

2. Классификация внешних воздействий в сау
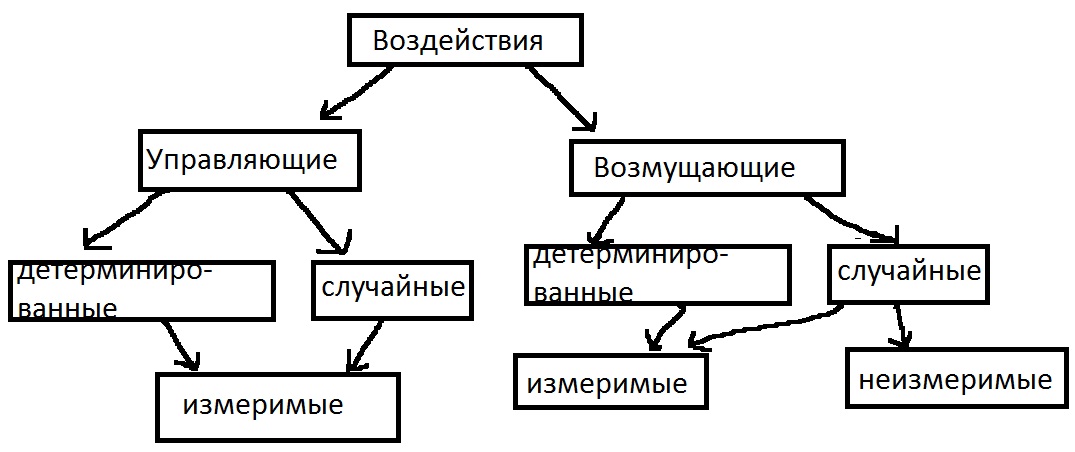
Воздействия, получаемые объектом со стороны внешней среды и приводящие к нежелательным отклонениям управляемых величин, называют возмущающими воздействиями или возмущениями.
Для объектов электростанций возмущениями являются непредвиденные изменения качества топлива, мощности.
Изменение управляемых величин в соответствии с целью управления и поддержания их на неизменном уровне осуществляется подачей на объект управляющих воздействий.
Для реализации этих управляющих воздействий объект снабжается управляющими органами.
Управление, осуществляемое без участия человека, называют автоматическим, а устройство, выполняющее функции управления – автоматическим управляющим устройством или контроллером. Объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления (САУ).
Использованная литература:
Ротач стр. 7, 8
Лекции
3. Цели сау технологическими процессами
Основной целью является достижение экономического эффекта:
Экономия энергии и энергосистем
Экономия сырья и др. компонентов технического процесса
Увеличение срока службы оборудования (экономия капитальных затрат)
Снижение аварийности оборудования
Увеличение выпуска годной продукции (снижение брака, увеличение производительности)
Повышение сорта и цены выпускаемой продукции
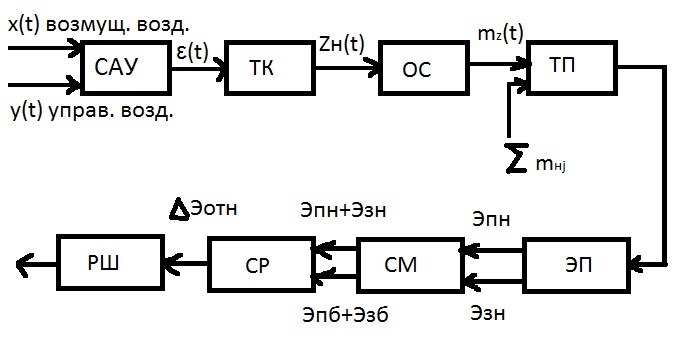
Схема формирования экономического эффекта САУ в режиме нормальной эксплуатации
ΔЭотн
=
ε(t) – ошибка регулирования новой системы
Zн(t) – мгновен. Знач. Технолог. Показат.
Эпн, Эзн – затраты и потери на данную систему
ТК – оператор технолог. качества
ОС – оператор осреднения, ТП – технич. потери,
ЭП – экономич. потери, СМ - суммирование
СР – элемент сравнения, РШ – решения
Использованная литература: лекции
4. Схема формирования экономического эффекта сау в режиме нормальной эксплуатации
ΔЭотн =
ε(t) – ошибка регулирования новой системы
Zн(t) – мгновен. Знач. Технолог. Показат.
Эпн, Эзн – затраты и потери на данную систему
ТК – оператор технолог. качества
ОС – оператор осреднения, ТП – технич. потери,
ЭП – экономич. потери, СМ - суммирование
СР – элемент сравнения, РШ – решения
Использованная литература: лекции
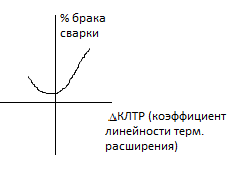
5. Простейшие примеры технологических критериев (тк)..
Первое приближение – дисперсия.
|
|
 -
проектное время
-
проектное время
|
Аналитически
Экспериментально
|

