

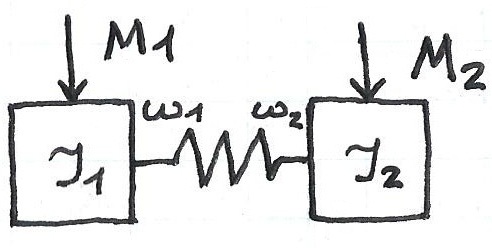
1.В двухмассовой упругой системе, в которой первая масса соединена со второй через редуктор с передаточным числом i и упругую связь с коэффициентом жесткости с', требуется привести параметры системы ко второй массе. Приведите структурную схему и формулы приведения.
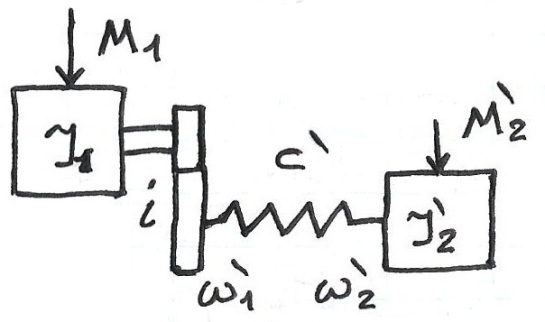
J1,J2 – сосредоточенные инерционные массы;
 ,
на рисунке показано, как редуктор привели
к валу с упругой связью;
,
на рисунке показано, как редуктор привели
к валу с упругой связью;
ω1, ω2 – угловые скорости на конце и в начале вала; φ1, φ2 – углы скручивания;
допущения:
инерционными свойствами обладают массы с моментами инерции J1, J2.
связь предполагается безинерционной и подчиняется закону Гука, т.е. существует прямая пропорциональность между моментами, приложенными к этой связи и ее передаче.
после снятия действующих моментов, деформация становится равной нулю.
предполагается, что в схеме есть передаточный редуктор.

Масса
2 зафиксирована. упругий
момент – момент в упругой передаче во
время ее скручивания.
упругий
момент – момент в упругой передаче во
время ее скручивания.
Действует М1 на массу 1 и силы трения:
 ;
;
Myдействует на массу 2:
 Упругий
момент является движущим для второй
массы.
Упругий
момент является движущим для второй
массы.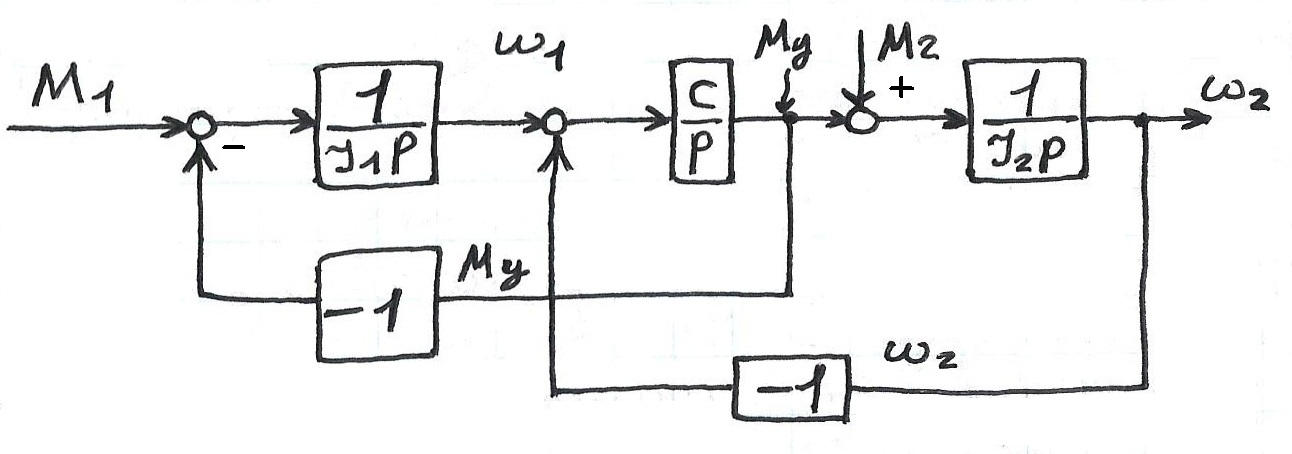
2.В одномассовой системе, на которую действуют моменты Мд и Мс, где Мс – пассивный момент, и которая вращается с постоянной скоростью ωнач, момент двигателя скачком снижен до нуля. Опишите поведение системы и приведите необходимые формулы расчета.
Одномассовая система:
М еханическая
система придет в равновесие, т.е. будет
работать с постоянной скоростью в том
случае, когда MД+МС=0,
что может случиться только тогда, когда
знаки их разные, и обычно знак МД
– плюс, а знак МС
–
минус.
еханическая
система придет в равновесие, т.е. будет
работать с постоянной скоростью в том
случае, когда MД+МС=0,
что может случиться только тогда, когда
знаки их разные, и обычно знак МД
– плюс, а знак МС
–
минус.
Пассивные силы и моменты возникают в механической системе и зависят от направлений напряжений системы (сил трения).
на рисунке: Мс – момент сухого трения (момент сопротивления).
Мдин = Мдв – Мс


