

4. Формы представления модели
В матмодель входят переменные, фиксированные параметры и константы, математические выражения и логические выражения, которые определяют разные значения.
Инвариантная форма - запись соотношения моделей безотносительно без учета уравнения моделей.
На начальных этапах моделирования P=f(Mд;Ми)*f(t)*f(S)*f(V)*f(;;;r).
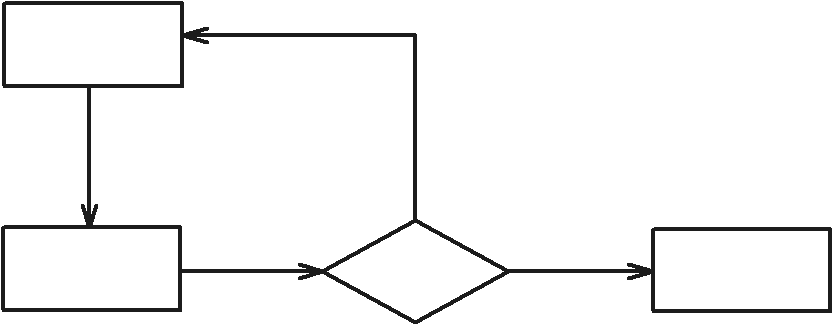
Алгоритмическая запись – запись соотношения модели и метода решения в форме алгоритма.
Аналитическая форма – запись модели в виде результата математических решений уравнения. {2x+3y=4; x-y=5.
Графическая – представление модели на графическом языке (в виде схем, диаграмм, графиков, графов).
5. Классификация моделей
1) по поведению моделей во времени
- динамические. Поведение зависит от времени и время является независимой переменной Fx=mx*x(t)’’
- квазистатические. Поведение системы разбиваем на ряд статичных положений Fx=x*jx
2) по видам входной информации
- детерменированные. Если выполнен комплекс условий K, то наступает событие A. (K->A). Функциональная связь: y=x^2.
Когда параметры и переменные системы точно установлены и между ними определена функциональная связь.
- индетерменированные (стохастические) K->P(A) Модель, для которой устанавливается стохастическая связь. Некоторые параметры и переменные имеют постоянные значения. Например, устанавливаем вероятное значение размера заготовки d=d0k
3) по структуре
- древовидные. Нет замкнутых путей и контуров

- сетевые. Есть замкнутые пути и контуры.
- циклические
Функциональные, структурные, геометрические.
Функциональные модели отображают процесс функционирования системы. Представляют собой системы уравнений.
Структурные отображают структурные свойства объекта. Например, карты техпроцесса, размерный анализ.
4) по методу получения
- формальные
- концептуальные
Формальные – в результате проведения и обработки результатов множества экспериментов. Например – модель силы резания.
P=Cp*S^yр*t^xр*kр
Достоинство – простота получения.
Недостаток – поведение системы происходит в строго определенный рамках, где были проведены эксперименты.
Концептуальная – модель, созданная в рамках общей теории концепции. Показывает физическую интерпретацию наблюдаемого фактора.
Позволяет прогнозировать поведение системы в гораздо более широких пределах.
Точность моделирования в моделях учитывающих фактор – невысокая. Точн можн повыс с пом большего числа факторов, что прив к увел вычислений.
5) по способу получения
6. Методы решения матмоделей
Аналитический метод. Решение уравнений моделей известными математическими методами. Эти методы применяются для первичной грубой оценки поведения системы. Если не найдено аналитическое решение, то применяют численные методы. Например, определение площади контакта тороидального ролика.
Если не найдено численного метода, то применяют качественные методы.
P=Cp*S^yр*t^xр*f(V)*km
Качественные методы позволяют определять асимптотические значения величин. Чаще всего эти методы применяют для определения устойчивости системы.
Имитационные. Планирование и обработка результатов компьютерных экспериментов. Применяются когда нет аналитических зависимостей, описывающих поведение системы.
