

10.7.3. Синтез регулятора методом пространства состояния
В системах управления электроприводом часто на одну или несколько координат накладываются ограничения, например, ток или скорость двигателя не должны превышать допустимого значения. При этом приходится таким образом выбирать параметры регулятора, чтобы качество привода удовлетворяю некоторому оптимальному критерию. В этом случае метод ЛАХ не предоставляет удобных путей решения задачи. Некоторые из таких задач, в частности задача синтеза оптимальной по быстродействию системы, могут быть решены методом пространства состояний. При этом в процессе синтеза регулятора одновременно учитывается и нелинейность, обусловленная наличием в системе квантования сигналов управления приводом по уровню. Условие оптимальности по быстродействию может быть записано в виде J=n=min, где n означает число периодов дискретности системы, по истечении которых система отработает заданное входное воздействие. В последующем настройку системы на оптимум будем проводить при ступенчатом входном воздействии.
В общем виде задача синтеза регулятора может быть решена следующим образом:
1. Строится известным способом схема пространства состояния системы, на которой цифровой регулятор заменяется эквивалентным звеном с переменный коэффициентом передачи kр изменяющимся в моменты срабатывания импульсного элемента t=jT0.
2. Известными из ТАУ методами исследования систем через пространство состояний находится переходная матрица Ф(kj,T0) и квадратная матрица коэффициентов A, определяющие поведение системы внутри интервала дискретности и в моменты t=jT0 срабатывания импульсного элемента.
3. По рекуррентным соотношениям
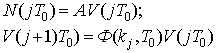
определяющим состояние системы, находится вектор состояния V системы в момент времени t=nT0, где n соответствует минимальному времени переходного процесса.
4. Решается система уравнений

где y(nT0) – главная выходная координата системы, xi(nT0) – переменные пространства состояния, характеризующие непрерывную часть системы, r(nT0) входное воздействие, βi – некоторые постоянные, определяемые по схеме пространства состояния и соответствующие требуемым значениям переменных состояния xi(nT0).
5. Вычисляется ряд значений переменного коэффициента передачи k0,k1,…,kn−1.
6. По полученным значениям ki определяется тип цифрового регулятора, обеспечивающий оптимальный по быстродействию переходный процесс в системе:

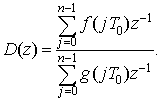
На практике часто оказывается целесообразным составлять систему уравнений не относительно коэффициентов ki, а относительно выходной последовательности сигналов с цифрового регулятора f(jT0), что может упростить расчеты. В этом случае передаточная функция регулятора запишется в виде
Рассмотрим синтез цифрового регулятора следящего привода с передаточной функцией непрерывной части вида
![]()
и периодом дискретности T0. Такую передаточную функцию имеет, например, следящий привод без учета упругости передачи, в котором используется двигатель постоянного тока с импульсным управлением от преобразователя напряжения, с гладким якорем, когда постоянная времени якорной цепи на два порядка меньше электромеханической постоянной и первой можно пренебречь.
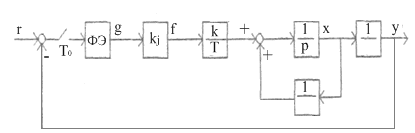
Рис. 10.13. Схема переменных состояния цифрового следящего привода
Схема переменных состояния системы, составленная способом последовательного программирования, изображена на рис. 10.13. Вектор – столбец состояния системы имеет вид V=[r,y,x,g]. Матрицы Фj(λ) и A. Найденные с помощью этой схемы имеют вид

Вектор начальных условий V(0)=[r,y(0),x(0),r−y(0)].
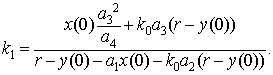
Согласно изложенной выше методике, определим значения коэффициентов передачи k0 и k1 из уравнений y(2T0)=r и x(2T0)=0, где коэффициент 2 означает, что переходный процесс должен закончиться за две дискреты регулирования. В результате получим

В соответствии с принятым обозначением r−y(0)=g(0) выражение для передаточной функции цифрового регулятора запишется в виде
 .
.
2.