

Лекция № 8. Синтез нечетких регуляторов
Как уже отмечалось, выбор функций принадлежности во многом остается предметом интуиции и опыта разработчика.
Существуют стандартные формы задания функций принадлежности (рис. 3.5): треугольная (а), трапецеидальная (б), S - типа, или функция "фильтра" (в), Z - типа (г), колоколообразная (д).
Для
того, чтобы выбрать, например, функцию
принадлежности, приведенную на рис.
3.5, а, достаточно задать 2 ее параметра
– центральную точку
![]() ("прототип" соответствующего
нечеткого множества) и ширину
("прототип" соответствующего
нечеткого множества) и ширину
![]() перехода от принадлежности этому
множеству к непринадлежности ему (т.е.,
по существу, меру "нечеткости"
значения
перехода от принадлежности этому
множеству к непринадлежности ему (т.е.,
по существу, меру "нечеткости"
значения
![]() .
И хотя зачастую это бывает непросто
сделать (существует даже специальное
понятие "сверхнечеткие множества"
- "ultrafuzzy sets", когда положение самой
функции принадлежности является нечетким
и ее границы
.
И хотя зачастую это бывает непросто
сделать (существует даже специальное
понятие "сверхнечеткие множества"
- "ultrafuzzy sets", когда положение самой
функции принадлежности является нечетким
и ее границы
![]() определяются с помощью дополнительно
вводимых лингвистических переменных),
опытный эксперт так или иначе всегда
может выбрать искомые параметры в
соответствии со своими представлениями
о решаемой задаче.
определяются с помощью дополнительно
вводимых лингвистических переменных),
опытный эксперт так или иначе всегда
может выбрать искомые параметры в
соответствии со своими представлениями
о решаемой задаче.
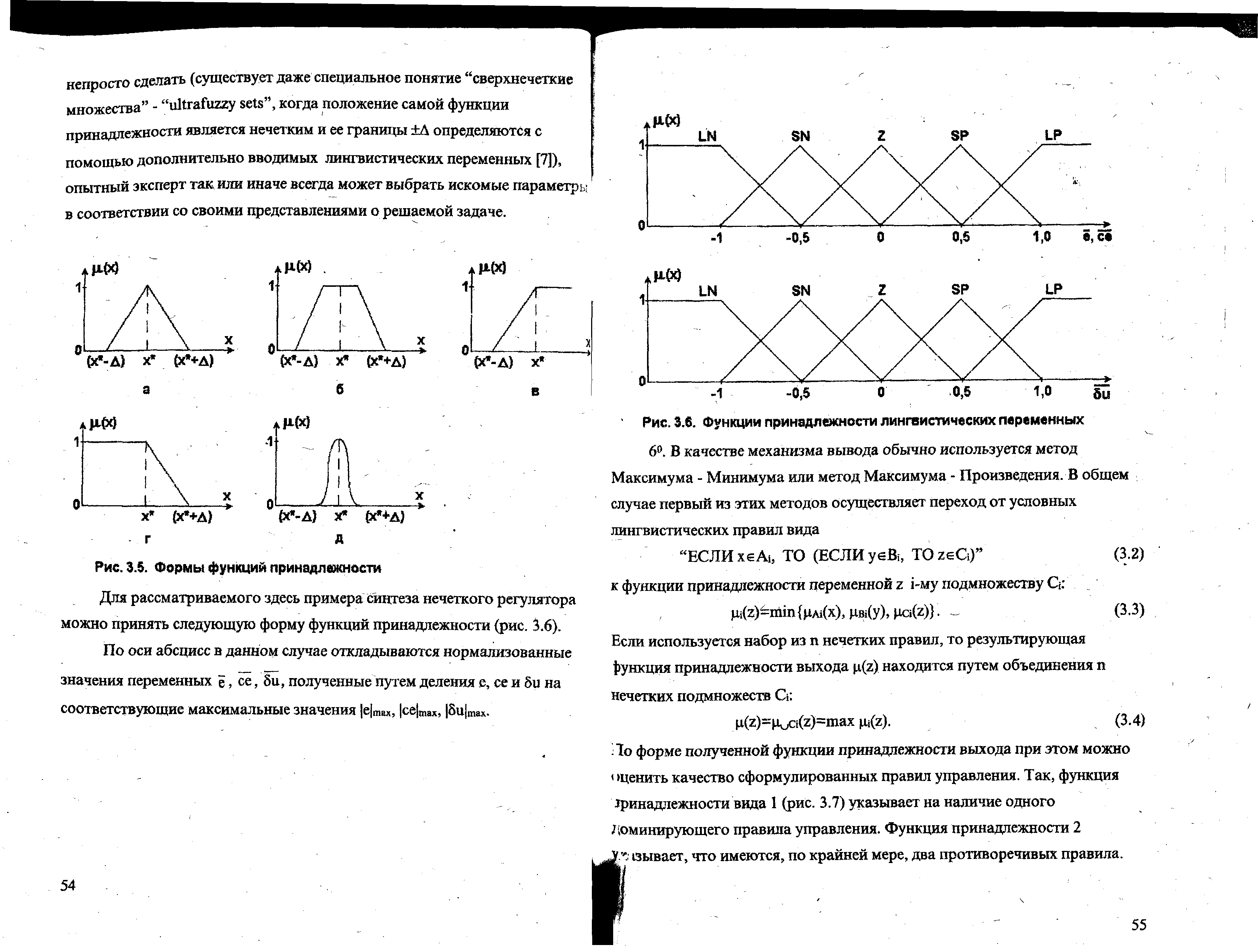
Рис. 3.5. Стандартные формы функций принадлежности
Для рассматриваемого здесь примера синтеза нечеткого регулятора можно принять следующую форму функций принадлежности (рис. 3.6).
По
оси абсцисс в данном случае откладываются
нормализованные значения переменных
![]() ,
,
![]() ,
,
![]() ,
полученные путем деления
,
и
на соответствующие максимальные значения
,
полученные путем деления
,
и
на соответствующие максимальные значения
![]() ,
,
![]() ,
,
![]() .
.
Рис. 3.6. Функции принадлежности лингвистических переменных