Имитационная модель представляет собой набор алгоритмов, описывающих поведение системы. Эти алгоритмы, в зависимости от исходных данных, описывают состояние системы, позволяют получить информацию о возможном поведении системы в некоторых ситуациях. Предсказательные возможности ниже, чем у аналитического метода, т.к. описывает вероятностное поведение системы.
7. Математическое моделирование, способы моделирования
1) Масштабное моделирование. Натурный объект и модель имеют одинаковую физическую природу и различаются размерами.
Масштабная модель применяется для проверки адекватности моделей.
2) Аналоговое моделирование. Когда объекты одной физической природы заменяются объектами другой физической природы на основе прямых аналогий.
ЭВМ: ЭЦВМ и АВМ.
Например, применение АВМ для изучения механических, гидравлических, тепловых и других явлений. Например, колебания маятника заменяем колебаниями тока.
3) Натурное моделирование. Часть объекта – в виде натуры, часть – в виде модели (автопилот).
4) Математическое моделирование. Для описания реальных явлений и процессов используются абстрактные математические объекты.
8. Уровни моделирования
В зависимости от уровня абстрагирования, т.е. степени детализации описанных свойств, модели могут разделяться на: микро, макро, мета-уровня.
На микроуровне используются матмодели, описывающие физическое состояние и процессы в сплошных телах. Применяются законы физики твердого тела: материаловедения, пластичности, теплопроводности и т.д.
На этом уровне в техмаше применяются приведенные коэффициенты резания, теплопроводности, упругости. Рассматриваются процессы разрушения металла на различных поверхностях инструмента. Режущая часть инструмента разбив на нескольк элем. Матем аппарат – дифуравн в частных производных.
Модели макроуровня. Абстрагирование от процессов, протекающих в сплошных средах. Элементы модели являются системой макроуровня. Например, режущая часть инструмента – как элемент. Основные переменные: скор, силы, давл. Модели представл собой сист алгебраич или обыкн дифуравн.
В техмаше рассматривают деформации системы СПИД.
Действ силы опред по мод микроур, либо по эмпирич формул (силы резания).
На метауровне – полное абстрагирование физического процесса. Рассматриваются информационные процессы. Матаппарат – теория графов, множеств. Технологические нормы.
Р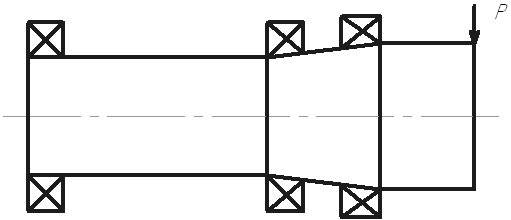 ассмотрим
как балку
ассмотрим
как балку
3 податливые опоры
![]()
Абстрагируемся от зазоров
![]()
Абстрагируемся от податливости опор
![]()
3системы уравнений
![]()
![]()
Чем больше учтено число факторов, тем модель точнее и трудоемкость выше.

Q, - трудоемкость, точность; A – абстрагирование.
Необходимо остановиться на достаточной точности вычислений. Сопоставить с величиной допуска на размер. 0,1Т.
9. Технология моделирования
Основные этапы:
1. Формулирование цели моделирования
2. Разработка концептуальной модели.
3. Подстановка исходных данных.
4. Разработка матмодели
5. Выбор метода моделирования.
6. Выбор средств моделирования.
7. Разработка адекватной модели.
8. Планирование компьютерного эксперимента.
9. Планирование на ЭВМ.
10. Обработка результатов.
10. Формулирование цели моделирования. Разработка концептуальной модели
Проверку адекватности начинают с проверки концептуальной модели.
Цели могут быть количественные и качественные. Количественные – определение конкретных параметров или характеристик системы. Например, расчет погрешностей обработки. Качественные – определение асимптотических значений некоторых параметров системы (увеличение, уменьшение), либо нахождение функциональной зависимости.
