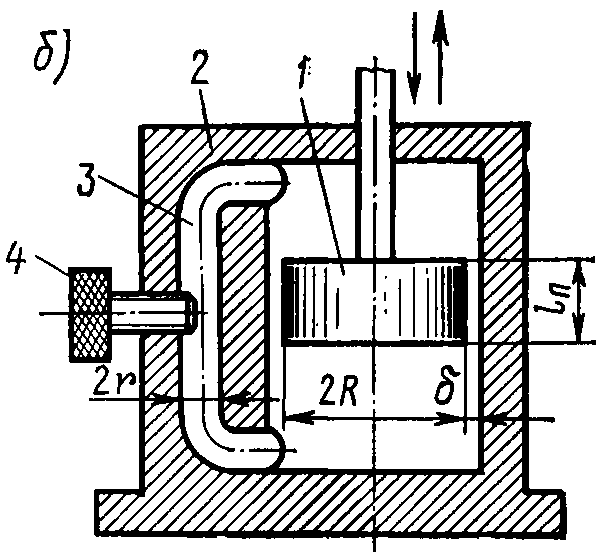
Рис. 5.3 Жидкостной демпфер поршневого типа |
Преимуществом жидкостных успокоителей является возможность получения практически любого коэффициента затухания.
Однако они имеют и недостатки:
– сложность конструкции, обеспечение герметичности демпфера;
–зависимость вязкости жидкости от изменения температуры.
|
Рис. 5.4 Магнитоиндукционный демпфер |
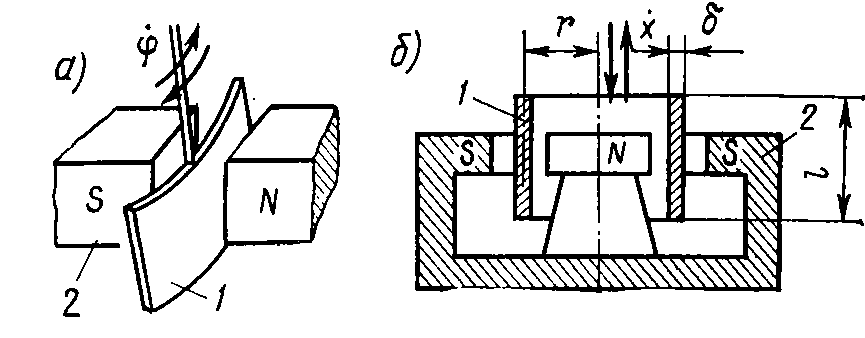
Достоинства:
надежность работы;
коэффициент затухания не зависит от изменений температуры.
можно регулировать коэффициент затухания, установив электромагниты и изменять величину тока питания;
возможность создания большого успокоения.
Недостатки:
– их относительно большие габариты и масса из-за необходимости применения магнитов с большой индукцией в зазоре;
– воздействие магнитных полей на измерительные элементы прибора.
|
Рис. 5.5 Фрикционный демпфер |
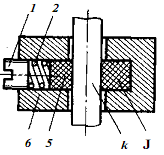
Ввиду сложности расчета таких типов устройств подбор коэффициентов ускорения в переходных процессах осуществляется эмпирическим путем в процессе настройки.