

7. Понятие математической модели. Классификация моделей в системах управления.
Построение моделей. 1)Сформулировать цели изучения системы. 2)Установить наиболее существенные для данной задачи факторы, компоненты и переменные.3)Учесть тем или иным способом посторонние, не включенные в модель факторы.4)Осуществить оценку результатов, проверку модели, оценку полноты модели.
Математич. модели ОУ:
1) расчетные на основе физич. з-нов (дифференц. уравнения);
2) основанные на экспериментальных динамич. хар-ках.
Виды моделей. 1) Функциональные модели - выражают прямые зависимости между эндогенными и экзогенными переменными.( - эндогенные переменные, их значения определяются в ходе деятельности внутренних компонент системы;- экзогенные переменные определяются пользователем и действуют на систему извне.) 2) Модели, выраженные с помощью систем уравнений относительно эндогенных величин. 3) Модели оптимизационного типа. Основная часть модели - система уравнений относительно эндогенных переменных. Цель - найти оптимальное решение для некоторого показателя. 4) Имитационные модели - весьма точное отображение процесса или явления. Математические уравнения при этом могут содержать сложные, нелинейные, стохастические зависимости.
Имитационные системы занимают в моделировании особое место. В принципе, любая модель имитационная, ибо она имитирует реальность. Основа имитации - это математическая модель. Имитационная система - это совокупность моделей, имитирующих протекание изучаемого процесса, объединенная со специальной системой вспомогательных программ и информационной базой, позволяющих достаточно просто и оперативно реализовать вариантные расчеты. Таким образом, под имитацией понимается численный метод проведения машинных экспериментов с математическими моделями, описывающими поведение сложных систем в течение продолжительных периодов времени, при этом имитационный эксперимент состоит из следующих шести этапов:формулировка задачи, построение математической модели,составление программы для ЭВМ,оценка пригодности модели,
планирование эксперимента,обработка результатов эксперимента.
Модели можно делить по способу измерения времени на непрерывные и дискретные. В любом случае, если в модели присутствует время, то модель называется динамической. Чаще всего в моделях используется дискретное время, т.к. информация поступает дискретно. Но с формальной точки зрения непрерывная модель может оказаться более простой для изучения.
К математическим моделям для АСУ предъявляется ряд требований. Во-первых, математическая модель объекта управления должна достаточно полно (адекватно) описывать основные закономерности его функционирования. Во-вторых, должна быть ориентирована на использование определенных методов (или группы методов), с помощью которых можно найти искомое решение. В-третьих, время нахождения управляющих решений Должно быть приемлемым. При этом определенные ограничения накладываются используемой ЭВМ— ее быстродействием и объемом памяти.
Расчетные сложно сделать. По переход. хар-ке перейти к передаточн. ф-ции математически некорректно.
Д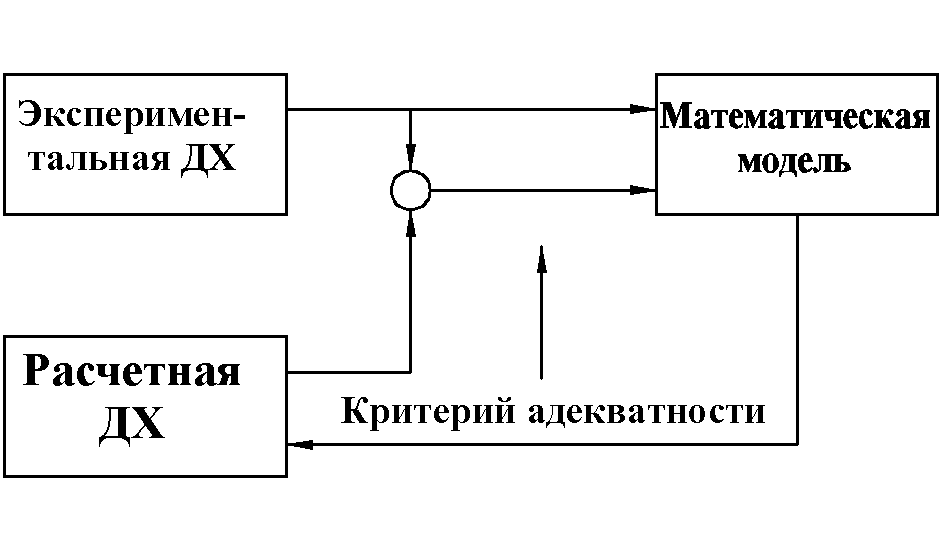 Х-динаимч.