Разработка концептуальных моделей требует глубоких знаний темы, т.к. необходимо определить какие факторы оказывают существенное влияние, а какие могут быть отброшены без существенных изменений результатов. Последнее является наиболее трудоемким. Для точного определения влияния какого-либо фактора необходимо создать 2 модели: с учетом его и без учета. Выполнить это по каждому фактору очень трудоемко. Поэтому разработчик модели руководствуясь своими знаниями, опытом или интуицией принимает решение об исключении какого-либо фактора без полной уверенности, что это не внесет существенных погрешностей.
11. Подготовка исходных данных, разработка математических моделей
I. Подготовка исходных данных. Достоверность результатов моделирования однозначно зависит от точности исходных данных. Поэтому сбор исходных данных нужно вести с разработкой концептуальной модели. Сложности сбора исходных данных.
1) большинство параметров являются случайными величинами. Например, действительный размер поверхности в пределах допуска.
2) Некоторые параметры могут быть -------------, например Tсож в течение смены.
3) Некоторые данные можно оценить только приближенно, например, температуру в зоне резания при сверлении.
II. Разработка матмодели. Концептуальная модель и количественные исходные данные служат основой для разработки матмодели.
2 цели:
1) Дать формализованное описание структуры и процесса функционирования системы.
2) Представить процесс функционирования в виде допускающем аналитические исследования системы.
12. Выбор метода моделирования
Наиболее простыми методами являются аналитические зависимости между характеристиками системы и внешними воздействиями. Однако это связано с большой степенью абстрагирования и упрощения реальностей.
Поэтому аналитические методы используют для первоначальной грубой оценки характеристик модели, а также на разных стадиях создания модели.
Если не найдено аналитическое решение, то применяются численные методы. Если не найдены аналитические зависимости, то применяют имитационные методы.
13. Выбор средств моделирования, разработка программной модели
I. Выбор средств моделирования.
К средствам моделирования относятся технические и программные. Технические в основном базируются на ЭЦВМ и АВМ. Основное требование – достаточное быстродействие.
II. Разработка программной модели.
Включает разработку алгоритма, написание и отладку программы. Отладка занимает до 90% времени.
14. Проверка адекватности модели и ее корректировка
Проверка адекватности модели и ее корректировка. Заключается в анализе равнозначности моделей исследуемой системы.
Мера адекватности
1) абсолютная мера
=|yм-yо|
где yм – характеристика модели; yо – характеристика оригинала.
2) относительная мера
=|yм-yо|*100%/yо
Трудности применения этих критериев:
1. не всегда возможно получить характеристики оригинала.
2. Система оценивается по нескольким характеристикам, у которых будут разные отклонения. Нельзя выводить среднюю оценку. Необходимо определить главные характеристики и по ним оценивать.
3. Характеристики оригинала могут быть случайными величинами.
Для устранения случайности ошибок, необходимо провести серию экспериментов и определить аналитическое значение величины.
4. Трудно задать предельные значения . Необходимо ориентироваться на лучшие достижения в данной области. Если адекватность низка, то в нее вносят изменения и корректировки.
Типы измерений
1) глобальные. При обнаружении методических ошибок в концептуальной или математической модели. Например, не был учтен какой-то фактор.
Устранение ошибок приводит к разработке новой модели.
2) локальные. Уточнение некоторых параметров или алгоритмов, может привести к частичному изменению модели и может привести к разработке новой программной модели.
3) параметрическике. Изменение некоторых специальных параметров, называемых калибровочными. Для повышения точности модели необходимо придумать способ варьирования этих характеристик.
k
-15--10 1,8
0-8 1,2
10-15 1
25 0,87
k=A*j^B*e^(C*j)
Чаще всего это связано с эмпирическими значениями некоторых параметров, задаваемых интервалами их величин. Для уточнения значений этих параметров можно провести аппроксимацию значений и получить функциональную зависимость.
