

10.5. Синтез цифрового регулятора в линеаризованном электроприводе без учета дискретности регулирования
Из ТАУ известно, что в том случае, когда частота среза логарифмической частотной характеристики разомкнутой импульсной системы на много меньше частоты квантования по времени, систему можно рассматривать как аналоговую. В частности, практика показала, что в цифровом приводе при выполнении условия T0≤2π/ωср, где ωср – частота среза непрерывной части, запас устойчивости и вид переходных процессов мало отличаются от аналогового привода. При высоком быстродействии современных микропроцессоров и высокой рабочей чистоте импульсных датчиков такое условие часто выполняется. Поэтому во многих случаях при синтезе цифровых регуляторов импульсным характером процессов можно пренебречь.
10.5.1. Линеаризация характеристик цифрового регулятора
Для того чтобы еще более упростить задачу, линеаризуем имеющиеся в структурной схеме (рис. 10.7) нелинейности. Статическая характеристика квантователя по уровню (рис. 10.6) может быть линеаризована следующим образом. Представим квантователь в виде структурной схемы рис. 10.8, содержащей два нелинейных и один линейный элемент, с выходной характеристикой, соответствующей рис. 10.6. Линейный элемент 1 как раз и соответствует линеаризованной характеристике квантователя по уровню, нелинейный элемент 2 отражает периодическую составляющую, обусловленную ступенчатым характером выходной характеристики квантователя, а нелинейность типа ограничение 3 отражает конечное число разрядов квантователя. Линеаризовать преобразователь означает, что из трех звеньев мы рассматриваем только звено 1
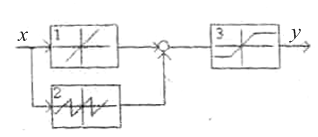
Рис. 10.8. Эквивалентная структурная схема квантователя по уровню
При этом наибольшая абсолютная ошибка от линеаризации не превышает по модулю значения 0,5h. Чем меньше величина входного воздействия, тем больше оказывается относительная ошибка.
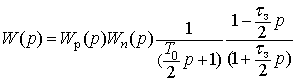
Линеаризацию фиксирующего элемента осуществим исходя из его передаточной функции (10.7). Используя разложение экспоненты в ряд Паде, и ограничиваясь первым членом, эту передаточную функцию можно записать в виде

Используя тоже разложение, звено чистого запаздывания можно представить эквивалентным неминимально-фазовым звеном с передаточной функцией
(10.7)

В результате передаточная функция разомкнутой системы электропривода с линеаризованным цифровым регулятором запишется выражение
(10.8)
10.5.2. Реализация цифрового регулятора без учета дискретности регулирования
Передаточную функцию регулятора мы можем определить так же, как это делали в аналоговом электроприводе. Предположим, что мы строим систему стабилизации скорости (рис. 10.9). Считая, импульсный преобразователь и датчик скорости безынерционными, что в данном случае совершенно справедливо, положим, что объект регулирования (двигатель) описывается передаточной функцией (7.18) Тогда передаточная функция разомкнутой системы запишется выражением
(10.9 а)
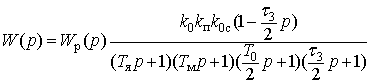
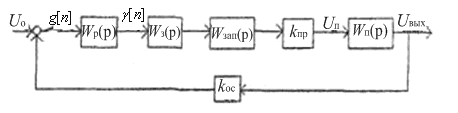
Рис. 10.9. Структурам схема линеаризованной цифровой системы стабилизации скорости электропривода
Обозначим, Tμ=Tn+T0/2+τз/2 и перепишем передаточную функцию в виде (10.9.б).
Передаточная функция настроенной на технический оптимум разомкнутой системы должна соответствовать (7.14). Приравнивая правые части (7.14) и (10.9.б), найдем желаемую передаточную функцию регулятора
(10.10)
 ,
,
Учитывая, что τз<<Tм, влиянием постоянной τз можно пренебречь и выразить передаточную функцию регулятора в каноническом виде (7.17). Как определяются k0 и kп мы показали в п. 8.2.1. Передаточной коэффициент импульсного датчика скорости, определяется ценой младшего разряда, поэтому в зависимости от способа импульсного измерения скорости, согласно выражениям (8.31) имеем:
при измерении первым способом
kос=2π/(zT0)
при измерении вторым способом
kос=2πm/(zs02Tс).
Напомним, что при первом способе дискретность измерения T0 может задаваться компьютером, а при втором способе она определяется соотношением T0=Tиm, где Tи – длительность периода импульсов с датчика скорости. Следовательно, при втором способе измерения скорости возможна синхронизация работы цифрового регулятора от датчика скорости.
Для реализации регулятора нам необходимо создать цифровой интегратор. Существуют различные алгоритмы цифрового интегрирования с учетом квантования по времени и по уровню. Чем большую точность интегрирования мы хотим получить, тем более сложный алгоритм необходимо использовать. Причем повышение точности требует увеличения числа периодов, информация которых при расчетах учитывается, что ведет к увеличению фактического запаздывания регулирования. Поэтому не следует увлекаться усложнением алгоритмов. Например, достаточную точность имеет интегратор, реализующий дискретную передаточную функцию
(10.11)

в соответствии, с которой разностное уравнение, определяющее алгоритм работы ЦВМ имеет вид
![]() ,
,
где f[n] – сигнал на выходе интегратора на n-м такте регулирования; g[n] – сигнал на входе интегратора на n-м такте регулирования. Аналогично, с соответствующими индексами, обозначены сигналы на предыдущих рассматриваемому тактах регулирования. С учетом заданного значения kр и необходимости введения пропорциональной составляющей сигнал, разностное уравнение, определяющее алгоритм работы регулятора получит вид
γ[n]=(g[n]+f[n])kр.
Если для настройки потребуется применение цифрового ПИД-регулятора, то алгоритм его работы можно найти следующим образом. Перепишем передаточную функцию (7.19) в виде
(10.12)
 .
.
В полученном выражении явно выражены все три составляющих корректирующего сигнала. Как организовать интегральную составляющую мы показали. Что касается дифференциальной составляющей, то ввиду того, что она используется только в качестве корректирующего воздействия и не нуждается в особо высокой точности реализации, ее можно получить по простейшему очевидному разностному уравнению
f1[n]=(g[n]−g[n−1])/T0.
В результате разностное уравнение для ПИД-регулятора получит вид
(10.13)
γ[n]=kр(τ2рf1[n]+g[n](τ1р+τ2р)/τ1р+(1/τ1р)f[n]).
Таким образом, мы получили уравнения для реализации всех рассмотренных видов аналоговых регуляторов в цифровой форме.
В том случае, если время запаздывания τз оказывается значительным и пренебречь им нельзя, мы можем воспользоваться, например, известным в ТАУ частотным методом синтеза последовательного корректирующего контура. Для этого в качестве исходной передаточной функции разомкнутой системы необходимо взять выражение (10.9.а), построить по нему ЛАЧХ, построить желаемую характеристику системы, определить передаточную функцию корректирующего контура и ее дискретный аналог.