В качестве механизма вывода обычно используется метод Максимума - Минимума или метод Максимума - Произведения. В общем случае первый из этих методов осуществляет переход от условных лингвистических правил вида:
"![]() ,
,
![]() " (3.2)
" (3.2)
к
функции принадлежности переменной z
i-му подмножеству)
![]() :
:
![]() (3.3)
(3.3)
Если
используется набор из n нечетких правил,
то результирующая функция принадлежности
выхода
![]() находится путем объединения n нечетких
подмножеств
:
находится путем объединения n нечетких
подмножеств
:
![]() (3.4)
(3.4)
По форме полученной функции принадлежности выхода при этом можно оценить качество сформулированных правил управления. Так, функция принадлежности вида 1 (рис. 3.7) указывает на наличие одного доминирующего правила управления. Функция принадлежности 2 указывает, что имеются, по крайней мере, два противоречивых правила.
Функция принадлежности 3 указывает, что не имеется подходящих правил для вычисления управления (т.е. недостает каких-то правил).

Рис. 3.7. Оценка качества правил управления
Для
дефаззификации чаще всего используется
метод центра тяжести (см. выражение
(2.21)). Однако, вычисляя положение центра
тяжести
![]() для полученного графика функции
принадлежности
для полученного графика функции
принадлежности
![]() следует учитывать факт пересечения
носителей нечетких подмножеств
.
Поэтому каждый раз в процессе дефаззификации
приходится пересчитывать значение
управляющего воздействия
,
что приводит к увеличению времени на
вычисления.
следует учитывать факт пересечения
носителей нечетких подмножеств
.
Поэтому каждый раз в процессе дефаззификации
приходится пересчитывать значение
управляющего воздействия
,
что приводит к увеличению времени на
вычисления.
Процедура дефаззификации существенно упрощается, если значения выходной лингвистической переменной заданы с помощью нескольких одноточечных нечетких подмножеств (singletons), например, как это сделано на рис. 3.8, а.
Допустим,
что полученная на основе механизма
вывода функция принадлежности
принимает вид (рис. 3.8, б), где высоты
отдельных подмножеств (линий) определяются
уровнями активизации соответствующих
правил управления (уровнями выполнения
условий "ЕСЛИ" этих правил). Тогда
вычисление координаты центра тяжести
![]() производится по формуле (сравните с
(2.22)).