Стратегия корректировки должна быть направлена на определение необходимых вначале глобальных, локальных, параметрических зависимостей.
15. Планирование экспериментов с моделью
I. Планирование компьютерного эксперимента.
Применяется при имитации.
Различают стратегическое и тактическое планирование.
Стратегическое – определение числа возможных сочетаний переменных в экспериментах.
Тактическое – совокупность методов уменьшения времени компьютерных экспериментов. Разработка более эффективных программ.
II. Компьютерное моделирование. Работа за ЭВМ. Здесь важен удобный интерфейс и хорошие программно-апаратные средства.
III. Анализ этапов моделирования. Определяется область применения модели, интервалы исходных факторов, погрешности моделирования, назначение.
17. Основные научные направления моделирования точности обработки
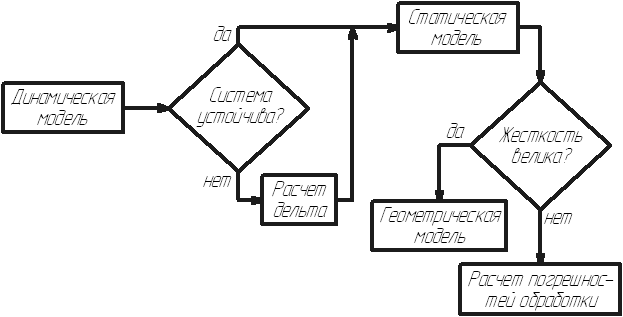
1) Динамические модели. В основе их лежит изменение сил во времени.
Px=mx*x(t)’’
В динамических моделях рассматриваются более общие случаи поведения системы. По ним можно определить амплитудные и частотные колебания сил. Это позволяет определить режимы обработки, при которых действует резонанс или колебания. Если же ничего не удалось, то по ним рассчитываются демпферы или виброгасители.
2) Статические модели. Их можно получить из динамических путем усреднения амплитуды колебаний. Таким образом получаемая квазистатическая система сил рассматривается в аналитическом равновесии. По величинам деформации можно найти погрешность обработки.
3) Геометрические модели. Применяют, когда жесткость системы велика и деформации малы по сравнению с допуском на обработку.
Геометрические модели: размерные цепи, векторные уравнения, погрешности базирования.
у=б+з+пр
В основном применяются модели макроуровня. Модели микроуровня – для расчетов коэффициентов резания.
16. Проблемы моделирования точности обработки в технологии машиностроения
1) Низкий уровень формализаций большинства технических задач. В настоящее время формализованы лишь задачи, связанные с расчетом режимов резания, припусков, расчет отклонений, расчет погрешностей установки, базирования, расчет точности формообразования некоторых поверхностей. Другие задачи в основном решаются на основе рекомендаций и правил. (правило номера баз, выбора переходов, методов обработки, маршрутов, выбора заготовки, т.е. основные задачи проектирования техпроцесса). Такое состояние моделирования не позволяет разработать комплексные модели техпроцесса, операций, переходов. Поэтому при расчете точности решаются отдельные задачи точности обработки: погрешности базирования, установки, закрепления, формообразования.
у=\/(б+з+пр) – погрешность установки
у=б+з+пр
Точность обработки – понятие качественное, оно определяет, на сколько деталь соответствует заданным параметрам.
Для определения точности применяется термин погрешность обработки – разница между заданными и фактическими значениями. После сравнения с ------------ делается вывод о точности.
Такое состояние не позволяет технологу прогнозировать и программировать точность обработки при проектировании техпроцесса. Поэтому всегда применяется натурная отладка или обработка пробной партии, достигает нескольких месяцев. В тех случаях при отладке высока роль субъективного фактора, когда рабочий методом проб ищет параметры операции, обеспечивающие заданную точность. Такое положение приводит к все большему возрастанию затрат на отладку техпроцесса, т.к. требования к точности постоянно увеличиваются.