хар-ка. Критерии адекватности – минимум
отклонения аппроксимирующей хар-ки от
экспериментальной: в среднем – минимум
среднего квадратичного отклонения; в
определенных характерных точках.
Х-динаимч.
хар-ка. Критерии адекватности – минимум
отклонения аппроксимирующей хар-ки от
экспериментальной: в среднем – минимум
среднего квадратичного отклонения; в
определенных характерных точках.
Пример получения модели:
аппроксимируем кривую разгона (не переходную характерист.) для объектов с самовыравниванием (одноемкостные, двухемкостные, многоемкостные) с помощью произведения нескольких А-звеньев и звена запаздывания. Для вычисления коэф. моедли использ.:
1) значения k–коэф. передачи модели, τ0–время запаздыв., T0–постоянная времени объекта;
2) координаты точки перегиба tп, hп(tп);
3) значение производных hп’(tп) и hп”(tп) в точке перегиба.
Для построения модели использ. критерии приближения:
1) hа(0)=hэ(0);
2) hа(∞)=hэ(∞);
3) hа’(tп)=hэ’(tп);
4) hа”(tп)=hэ”(tп).
М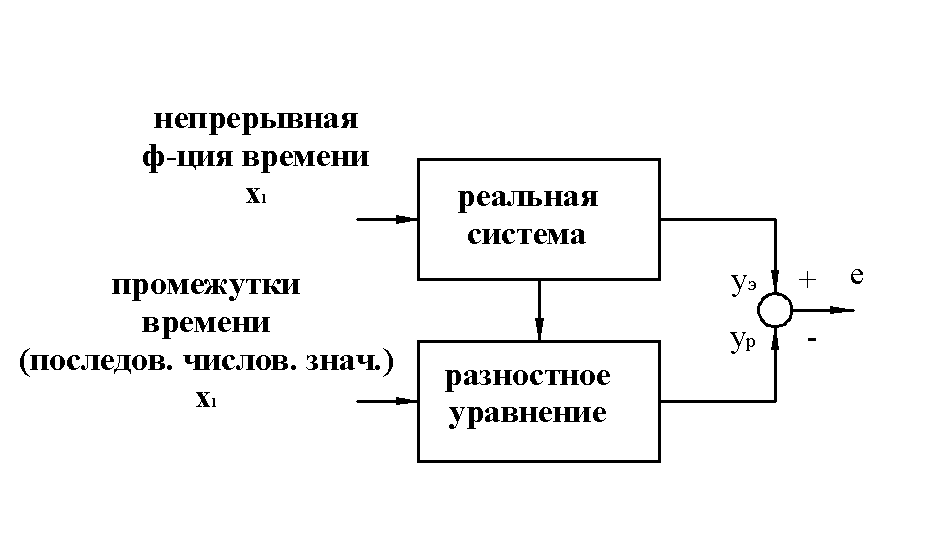 одель
объекта удовлетворяет требованиям
точности, если после подачи одних и тех
же входных воздействий на систему
управления с реальным объектом и систему
с его моделью при оптимальном алгоритме
функционирования контроллера разность
выходных величин обеих систем окажется
достаточно малой. Математич. модель
предполагается заранее известной и
может быть использована для определения
алгоритма ф-циониров. контроллера
(алгоритм управл.) При построении модели
объекта и контроллера следует, когда
это возможно, стремиться к составлению
линейных математических моделей.
одель
объекта удовлетворяет требованиям
точности, если после подачи одних и тех
же входных воздействий на систему
управления с реальным объектом и систему
с его моделью при оптимальном алгоритме
функционирования контроллера разность
выходных величин обеих систем окажется
достаточно малой. Математич. модель
предполагается заранее известной и
может быть использована для определения
алгоритма ф-циониров. контроллера
(алгоритм управл.) При построении модели
объекта и контроллера следует, когда
это возможно, стремиться к составлению
линейных математических моделей.
Имитационная математич. модель: yэ – экспериментальное значение; yр – реакция; e – точность (ошибка).