производится по формуле (сравните с
(2.22)).
где
![]() - функции принадлежности одному из
одноточечных нечетких подмножеств
- функции принадлежности одному из
одноточечных нечетких подмножеств
![]() (т.е. LN, SN, Z, SP.XP);
(т.е. LN, SN, Z, SP.XP);
![]() - числа носители этих подмножеств. Для
рассматриваемого на рис, 3.8, б случая
имеем
- числа носители этих подмножеств. Для
рассматриваемого на рис, 3.8, б случая
имеем
![]() .
.
Рис. 3.8. Процедура дефаззификации для одноточечных нечетких подмножеств
Эксперименты показывают, что полученные нечеткие системы, даже при сделанных выше упрощениях, являются робастными (т.е. мало чувствительными к различного рода возмущениям) и что эти упрощения не оказывают существенного влияния на качество результатов.
Лекция № 9. Синтез адаптивной САУ с эталонной моделью на основе нечеткой логики
Известно,
что качество процессов управления при
использовании ПИД - регуляторов
существенно зависит от выбора его
коэффициентов усиления
![]() ,
,
![]() и
и
![]() для пропорциональной, интегральной
и дифференциальной составляющей
соответственно. Большинство
инженеров на практике настраивают эти
коэффициенты вручную, методом проб и
ошибок. Эта процедура является достаточно
сложной
и требует опыта проектирования систем
управления. С другой стороны,
наличие такого опыта позволяет построить
процедуру автоматической
настройки коэффициентов усиления
ПИД-регулятора на основе
алгоритмов нечеткой логики. Ниже
рассматривается один из возможных
способов решения данной задачи.
для пропорциональной, интегральной
и дифференциальной составляющей
соответственно. Большинство
инженеров на практике настраивают эти
коэффициенты вручную, методом проб и
ошибок. Эта процедура является достаточно
сложной
и требует опыта проектирования систем
управления. С другой стороны,
наличие такого опыта позволяет построить
процедуру автоматической
настройки коэффициентов усиления
ПИД-регулятора на основе
алгоритмов нечеткой логики. Ниже
рассматривается один из возможных
способов решения данной задачи.
Cтруктурная схема адаптивной системы управления с эталонной моделью имеет вид (рис. 3.9).
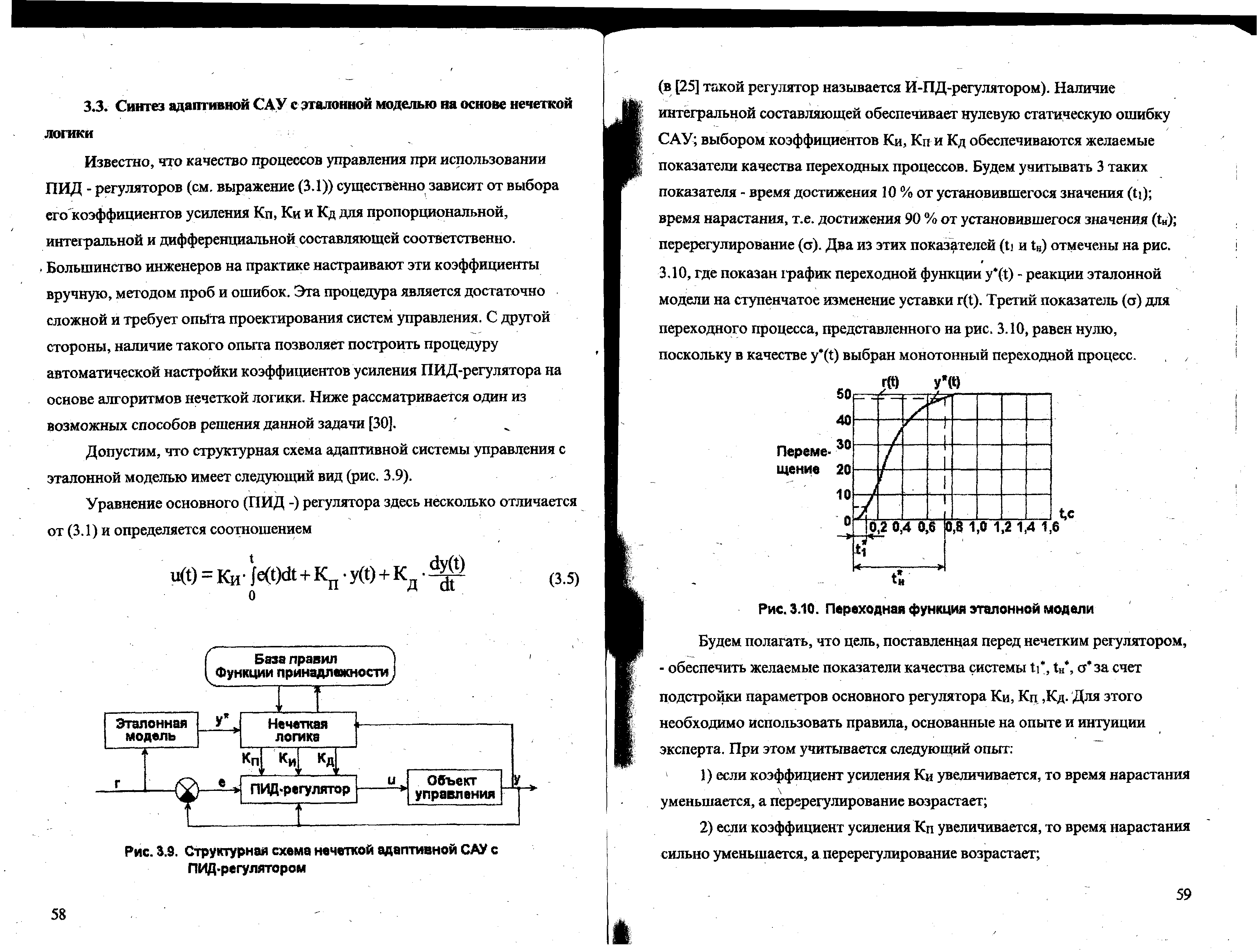
Рис. 3.9. Структурная схема нечеткой адаптивной САУ с ПИД-регулятором
Уравнение основного (ПИД-) регулятора определяется соотношением
![]() (3.5)