2) большая роль эмпирических зависимостей. В основном это связано с определением сил резания. Для определения погрешностей обработки необходимо определить деформацию системы СПИД, а для этого необходимо знать силы резания. Однако, силы резания определяются эмпирическими зависимостями.
P=Cp*S^yр*t^xр*kр
Коэффициенты в этой формуле получены при конкретных условиях проведения эксперимента. Поэтому выход за эти пределы не гарантирует точность расчетов.
KpV=VCyft
Tm=(Cv*kV)/(S^yV*t^xV*V) – стойкость.
3) Сложность элементов технологической системы и их большое различие. Одной из основных характеристик при расчете точности, является жесткость СПИД.
Сложность определения жесткости системы СПИД различна. Для инструмента и деталей ее можно рассчитывать достаточно сложно, а для приспособлений и станка – гораздо сложнее, определяется опытным путем. Это приводит к достаточно большим погрешностям точности обработки. Большинство современных методик имеют погрешности расчета точности 15-20%.
18. Принципы моделирования точности обработки одноэлементными инструментами
К этим инструментам в основном относят токарные резцы. Задача ставится так: найти траекторию относительного движения инструмента и найти огибающую. Зная эти траектории получим обрабатываемую поверхность. Моделирование ведется на макроуровне. При этих допущениях полная динамическая модель представляет собой систему дифуравнений не более 13 порядка. Однако вращательными степенями подвижности резца можно пренебречь.
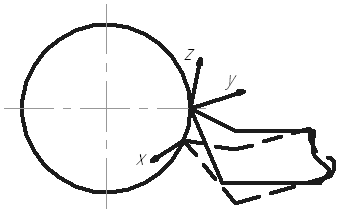
Таким образом степеней подвижности – 3, и все известные модели являются системами 3-х дифуравнений 2-го порядка. По этим моделям определяют режимы резания, геометрию инструмента, геометрию державки резца, длина его вылета, которые дают условие отсутствия колебаний. Если этих условий не найдено, то рассчитывается .
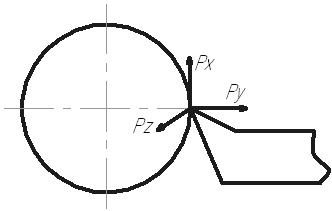
Находим силы, действующие на инструмент
{X=Px/jx; Y=Py/jy; Z=Pz/jz
Определяем направляющую и образующую. Полученные профили продольного и поперечного сечения поверхности сравниваются с допускаемыми.
Если полученные погрешности малы, то жесткость системы велика, рассчитываем погрешности настройки, базирования.
Алгоритм моделирования обработки.
19. Основные причины возникновения погрешностей при обработке отверстий
Обработка отверстий имеет принципиальное отличие от процесса формообразования других поверхностей.
1. Невозможность управления жесткостью системы, т.к. инструмент имеет крайне малую жесткость.
В процессе обработки происходит как бы «запоминание» предыдущих состояний поверхности. Текущее положение инструмента зависит не только от действующих в данном положении факторов, но и от ряда предыдущих положений инструмента, поэтому процесс формообразования наиболее удобно описывать уравнениями с запаздывающим аргументом.
Основные причины погрешности:
1) разность сил, действующих на режущие лезвия. Причины: колебания площадей срезаемых сечений и диссиметрия режущих свойств лезвий инструмента.
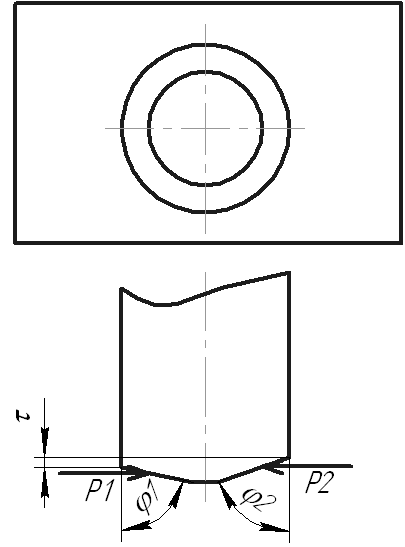
P=*k
kk
P1=1*k1
P2=2*k2
2) Возникновение осевых колебаний шпинделя станка, которые приводят к колебанию подачи инструмента.
