

10.2. Датчика цифровых электроприводов
В подавляющем большинстве объекты регулирования электропривода являются аналоговыми устройствами, а их координаты (угол поворота, линейное перемещение, скорость и др.) непрерывные величины. Очевидно, что для построения цифровых систем управления такими объектами необходимо применение датчиков, преобразующих перечисленные аналоговые величины в цифровую форму. Датчики в существенной мере определяют показатели системы в целом и поэтому должны удовлетворять некоторым основным требованиям: высокая точность и большой диапазон преобразования; достаточное быстродействие; отсутствие обратного действия на входную величину; минимальный уровень собственных помех; однозначность фиксации нулевого положения.
10.2.1. Датчики скорости
По виду первичного сигнала датчики скорости вращения можно разделить на три типа: аналоговые, импульсные и позиционные.
В аналоговых датчиках скорость измеряется с помощью обычных тахогенераторов с последующим преобразованием напряжения на выходе тахогенератора в тот или иной цифровой код. Принципы построения таких преобразователей хорошо известны. Число разрядов N и частота тактирования ft=1/Tt (дискретность обновления записанной информации) могут изменяться в широком диапазоне. Погрешность таких датчиков определяется погрешностью тахогенератора и в лучшем случае составляет (0,1…0,5) %. Такие датчики не рекомендуется применять в качестве датчика обратной связи в высокоточных приводах. Наиболее рационально их применение в качестве датчиков информации о производной от угла при формировании корректирующих сигналов, где абсолютная погрешность датчика не имеет практического значения.
Как показано в п. 8.4.1 для импульсных датчиков используется два способа обработки поступающей с них информации; измерение числа импульсов, поступающих с датчика скорости за фиксированный промежуток времени и измерение числа импульсов фиксированной частоты заполнения, за один период частоты сигналов с импульсного датчика скорости. Там же даются рекомендации по их использованию и приводятся соотношения для оценки точности. При построении микропроцессорной цифровой системы обработку сигналов с импульсных датчиков с преобразованием их в цифровой код может осуществлять как специальный интерфейс, так и сам микропроцессор. Функциональная схема реализации первого способа представлена на рис. 10.2.а. Сигналы fдс с импульсного датчика 1 через ключ 2 поступают на вход счетчика импульсов 3. Сигналы со счетчика 3 через ключи блока 4 поступают на блок памяти 8. Таймер, формирующий фиксированные промежутки времени T0, реализуется в виде делителя частоты 6 сигналов с некоторого опорного генератора 7. Сигналы с выхода делителя частоты 6 поступают на блок управления 5. Сигналы с выхода блока 5 поступают на сброс памяти, по ним также осуществляется перенос информации из счетчика в память и сброс счетчика. Кроме того, в блоке 5 вырабатываются сигналы, запирающие через ключи вход счетчика на время, операций переноса и сброса счетчика. Время тактирования, определяющее дискретность измерения или величину квантования по времени равно Tt=T0. Число разрядов счетчика, определяющее величину квантования по уровню равно N=int(T0fдс), а цена младшего разряда определяется соотношением (8.31).
Функциональная схема реализации второго способа представлена на рис. 10.2.б. Схема содержит те же элементы, но без делителя частоты. Сигналы fз с генератора частоты заполнения 7 через ключ 2 поступают па вход счетчика 3. Выходы разрядов счетчика 3 через ключи блока 4 связаны с блоком памяти 8. С выхода датчика 1 поступают импульсы с периодом Tдс=1/fдс на блок управления 5. Этот блок выполняет те же операции, что и в рассмотренной выше схеме. В данном случае величина квантования по времени равна Tt=Tдс, число разрядов счетчика определяется соотношением N=int(Tдсfз) а цена младшего разряда в соответствии с (8.32) приближенно может быть записана выражением
h=2πm/(zs02Tс),
где s0 – число импульсов, записанное на счетчике, соответствующее заданному значению скорости.
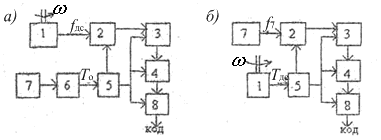
Рис. 10.2. Структурные схемы преобразования "Скорость вращения-Код" с импульсными датчиками скорости
Измерение скорости на основе позиционного датчика, например, фазовращателя мы покажем в следующем пункте.