(3.5)
Наличие интегральной составляющей обеспечивает нулевую статическую ошибку САУ; выбором коэффициентов , , и обеспечиваются желаемые показатели качества переходных процессов. Будем учитывать 3 показателя динамики САУ:
-
время
![]() достижения
10 % от
установившегося значения;
достижения
10 % от
установившегося значения;
-
время
![]() нарастания,
т.е. достижения 90 % от
установившегося значения;
нарастания,
т.е. достижения 90 % от
установившегося значения;
-
перерегулирование
![]() .
.
Два
из этих показателей
![]() отмечены
на рис. 3.10, где показан график переходной
функции
отмечены
на рис. 3.10, где показан график переходной
функции
![]() - реакции
эталонной модели
на ступенчатое изменение уставки
- реакции
эталонной модели
на ступенчатое изменение уставки
![]() .
Третий показатель
.
Третий показатель
![]() для переходного
процесса, представленного на рис. 3.10,
равен нулю, поскольку в качестве
выбран монотонный переходной процесс.
для переходного
процесса, представленного на рис. 3.10,
равен нулю, поскольку в качестве
выбран монотонный переходной процесс.
Рис. 3.10. Переходная функция эталонной модели
Будем
полагать, что цель, поставленная перед
нечетким регулятором, -
обеспечить желаемые показатели качества
системы
![]() ,
,
![]() ,
,
![]() за счет подстройки параметров основного
регулятора
,
,
и
.
Для
этого необходимо использовать правила,
основанные на опыте и интуиции. При
этом учитывается следующий опыт:
за счет подстройки параметров основного
регулятора
,
,
и
.
Для
этого необходимо использовать правила,
основанные на опыте и интуиции. При
этом учитывается следующий опыт:
1) если коэффициент усиления увеличивается, то время нарастания уменьшается, а перерегулирование возрастает;
2) если коэффициент усиления увеличивается, то время нарастания сильно уменьшается, а перерегулирование возрастает;
3) если коэффициент усиления увеличивается, то время нарастания сохраняется, а перерегулирование слегка возрастает;
4) чтобы уменьшить время достижения 10 % от установившегося значения, необходимо уменьшить коэффициент усиления одновременно увеличить коэффициент усиления
Будем
рассматривать в качестве входов HP
отклонения
![]() ,
,
![]() ,
,
![]() ,
а
под выходами HP
будем понимать настраиваемые значения
коэффициентов
усиления
,
и
основного регулятора.