|

|

 ТП2 > ТП1, т.к.
выбросы при т. 2 больше ошибки
регулирования.
ТП2 > ТП1, т.к.
выбросы при т. 2 больше ошибки
регулирования.
6. Схема сау. Понятие функциональной схемы. Структурная схема сау.
Объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления. Несмотря на многообразие САУ и входящих в них элементов, последние могут быть сведены к нескольким основным типам, различающимся по назначению и взаимодействию в системе управления. Наглядное представление об элементах, входящих в САУ, дают функциональные схемы. Функциональные схемы САУ показывают, из каких элементов по функциональному значению состоят системы управления.
|
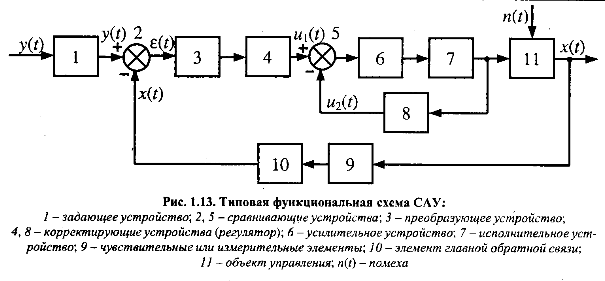
Задающее устройство преобразует воздействие в сигнал у(t).а сравнивающее устройство путем сравнивания сигнала у (t)и регулируемой величины x{t) (предполагается, что 9 и 10 не искажают сигнал χ(t)) вырабатывает сигнал ошибки е(t). Иногда сравнивающее устройство называют датчиком ошибки, отклонения или рассогласования»
Преобразующее устройство 3 служит для преобразования одной физической величины в другую, более удобную для использования в процессе управления (во многих системах преобразующее устройство отсутствует).
Регулятор 4. 8 служит для обеспечения заданных динамических свойств замкнутой системы. Например, с его помощью обеспечивается высокая точность работы в установившемся режиме, демпфируются колебания для сильно колебательных объектов (например, летательных аппаратов). Более того, введение в систему регулятора позволяет устранить незатухающие или возрастающие колебания управляемой величины. Иногда регуляторы вырабатывают управляющие сигналы (команды) в зависимости от возмущающих воздействий, что существенно повышает качество работы систем, увеличивая их точность.
Из
схемы САУ видно, что в хорошо спроектированной
системе ошибка е(t)
должна быть мала. Вместе с
тем
на объект должны поступать достаточно
мощные воздействия. Мощности же
сигнала е(t)
совершенно
недостаточно для питания даже небольшого
двигателя. В связи с этим важным элементом
САУ является усилительное устройство,
предназначенное для усиления мощности
сигнала ошибки е(t)
Усилитель управляет энергией,
поступающей от постороннего источника.
На практике широко используются
электронные, магнитные, гидравлические,
пневматические усилители.[1]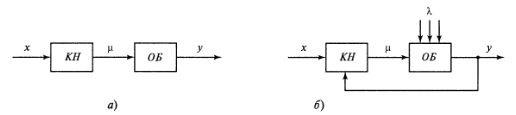
Рис. 1. Структурная схема
Схематическоеизображение (обычноввидепрямоугольников) отдельныхэлементовсистемыивоздействийихдругнадруга (авидестрелок), атакжевоздействий, получаемыхсистемойизвнешнейсредыеефункционирования, называют структурнойсхемойсистемы. Степеньдетализацииотдельныхэлементовсистемы, атакжесампринципвыделенияизсистемыотдельныхееэлементовмогут бытьразличными.
Вотношениивыполняемыхэлементамисистемыфункцийвсякаясистема управлениявнаиболееукрупненномвидедолжнасостоятьиздвухосновныхэлементов: управляемогообъекта (накоторомпротекаетподлежащийуправлениюпроцесс) иконтроллера (осуществляющегофункцииуправленияэтимпроцессом). [2]
Источники:
Пупков К.А. Анализ и статистическая динамика систем автоматического управления http://www.ngpedia.ru/cgi-bin/getimg.exe?usid=9&num=0
Ротач, стр 8-9