момент двигателя скачком снижен до 0:

процесс линейный, значит можно считать, что:


Mc=const, J=const, значит: ω→0.
Если момент сопротивления – момент линейного вязкого трения (рисунок справа), то:


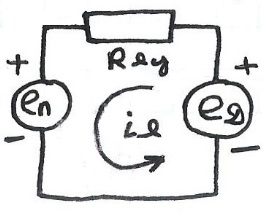
3.Якорная цепь двигателя постоянного тока с независимым возбуждением получает питание от источника напряжения с односторонней проводимостью. Нарисуйте механические характеристики и укажите возможные режимы работы привода.

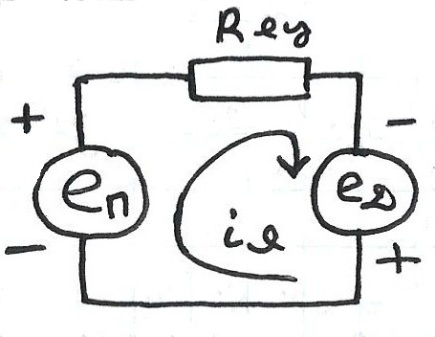
В общем случае привод описывается следующей системой уравнений:
e П=eД+iЯЦRЯЦ+LЯЦpiЯЦ;
где p=d/dt
П=eД+iЯЦRЯЦ+LЯЦpiЯЦ;
где p=d/dt
eД=СДФω;
MД=СДФiЯ;
MД-MC=Jpω;
UВ=iBRОВ+2pnkσwОВpФ;
Ф=f(F);
F=iBwОВ;
Механическая характеристика – одна из статических характеристик: ω=f(M)(MД=МС, eП=const, Ф=const)
для перехода к статическим характеристикам необходимо положить p=0:
e П=eД+iЯЦRЯЦ;(1)
П=eД+iЯЦRЯЦ;(1)
eД=СДФω;(2)(1),(2)
=>
MД=СДФiЯ;
MД-MC=0;
UВ=iBRОВ;
 Ф=f(F);
Ф=f(F);
F=iBwОВ;
(.)
0 МД=0, –
режим
идеального ХХ;
–
режим
идеального ХХ;
(.)
1
(.) 2 – двигатель работает в двигательном режиме:
Двигатель потребляет мощность от преобразователя и за вычетом потерь передает на ИО в виде механической мощности.
(.) 3 – противотоковый режим (противовключение) (тормозной режим).


Двигатель вращается в сторону, противоположную вращению двигателя в двигательном режиме. Происходит потому, что на валу двигателя действует внешний момент, заставляющий вращаться двигатель в другую сторону. Ток якоря превышает ток КЗ, и вся мощность расходуется на нагрев сопротивления якорной цепи.
(.) 4 – Режим рекуперативного торможения. Скорость в этом случае:

В этом режиме двигатель вращается в том же направлении, что и в двигательном режиме, но ЭДС двигателя больше, чем ЭДС преобразователя, и следствием этого является изменение направления протекания тока и изменение знака момента. В режиме рекуперативного торможения основная часть тормозной мощности через преобразователь возвращается в питающую сеть.

4.Двигатель постоянного тока с независимым возбуждением работает на некоторой установившейся скорости ω=ωнач при U1 = const, М=const, и Ф = Фнач. Покажите на механической и электромеханической характеристиках, как происходит переход из одной рабочей точки в другую при уменьшении потока и неизменном моменте нагрузки. Как изменится ток якоря? Приведите формулы и характеристики.

5.Перечислите известные вам способы ограничения якорного тока в приводе с двигателем постоянного тока с независимым возбуждением и дайте их структурные схемы. Дайте краткие описания.
Ввод добавочного сопротивления.
Введение Rдоб в якорную цепь приводит к смягчению электромеханической характеристики при неизменном значении скорости идеального ХХ ω0.
Большой ток Iкз недопустим в двигателе. Если величина Iкз при отсутствии Rдоб недопустимо велика, то для ограничения тока КЗ можно ввести Rдоб.
Способ редко применяется изза недостатков: - мягкость характеристики, - безвозвратная утрата мощности в добавочном сопротивлении.
Обычно вводят добавочное сопротивление в такой схеме для ограничения якорного тока и пускового момента