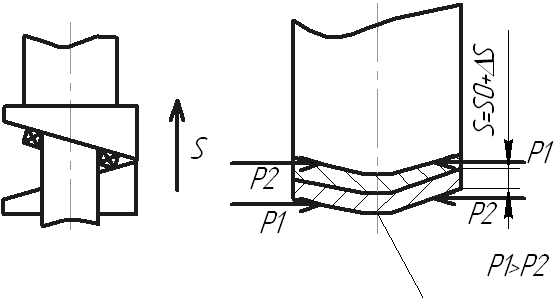
Колебание подачи записывается уравнением: S=S0+S*cos().
S0 – ----------- значение подачи
- текущий угол поворота инструмента
S – амплитуда
20. Концептуальная модель формообразования отверстий, расчетная схема и математическая модель
Концептуальная: инструмент рассматриваем под действием системы сил.
Pi=i*ki – сила резания
i – площадь сечения срезаемого слоя
ki – коэффициент пропорциональности. Зависит от материала детали и инструмента. От геометрии.
3) Для решения исходной системы уравнений применим аппарат уравнений с запаздывающим аргументом.
4) Траекторию движения инструмента будем описывать координатами вершины резания.
При составлении расчетной схемы будем учитывать разность углов в плане, которая приводит к возникновению осевого отставания .
Радиус-вектор – вектор, имеющий постоянную точку отсчета - ось вращения шпинделя. Для построения расчетной схемы применим гипотезу Подураева: погрешность перекоса диаметра инструмента на диаметре отверстия.
Для составления матмодели возьмем 2 уравнения:
1) уравнение означает, что разница сил P1 и P2 приводит к смещению инструмента на величину разбивки.
2) сумма радиус-векторов инструмента всегда равна диаметру
{|P1-P2|=|Dи/2-1()|*jи; 1()+2()=Dи
Для аналитического решения системы применим аппарат запаздывающего аргумента.
()=А((-))
Наиболее грубым методом решения является алгоритмический. Для этого будем рассчитывать радиус-вектор, начиная с определенного положения
