

Формирование квадратур
Одним из факторов, определяющих схемную реализацию аналогового приемного тракта, является способ формирования квадратурных составляющих сигналов. Разложение на квадратуры может осуществляться как в аналоговой части, так и в цифровой.
Разложение на квадратурные составляющие в аналоговой части осуществляется по схеме, приведенной на рис. 4.
Рис. 4. Схема аналогового формирователя квадратур
Известны два способа цифрового формировании квадратурных каналов:
– применение преобразователя Гильберта (ПГ) и перенос спектра сигнала по оси частот на величину fs/4 с помощью комплексного перемножителя (КП). Схема такого формирователя квадратурных отсчетов сигнала приведена на рис. 5.;
– перенос спектра сигнала по оси частот на величину fs/4 с помощью комплексного перемножителя и низкочастотная фильтрация полученного сигнала. Схема такого формирователя квадратурных отсчетов сигнала показана на рис. 6.
Рис. 5. Схема цифрового формирователя квадратур на основе преобразователя Гильберта
Рис. 6. Схема цифрового формирователя квадратур на основе низкочастотной фильтрации
Алгоритмы БПО.
Алгоритмы работы блока пространственной обработки сигнала (БПО) подразделяются на четыре группы:
Функциональные
Контрольные
Вспомогательные
Интерфейсные
Функциональные алгоритмы обеспечивают главный режим работы– цифровое диаграммообразование, включая подавление активных шумовых помех.
Контрольные алгоритмы подразделяются на непрерывный и тестовый.
Непрерывный контроль действует в течение всего времени, когда устройство работает в главном режиме. Его работа не требует подключения дополнительного оборудования (приборов, стендов и т.п.). Непрерывный контроль осуществляется по части наиболее важных узлов и сигналов устройства, по которым с высокой достоверностью можно судить о его исправном состоянии.
Тестовый контроль осуществляется в сервисном режиме работы устройства. Он предназначен для детального контроля цепей и узлов с помощью вспомогательного оборудования. Данный контроль проводится в соответствии с регламентом и во время ремонта устройства.
Вспомогательные алгоритмы предназначены для проведения приемо-сдаточных испытаний на заводе-изготовителе, а также для юстировки АФАР в составе изделия радиолокатора.
Интерфейсные алгоритмы описывают форматы и протоколы связи с внешними устройствами.
Схематично состав алгоритмов БПО показан на рис.7 (серые прямоугольники обозначают собственно алгоритмы, белые – группы алгоритмов).
Рис.7. Структура алгоритмов БПО
Функциональные алгоритмы.
Функциональные (боевые) алгоритмы обеспечивают работу устройства по его основному назначению согласно техническому проекту. Базовым является алгоритм цифрового диаграммообразования. На его основе строятся матрицы «цифровых» лучей а также процедуры помехоподавления.
1.1. Формирование диаграмм направленности
Группа алгоритмов диаграммообразования основана на базовом алгоритме цифрового синтеза ДНА, который определяет основную функцию БПО –цифровое формирование диаграммы направленности ЦАР.
Цифровые диаграммы формируются путем умножения векторов входных сигналов на комплексные весовые коэффициенты.
БПО осуществляет синтез цифровых ДНА, составляющих матрицы цифровых лучей (конфигурации)..
Для каждого входного вектора комплексных амплитуд, отражающего распределение поля принимаемого сигнала по раскрыву антенны в текущий момент времени, вычисляются выходы всех диаграмм. Для этого необходимо вычислить N весовых векторов W путем расчета ДПФ от заданных ДНА (N-число лучей в заданной матрице). Форма диаграмм зависит от ориентации физической ДНА ФАР, особенно вблизи границ сектора сканирования.
Диаграмма направленности прямоугольной решетки (по мощности) описывается выражением
|F(,)|2=F2пр(,)F2р(,)
где
Fпр(,) - ДН каждой подрешетки (при условии их равенства)
Fпр(,) – множитель решетки.