,
а
под выходами HP
будем понимать настраиваемые значения
коэффициентов
усиления
,
и
основного регулятора.
Базу правил HP, построенную на основе мнений экспертов, представим в виде таблицы 3.2.
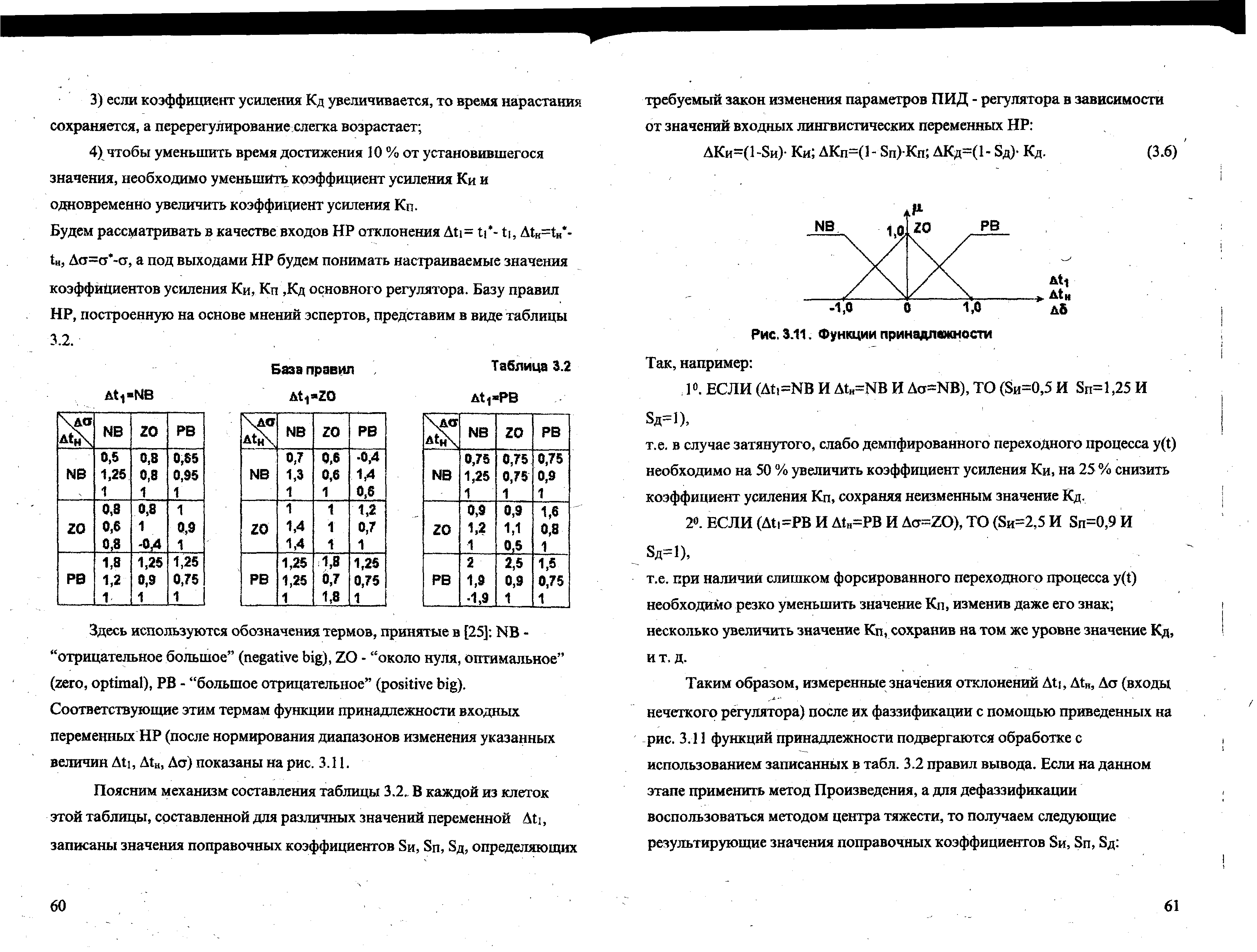
Здесь используются обозначения термов:
NB -"отрицательное большое" (negative big), ZO - "около нуля, оптимальное" (zero, optimal), PB - "большое отрицательное" (positive big).
