

Ф едеральное
бюджетное государственное образовательное
едеральное
бюджетное государственное образовательное
учреждение высшего профессионального образования
«Ростовский государственный
университет путей сообщения»
(ВБГОУ ВПО РГУПС)
Кафедра «Основы проектирования машин»
АНАЛИЗ МЕХАНИЗМА И РАСЧЕТ РЕДУКТОРА
Пояснительная записка к курсовой работе по дисциплине
«Прикладная механика»
ПМ 204.16.06 ПЗ

 Работа защищена
с оценкой
Работа защищена
с оценкой
Руководитель работы Рассохин Г.И.
Студент группы
ЭМ-2-204 Шагров В.В.
2012
 ВВЕДЕНИЕ
ВВЕДЕНИЕ
Настоящая курсовая работа выполняется на основе знаний, полученных при изучении дисциплин общенаучного цикла специальности 140601 Электромеханика. Поэтому целью проектирования является освоение первых инженерных навыков по анализу механизмов, расчету и конструированию типовых деталей и узлов машин.
Общими задачами курсового проектирования являются:
- ознакомление с технической литературой по теме курсовой работы и методикой проектирования;
- изучение известных конструкций механизмов, их узлов и деталей – аналогов тем, которые указаны в задании на проектирование;
- выполнение необходимых расчетов для обеспечения заданных технических характеристик проектируемого устройства;
- выбор материалов, обеспечивающих необходимые прочностные показатели и срок эксплуатации проектируемого устройства;
- выполнение графической части курсового проекта в соответствии с требованиями стандартов.
Настоящая работа выполняется на примере кривошипно-ползунного механизма и электромеханического привода к ленточному конвейеру, включающего электродвигатель, муфту упругую, редуктор червячный, передачу цепную открытую, вал приводного барабана. В связи с этим конкретными задачами проектирования являются:
- кинематический анализ кривошипно-ползунного механизма;
- энергокинематический расчет по прогнозированию необходимых скоростных и силовых параметров электродвигателя, муфты упругой, редуктора червячного, передачи цепной открытой, вала приводного барабана конструктивной схемы привода;
- аргументированный подбор оптимального электродвигателя, соответствующего минимальной энергоемкости привода и обеспечивающего заданные скоростные параметры ленточного конвейера.
- обоснование геометрических параметров элементов цепной открытой передачи движения с помощью инженерных методик, оперирующих прочностными показателями выбранных материалов;
- разработка чертежа общего вида червячного одноступенчатого редуктора в соответствие с ранее проведенными расчетами геометрических параметров и компоновкой конструктивных элементов.
Содержание.
Введение…………………………………………………………………………..4
1. Кинематический анализ кривошипно – ползунного механизма.
1.1. Определение геометрических параметров кинематической схемы..............................................................................................................................5
1.2. Определение масштабных коэффициентов...................................................6
1.3. Построение плана скоростей…………………………………...…………....7
1.4. Построение плана ускорений……..................................................................8
2. Расчет и проектирование червячного одноступенчатого редуктора.
2.1. Энергокинематический расчет привода…………………………………...9
2.2. Расчет червячной передачи………………..……………………………….16
2.3. Предварительный расчет валов…..………………………………………..22
2.4. Расчет червячных пар……..………………………………………………..24
2.5. Расчет размеров корпуса и крышки редуктора…………………………...27
2.6. Компановка редуктора……………………………………………………..28
Заключение...…………………………………………………………………….31
Список использованных источников..………………………………………..32
Приложения: 1) результаты кинематического анализа
2) редуктор червячный
1. Кинематический анализ кривошипно-ползунного механизма
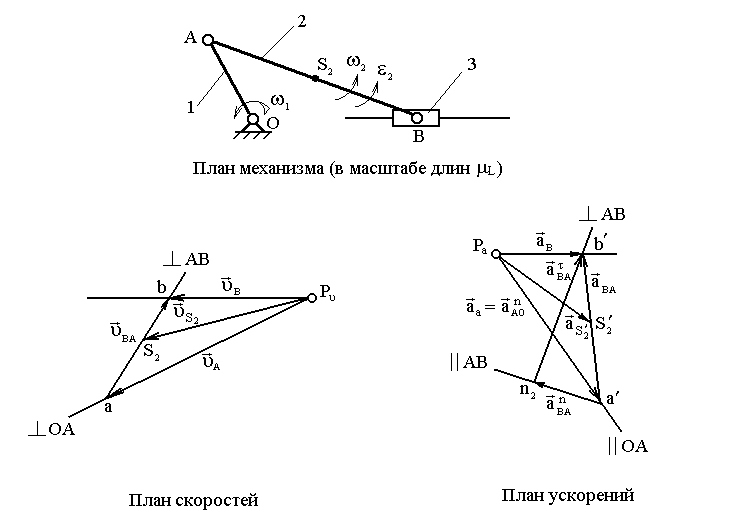
Схема кривошипно-ползунного механизма
1 – кривошип
2 – шатун
3 – ползун
S2 – центра тяжести шатуна
ω1 - угловая скорость вращения кривошипа
ω2 - угловая скорость шатуна
ε2 – угловое ускорение шатуна
Во всех случаях угловая скорость вращения кривошипа ω1 = 8 м/с.