Зная координаты вершин режущего лезвия будем знать координаты обработки отверстия в любом направлении.
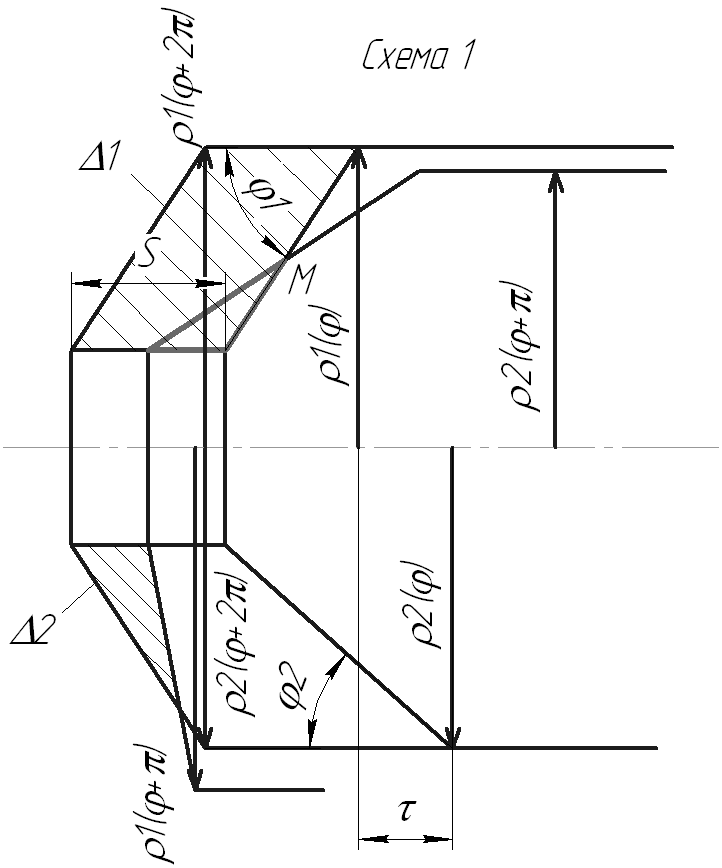
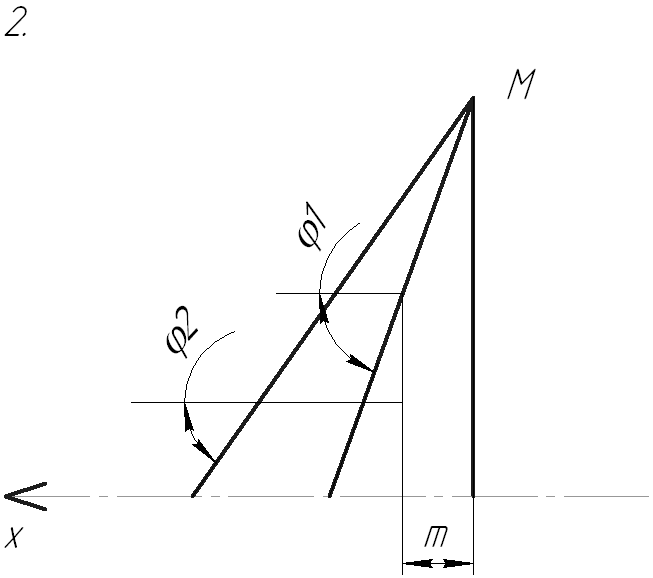
21. Основные модели формообразования отверстий (расчетные схемы)
При вращающемся инструменте каждое лезвие срезает свой слой припуска. В зависимости от сочетаний подачи и осевого отставания вершины режущего инструмента, относительное положение лезвий может быть различным. При этом возможны варианты взаимной координации припуска, когда одно из лезвий срезает часть припуска другого лезвия. Этот вариант на схеме 1. Взаимное пересечение лезвий образуется в точке M. Положение этой точки определяется проекцией на ось инструмента.
M=((-S/2)*tg2)/( tg1- tg2)
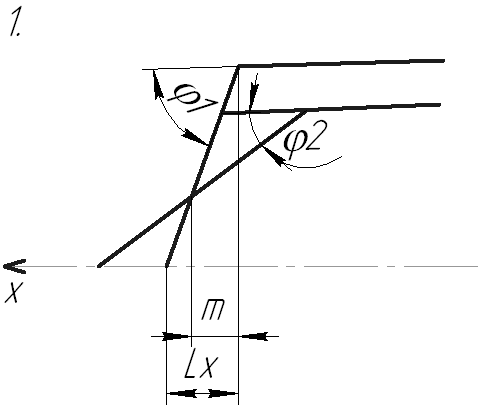
0<m<Lx
Сверление с относит малыми подачами наиб характерно для обраб сталей.
d=10 =0,26 S=0,10,15
m<0
S>2
Сверление -------- большими подачами (Cu, Al).
Практическая разница в этих схемах заключается в том, что влияние напрям обраб на точн разл. Например, для 1 схемы снижение подачи приводит к снижению увода оси отверстия, а для 2-й – к ------------- и увелич увода оси.

m>Lx
>>S/2
Сверление с сильно диссимметричным сверлом.
Практическое значение. При сверлении получается малый увод оси и большая разбивка. При этом, точность --------- ----------- высокая.
Например, сверление 10 мм -> диаметр 12 по 11 квалитету.