F2р(,)=|nmw(n,m)exp[j·sin(mdxcos+ndysin)2/]|2
где n, m – номера строк и столбцов в решетке (в данном случае – позиции подрешеток),
, - углы в сферической системе координат.
Пример рассчитанной ДНА при нулевом отклонении луча приведен на рис. 8.
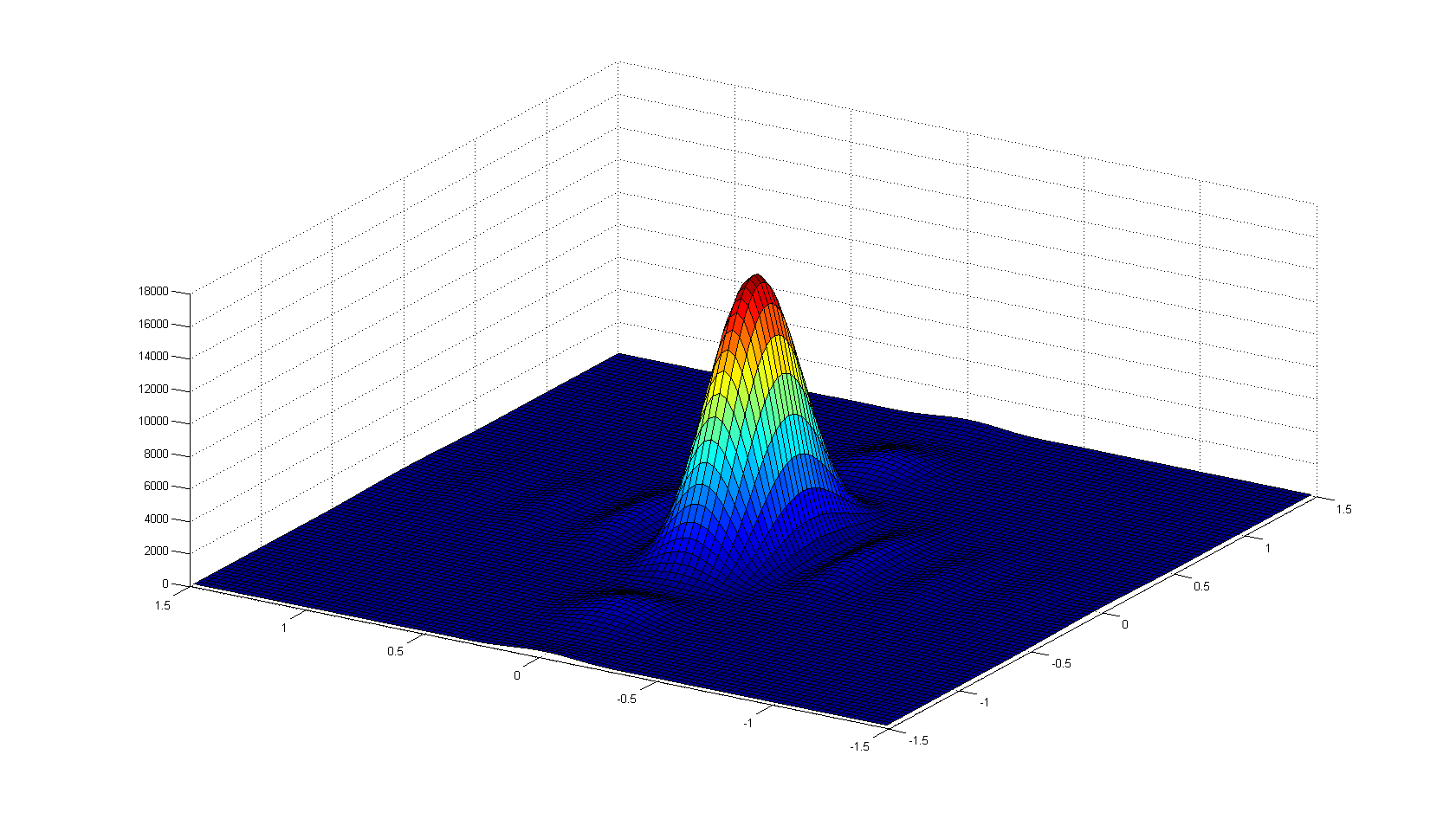
Рис. 8. ДН неотклоненного луча
При равномерном амплитудном и линейном фазовом распределении поверхность распределения фазы представляет собой плоскость в трехмерном пространстве. Направление луча определяется как направление нормали к этой плоскости. Если главный лепесток ДН направлен в точку с координатами 0,0 то прогрессивный линейный набег фаз вдоль оси X и Y определится по формулам:
x=sin(0)cos(0)dx2/ , y=sin(0)sin(0)dy2/,
где dx и dy – расстояния между центрами подрешеток (в данном случае они равны).
