

1.1.5 Устройства для регулировки направляющих
При изготовлении деталей направляющих неизбежны погрешности размеров, формы, расположения поверхностей. В следствии этого при сборке появляются люфты снижающие точность перемещения или увеличивающие усилие перемещения «натяги» и износ. Поэтому, для создания работоспособной конструкции используются регулировочные устройства.
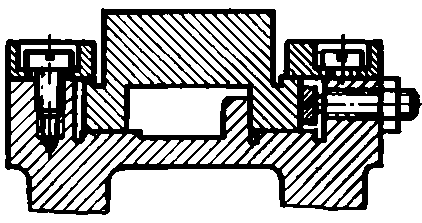
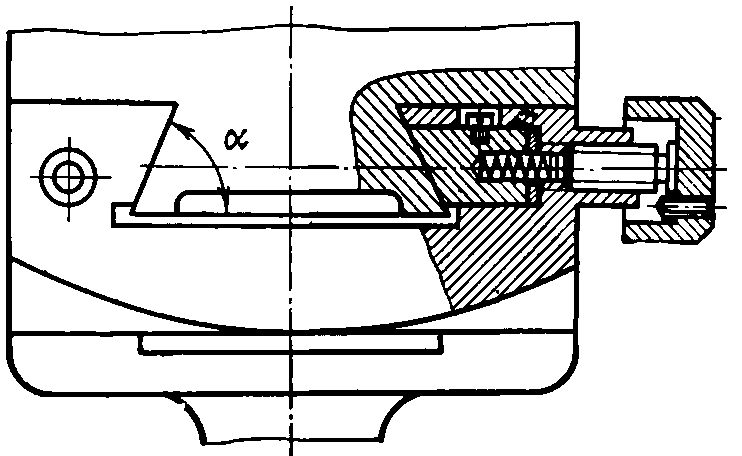
На рисунке 1.20 а показана выборка зазора в направляющих путем завинчивания регулировочного винта. На рисунке 1.20 б показана конструкция с силовой пружиной выбирающей зазор.
а) б)
Рис. 1.20 Способы регулировки зазора в направляющих.
1.1.6 Трение в направляющих
При конструировании направляющих производится расчет сил сопротивления движению ползуна. Это необходимо для:
а) расчета требуемого усилия пружины, осуществляющей силовое замыкание с приводом направляющей;
б) расчета приведенного момента на валу ручного или электромеханического привода;
в) обеспечения плавности движения и отсутствия силового заклинивания.
При отсутствии действия внешних сил сопротивление движению ползуна в направляющей характеризуется силой трения Q, возникающей под действием массы ползуна S1 и располагаемого на нем груза S2. Для приведения в движение ползуна необходимо приложить внешнюю силу R, которая должна быть больше силы трения Q. При расчете силы R можно составить две схемы:
– точка приложения силы расположена в средней плоскости направляющей под некоторым углом α к этой плоскости (рис. 1.21 а);
– точка приложения и сама сила находятся в параллельной плоскости, отстоящей от средней на длину l (рис. 1.21 б).
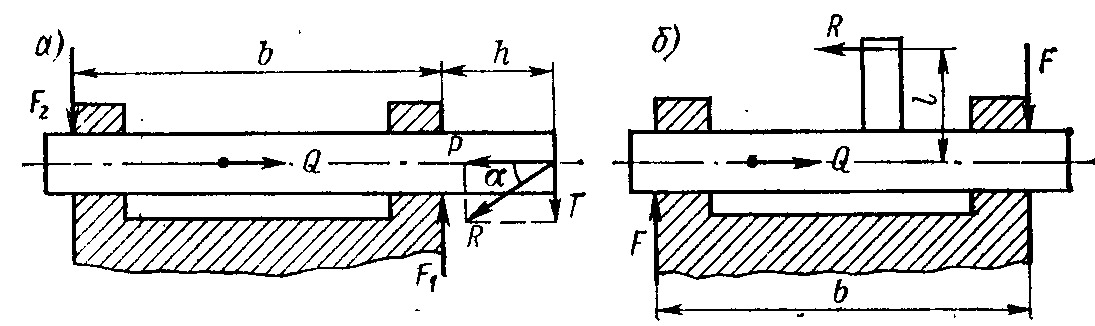
Рис. 1.21 Схема действия сил на направляющую
В случае, когда внешняя сила R не способна привести ползун в движение, говорят о силовом заклинивании. Следует различать также температурное заклинивание, которое получается при больших перепадах температур, при неправильно выбранных материалах деталей и вида посадки сопрягаемых поверхностей.
Условие отсутствия силового заклинивания для первой расчетной схемы выглядит следующим образом:

Из формулы видно, что наличие или отсутствие заклинивания не зависит от значения силы R, а определяется только конструктивными параметрами – базой b, плечом h и углом действия силы α.
Во второй расчетной схеме,
сила R
создает опрокидывающий
момент
 ,
уравновешивающийся
моментом пары сил реакции в опорах, т.
е.
,
уравновешивающийся
моментом пары сил реакции в опорах, т.
е.
 .
Реакция опор создает
силу трения в направляющих:
.
Реакция опор создает
силу трения в направляющих:
Условие отсутствия
заклинивания R>Q
можно выразить через конструктивные
параметры
 .
.
1.1.7 Температурное заклинивание
Для приборов, работающих при значительных колебаниях температуры окружающей среды, следует производить расчеты на возможность температурного заклинивания при неправильном выборе посадки сопрягаемых поверхностей и их материала: Расчет ведется по следующей формуле:

ΔС0 – зазор при нормальных условиях работы направляющей;
α1 и α2 – коэффициенты линейного расширения направляющей и втулки
D – диаметр направляющей;
Δt – изменение температуры
1.1.8 Износ направляющих
Износ направляющих зависит от удельного давления контактирующих пар деталей, коэффициента трения материалов, их твердости и качества обработки, а также от свойств смазочных материалов, заполняющих зазор в направляющих.
Проверка удельного давления производится по формуле:
q = N/S < [q]
где N – нормальное давление;
S – площадь контакта сопрягаемых пар деталей;
[q] –допускаемое удельное давление.