Центр тяжести S2 шатуна находится в средине его длины.
Направление вращения звена ОА против часовой стрелки.
 1.1
Для вычерчивания схемы механизма ее
масштаб равен:
1.1
Для вычерчивания схемы механизма ее
масштаб равен:
![]() = L
/ l
= 1,4/190 = 0,007
= L
/ l
= 1,4/190 = 0,007
![]() ,
,
где L - максимальный габаритный размер кривошипно-ползунного механизма:
L=2L1 + L2 = 0,4*2 +0,6 = 1,4 м,
L1 – длина кривошипа, м; L2 – длина шатуна, м. Эти размеры приведены в задании.
l, мм - горизонтальный габаритный размер схемы на листе чертежа, выбирается произвольно.
1.2 Длины звеньев механизма на чертеже:
- длина кривошипа: l1 = L1 / = 0,6/0,007 = 85,71 мм;
- длина шатуна: l2 = L2 / = 0,2/0,007 = 28,57 мм.
1.3 Линейная скорость точки А (шарнира кривошип – шатун):
VA = ω1 · L1 =8*56 = 44,8 м/с,
где ω1 – угловая скорость вращения кривошипа ω1 = 8 м/с.
1.4 Произвольно определим местоположение полюса PV плана скоростей механизма на чертеже и примем решение о длине вектора (PVa), мм, абсолютной скорости точки А на этом плане.
1.5 Масштаб плана скоростей:
![]() ,
,
где (PVa), мм, абсолютная скорость точки А.
1.6 Построим план скоростей в следующей последовательности:
- начертим вектор (PVa), мм, перпендикулярно звену ОА механизма. Направление этого вектора соответствует направлению вращения звена ОА;
- из полюса PV проведем линию параллельно траектории движения точки В;
из точки а на плане скоростей проведем линию перпендикулярно звену АВ механизма. На пересечении этих линий получим точку б.
- проставить направление вектора аб относительной скорости точки Б.
Он должен быть направлен из точки а в точку в;
- в средине вектора ав нанести точку S2 центра тяжести звена АВ и провести линию вектора (PV S2) абсолютной скорости этой точки.
1.7 Измерим длины векторов скоростей:
PVв – вектора абсолютной скорости точки В, мм;
ав - вектора скорости точки В относительно точки А, мм.
1.8 Абсолютная скорость точки В:
![]() = 81*4,48 = 362,88 м/с;
= 81*4,48 = 362,88 м/с;
-скорость точки В относительно точки А:
![]() = 66*4,48 = 235,68 м/с;
= 66*4,48 = 235,68 м/с;
-абсолютная скорость точки S2 - центра тяжести кривошипа:
![]() = 39*4,48 = 174,72 м/с.
= 39*4,48 = 174,72 м/с.
1.9 Угловая скорость шатуна:
![]() = 365,2/28,57 = 12,78 с-1.
= 365,2/28,57 = 12,78 с-1.
1.10 Определим направление угловой скорости шатуна 2 следующим образом. Вектор скорости VВА условно перенесем в точку В схемы механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и направлена угловая скорость 2 шатуна. Поставим направление этой скорости на схеме механизма.
1.11 Ускорение точки А по формуле:
![]()
![]() = 8*8*85,71 = 5485,44 мм/ с2
= 8*8*85,71 = 5485,44 мм/ с2
где
![]() - нормальная
составляющая ускорения (нормальное
ускорение) точки А.
- нормальная
составляющая ускорения (нормальное
ускорение) точки А.
1.12 Ускорение точки В относительно точки А:
![]() = 24,01*85,71 = 2057,89мм/
с2
= 24,01*85,71 = 2057,89мм/
с2
1.13 Определим масштаб плана ускорений. Для этого вначале выберем на чертеже место полюса плана ускорений Pa, параллельно отрезку ОА схемы механизма изобразим вектор (Paа) нормального ускорения точки А произвольной длины.
 1.14
Масштаб плана ускорений:
1.14
Масштаб плана ускорений:
![]() =
5485,44/120 = 45,712
=
5485,44/120 = 45,712
1.15 Длина вектора anBA нормального ускорения точки В относительно точки А:
![]() = 2057,89/45,71 = 45 мм.
= 2057,89/45,71 = 45 мм.
1.16 Из конца вектора
Paа
(точки
![]() )
проводим вектор ускорения anBA
длиной
)
проводим вектор ускорения anBA
длиной
![]() ,
который должен быть параллелен отрезку
АВ
и направлен от точки В
к А
механизма.
,
который должен быть параллелен отрезку
АВ
и направлен от точки В
к А
механизма.
1.17 Перпендикулярно вектору через точку n2 проводим прямую.
1.18 Параллельно линии движения ползуна 3 проводим прямую через полюс Ра до пересечения с прямой, проведённой через точку n2. Полученная точка их пересечения b' определяет дины векторов ускорений aBA и aB.
1.19 Для нахождения величины ускорения точки S2, принадлежащей шатуну, необходимо на векторе относительного ускорения aBA найти соответствующую точку S2', делящую отрезок a'b' пополам, и провести вектор Ра S2'.