Направление луча удобнее задавать не в сферической системе координат, а через направляющие косинусы. При этом луч представляется единичным радиус-вектором в пространстве. Направляющие косинусы равны проекциям конца вектора на оси x и y:
Cos(0)=sin(0) cos(0) , Cos(0)=sin(0) sin(0).
Линейный набег фаз определится через направляющие косинусы следующим образом:
x=cos(0)dx2/ , y= cos(0)dy2/.
Задавать направление луча в командах установки режима удобнее так же в значениях направляющих косинусов.
По значениям Δx и Δy легко рассчитываются компоненты вектора W:
w(n,m)=Amnexp(-j( nΔx + mΔy )
Amn - модуль весового коэффициента.
Несколько диаграмм, расставленных в угловых координатах антенной решетки, образуют конфигурацию (или матрицу) цифровых ДНА.
Пример конфигураций:
моноимпульс цели (5 лучей)
моноимпульс ЗУР (5 лучей)
поисковая матрица ЗУР (10 лучей)
матрица допоиска цели (32 луча).
«Цифровые» приемные лучи во всех конфигурациях формируются вокруг основного направления, формируемого фазовращателями подрешеток. Центры конфигураций совмещены с центром оси, совпадающей с направлением фазирования. Сечения ДНА на всех конфигурациях представлены по уровню половинной мощности.
Нумерация цифровых диаграмм проводится по расположению лучей в конфигурациях слева направо и сверху вниз.
В конфигурации «Моноимпульс цели» формируются 5 узких приемных лучей, расположенных в следующем порядке, именуемом «розочкой», рис.9:
Рис.9. Конфигурация «Моноимпульс цели»
Лучи разведены на половину их ширины по каждой угловой координате.
Эта конфигурация используется для сопровождения цели. Для обнаружения цели используется только центральный луч розочки.
В конфигурации «Моноимпульс ЗУР» формируются 5 расширенных приемных лучей, расположенных «розочкой», рис. 10:
Рис. 10. Конфигурация «Моноимпульс ЗУР»
Лучи разведены на половину их ширины по каждой угловой координате.
Для формирования круглых лучей используется часть элементов ЦАР и амплитудно-фазовое распределение для расширения луча°.
Эта конфигурация используется при сопровождении ЗУР.
В конфигурации «Поисковая матрица ЗУР» формируются 10 приемных лучей, расширенных приемных лучей, расположенных в порядке, указанном на рис. 11:
Рис. 11. Конфигурация «Поисковая матрица ЗУР»
Эта матрица может использоваться в режиме поиска и захвата ЗУР.
В конфигурации «Поисковая матрица цели» формируются 32 узких приемных луча, расположенных в порядке, указанном на рис. 12. Этот режим может использоваться для быстрого допоиска и захвата цели в средней и ближней зоне.
Рис. 12. Конфигурация «Поисковая матрица цели»