

 Министерство
труда, занятости и социальной защиты
РТ
Министерство
труда, занятости и социальной защиты
РТ
Государственное бюджетное образовательное учреждение
среднего профессионального образования
Нижнекамский нефтехимический колледж
Специальность 220301 группа 3911
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Дисциплина Автоматическое управление
Тема Расчет и исследование динамики
автоматической системы
регулирования
Выполнил: Тарасевич Ю.И.
Принял: Колчерина Д.Ш.
2012
 СОДЕРЖАНИЕ
СОДЕРЖАНИЕ
Введение 3
1. Определение передаточной функции объекта регулирования по экспериментальной переходной функции методом «площадей» 4
2. Расчет оптимальных настроек регуляторов методом расширенных частотных характеристик 11
3. Построение АФХ объекта по каналам регулирующего и возмущающего воздействий 19
4. Построение графиков переходных процессов АСР
с различными типовыми законами регулирования 21
5. Анализ качества переходных процессов в
системе с разными законами регулирования 25
Приложение 27
Литература 33
Введение
В настоящее время автоматизация играет ведущую роль в промышленности. Автоматизация – это процесс, при котором функции управления и контроля выполняются методами и средствами автоматики.
При автоматизации технологических процессов создаются системы автоматического регулирования, состоящие из объекта регулирования и регулятора. Задачей регулятора является поддержание регулируемой величины на заданном значении. При регулировании возникает переходный процесс. Качество переходного процесса определяется параметрами качества регулирования, такими как степень затухания, степень колебательности, перерегулирование, время регулирования, статическая ошибка и интегральный квадратичный критерий. Для достижения требуемого качества регулирования нужно рассчитывать оптимальные настройки регулятора.
Все дальнейшие вычисления будут способствовать расчету оптимальных настроек и исследованию динамических характеристик системы автоматического регулирования.
1. Определение передаточной функции объекта регулирования по экспериментальной переходной функции методом «площадей»
Построение математической модели линейной системы по экспериментальной переходной функции производится в следующем порядке:
на основании формы переходной функции и в зависимости от физических свойств исследуемой системы устанавливается вид передаточной функции модели;
определяются значения коэффициентов передаточной функции на условия наилучшего приближения модели объекта;
производится оценка точности аппроксимации.
Одним из наиболее простых и удобных для счета на ЦВМ методов аппроксимации переходных процессов является метод «площадей» (программа КР-1)
Рассмотрим функцию
h(t),
которая получена из экспериментальной
переходной функции объекта путём
исключения чистого запаздывания
![]() и нормировки. Пусть h(o)=
и нормировки. Пусть h(o)=![]() (o)=0.
(o)=0.
При аппроксимации функции h(t) на практике обычно задаются следующими структурами передаточной функции модели:
![]() (1.1)
(1.1) ![]() (1.2)
(1.2)
![]() ; (1.3)
; (1.3)
Выражение
![]() ,
обратное передаточной функции модели,
можно разложить в ряд по степеням p:
,
обратное передаточной функции модели,
можно разложить в ряд по степеням p:
![]() (1.4)
(1.4)
Очевидно, что для
модели (1.1)
![]()
![]()
![]()
для модели (1.2)
для модели (1.3) коэффициенты
![]() ,
,
i
= 1, 2, 3 связаны с коэффициентами
![]() разложения (1.4) системой уравнений:
разложения (1.4) системой уравнений:
![]() (1.5)
(1.5)
Для определения Si воспользуемся связью между S и некоторыми функциями от (1-h). Величину L(1-h) можно представить так:
![]() .
.
Отсюда ![]() ,
,
или ![]() .
(1.6)
.
(1.6)
Разложим функцию![]() в ряд по степеням pt
в ряд по степеням pt
![]() (1.7)
(1.7)
Подставив этот ряд в уравнение (1.6), получим с учетом формулы (1.4) выражение:
![]()
![]() (1.8)
(1.8)
Из выражения (1.8) следует, что коэффициенты Si связаны с переходной функцией h(t) соотношениями:
![]()
![]()
![]()
![]()
Моментом i-го порядка функции 1-h(t) называется несобственный интеграл:
![]() (1.9)
(1.9)
Тогда формулу можно преобразовать:
![]()
![]()
![]() ,
,
![]() (1.10)
(1.10)
Таким образом, определив по графику h(t) значения Mi методом численного интегрирования и вычислив из соотношений величины «площадей» Si, нетрудно найти значение коэффициентов передаточной функции моделей (1.1-1.3).
Выбор вида передаточной функции модели производится из следующих соображений: если коэффициенты S1,S2,S3 положительны, то в зависимости от вида функции h(t) задаются моделью (1.1) или (1.2). Если хоть один из них отрицателен, задаются моделью (1.3).
Перед обращением к программе из экспериментальной кривой разгона необходимо выделить время чистого запаздывания ϊ, затем провести дискретизацию по времени с шагом ∆t и нормировку. Шаг квантования по времени выбирается таким, чтобы на интервале между двумя соседними отсчетами переходная функция была близка к прямой.
Приведение кривой разгона к нормированному, то есть безразмерному виду осуществляется с помощью формулы:
![]() .
(1.11)
.