Пусковая диаграмма: Сначала вводится большое сопр, затем оно уменьшается, т.о. контролируем скорость.
з-низменения тока:
Когда ток спадает до значения I2. Когда ЭДС двигателя примерно равное напряжению на якоре будет становиться равное ед1=сд’ω1.
Использование УОТ
6.Приведите структурную схему электропривода постоянного тока с разомкнутой системой управления при учете внешних воздействий в виде ЭДС преобразователя в цепи якоря, напряжения на обмотке возбуждения и момента нагрузки, предполагая, что характеристика намагничивания линейна.
Поскольку в структурной схеме двигателя присутствуют блоки перемножения на поток и нелинейная характеристика намагничивания, для получения передаточной функции надо перейти к приращениям величины. Покажем это на примере уравнения равновесия напряжений для якорных цепей. Д питаются от общего преобразователя и поэтому используются напряжения на якоре, а не ЭДС преобразователя.

Дадим переменным приращение относительно некоторых начальных значений
 ;
;
 ;
;
 ;
;
 ;
;
 (*)
(*)

исключим из уравнения (*) уравнение статики, тогда получим выражение для приращения величин

Считается что приращения маленькие, тогда считается что Δх * Δу – малая величина, ей пренебрегают


В этих выражениях знаком «нач» помечены начальные значения величин которые зависят от выбора начального режима работы привода.


линеаризация состоит в том что:

переходя к приращениям:

Объединяя эти 2 выражения можно получить:

1ое слагаемое в скобках имеет размерность времени и называется постоянной времени ОВ, Тв ,рассчитанная в рабочей точке при Фнач и тогда передаточная функция линеаризации для цепи возбуждения получит вид:
Выражение для линеаризации схемы ДПТНВ
Может быть построена структурная схема привода приращения:
Поскольку оказалось, что приращение потока действует в 2 различные точки схемы, необходимо перенести выход звена с передаточным коэффициентом ωнач на вход схемы.
Выход
с звена с передаточным коэффициентом
IЯнач,
надо перенести в точку куда подается
напряжение ΔUя.
После преобразований в получившейся
цепи можно, положив ΔUя=0 и ΔМс=0 получить
передаточную функцию
 ,
которая покажет как будет меняться
скорость при изменении напряжения на
ОВ.
,
которая покажет как будет меняться
скорость при изменении напряжения на
ОВ.
После некоторых упрощений ф-ция записывается в виде:

Знак минус перед единицей перед функцией указывает на то, что положительному приращению направления ОВ (Uя) соответствует отрицательное приращение скорости.
При данном линейном напряжении возбуждения, поток будет меняться тем больше, чем больше Кф, и чем меньше сопротивление ОВ
Умножение на Wов показывает, что при увеличении Wов увеличивается намагничивающая сила при данном токе возбуждения
 рассчитано
при начальных значениях.
рассчитано
при начальных значениях.
7. Запишите передаточные функции электропривода с разомкнутой системой регулирования и двигателем постоянного тока с независимым возбуждением при воздействиях в виде ЭДС преобразователя. Покажите характер зависимости ω=f(t) при Тэм<4*Тя.ц. и Тэм>4*Тя.ц. при скачке управляющего воздействия.
Передаточная функция двигателя с независимым возбуждением при постоянном потоке:
Tяц= Lяц/Rяц – постоянная времени якорной цепи, в секундах
Lяц – индуктивность якорной цепи, в генри
Rяц – активное (омическое) сопротивление якорной цепи, в омах.
сд’= сдФ
J – Момент инерции привода (Кг/м2)
 -
ПФ по управлению (по возмущению не
пишем, т.к. воздействие – ЭДС
преобразователя, т.е Мс = 0).
-
ПФ по управлению (по возмущению не
пишем, т.к. воздействие – ЭДС
преобразователя, т.е Мс = 0).
Чтобы получить такие ПФ запишем матричное уравнение:
 =
=

 +
+


мат.А мат.В
мат.А – матрица коэффициентов мат.В – матрица управления
 =
Ах+Вu
(х – вектор вых.координат)
=
рх =>
=
Ах+Вu
(х – вектор вых.координат)
=
рх =>
 ;
;
W(p)
=
 - матричная ПФ
- матричная ПФ
Если взять определитель ПФ, то получим характеристический полином:
 ,
,
 -
электромеханическая постоянная времени
привода.
-
электромеханическая постоянная времени
привода.
 Коэффициенты,
стоящие в ПФ определяют установившееся
значение выходной переменной при
установившемся значении входного
воздействия, т.е. характеризуют величину,
которая установится по окончанию
переходного процесса.
Коэффициенты,
стоящие в ПФ определяют установившееся
значение выходной переменной при
установившемся значении входного
воздействия, т.е. характеризуют величину,
которая установится по окончанию
переходного процесса.
Корни
характеристического полинома будут
вещественными, если

Если условие не соблюдается, то корни комплексно – сопряженные.

До начала переходного процесса существовали начальные значения скорости и тока.
в t0 скачком увеличена ЭДС преобразователя