(1.11)
Пример
Рассчитать и исследовать систему автоматического регулирования температуры пароагрегатной смеси (ПАС), рис 1.1.
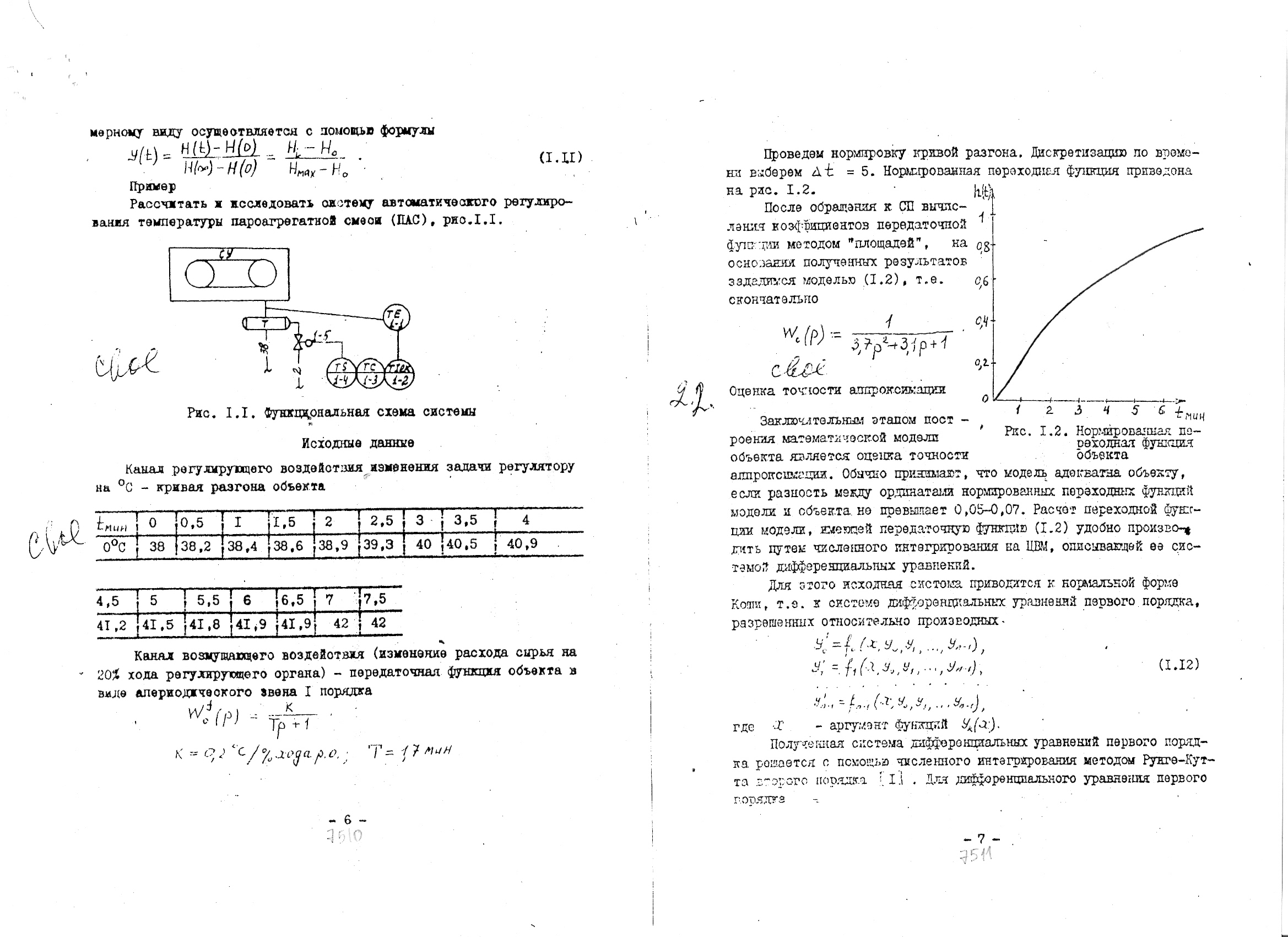
Рис. 1.1. Функциональная схема системы
Исходные данные
Канал регулирующего воздействия изменения задачи регулятору на °С- кривая разгона объекта:
t,мин |
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
0°С |
38 |
38,2 |
38,4 |
38,6 |
38,9 |
39,3 |
40 |
40,5 |
40,9 |
4,5 |
5 |
5,5 |
6 |
6,5 |
7 |
7,5 |
41,2 |
41,5 |
41,8 |
41,9 |
41,9 |
42 |
42 |
Канал возмущающего воздействия (изменение расхода сырья на 20% хода регулирующего органа) – передаточная функция объекта в виде апериодического звена 1 порядка:
![]()
где K=0,2°С/% хода р.о.; Т=1,7 мин.
Проведем нормировку кривой разгона. Дискретизацию по времени выберем ∆t=5. Нормированная переходная функция приведена на рис. 1.2.
Рис. 1.2. Нормированная переходная функция объекта
После обращения к программе КП-1 вычисления коэффициентов передаточной функции методом «площадей», на основании полученных результатов зададимся моделью (1.2), т.е. окончательно
![]()