Соответствующие
этим термам функции принадлежности
входных переменных HP
(после нормирования диапазонов изменения
указанных величин
![]() ,
,
![]() ,
,
![]() )
показаны
на рис. 3.11.
)
показаны
на рис. 3.11.
Поясним
механизм составления таблицы 3.2. В каждой
из клеток этой таблицы, составленной
для различных значении переменной
записаны
значения поправочных коэффициентов
![]() ,
,
![]() ,
,
![]() ,
определяющих требуемый
закон изменения параметров ПИД-регулятора
в зависимости от
значений входных лингвистических
переменных HP:
,
определяющих требуемый
закон изменения параметров ПИД-регулятора
в зависимости от
значений входных лингвистических
переменных HP:
![]() ;
;
![]() ;
;
![]() .
(3.6)
.
(3.6)
Рис. 3.11. Функции принадлежности
Примеры правил:
1°![]() ,
,![]()
![]()
![]() ,
,
т.е.
в случае затянутого, слабо демпфированного
переходного процесса
![]() необходимо
на 50 % увеличить коэффициент усиления
необходимо
на 50 % увеличить коэффициент усиления
![]() на 25 % снизить
коэффициент
усиления
на 25 % снизить
коэффициент
усиления
![]() ,
сохраняя неизменным значение
.
,
сохраняя неизменным значение
.
2°![]() ,
,![]()
![]()
![]() ,
,
т.е. при наличии слишком форсированного переходного процесса необходимо резко уменьшить значение , изменив даже его знак; несколько увеличить значение сохранив на том же уровне значение , и т. д.
Таким образом, измеренные значения отклонений , , (входы нечеткого регулятора) после их фаззификации с помощью приведенных на рис. 3.11 функций принадлежности подвергаются обработке с использованием записанных в табл. 3.2 правил вывода.
Если на данном этапе применить метод Произведения, а для дефаззификации воспользоваться методом Центра тяжести, то получаем следующие результирующие значения поправочных коэффициентов , , :

![]()
 (3.7)
(3.7)

Тройная сумма в каждом из выражений (3.7) учитывает тот факт, что любое из измеренных значений , , принадлежит двум соседним нечетким подмножествам. Число отличных от нуля слагаемых в тройной сумме, записанной в знаменателе (3.7), равно числу активизируемых правил вывода, а величина этой суммы равна сумме уровней активности данных правил (сравните с приведенными ранее предложениями (2.22), (3.4)).
После
вычисления "четких" значений
коэффициентов
![]() ,
,
![]() ,
,
![]() необходимо подставить их в формулы
(3.6), определяющие приращения
искомых параметров (
,
,
)
ПИД-регулятора.
необходимо подставить их в формулы
(3.6), определяющие приращения
искомых параметров (
,
,
)
ПИД-регулятора.
Пример. Объект управления описывается дискретной передаточной функцией
 ,
,
где
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
период
дискретизации
;
период
дискретизации
![]() .
.
На рис. 3.12 приведены результаты моделирования системы, осуществляющей управление перемещением данного объекта.
Пунктирными линиями здесь показаны выходы управляемого объекта до выполнения процессов самонастройки указанных выше коэффициентов усиления. Сплошные линии обозначают выходы эталонной модели и совпадающие с ними выходы объекта после выполнения 5 итераций процесса самонастройки. Приведенные на рис. 3.12 результаты моделирования соответствуют случаям самонастройки для предварительно выбранной медленной (а) и быстрой (б) переходной функции САУ.
Таким образом, использование нечеткого алгоритма адаптации обеспечивает хорошее совпадение переходных процессов на выходе САУ и ее эталонной модели, сохраняя такие традиционные преимущества ПИД-регуляторов, как их низкая чувствительность к параметрическим и сигнальным возмущениям
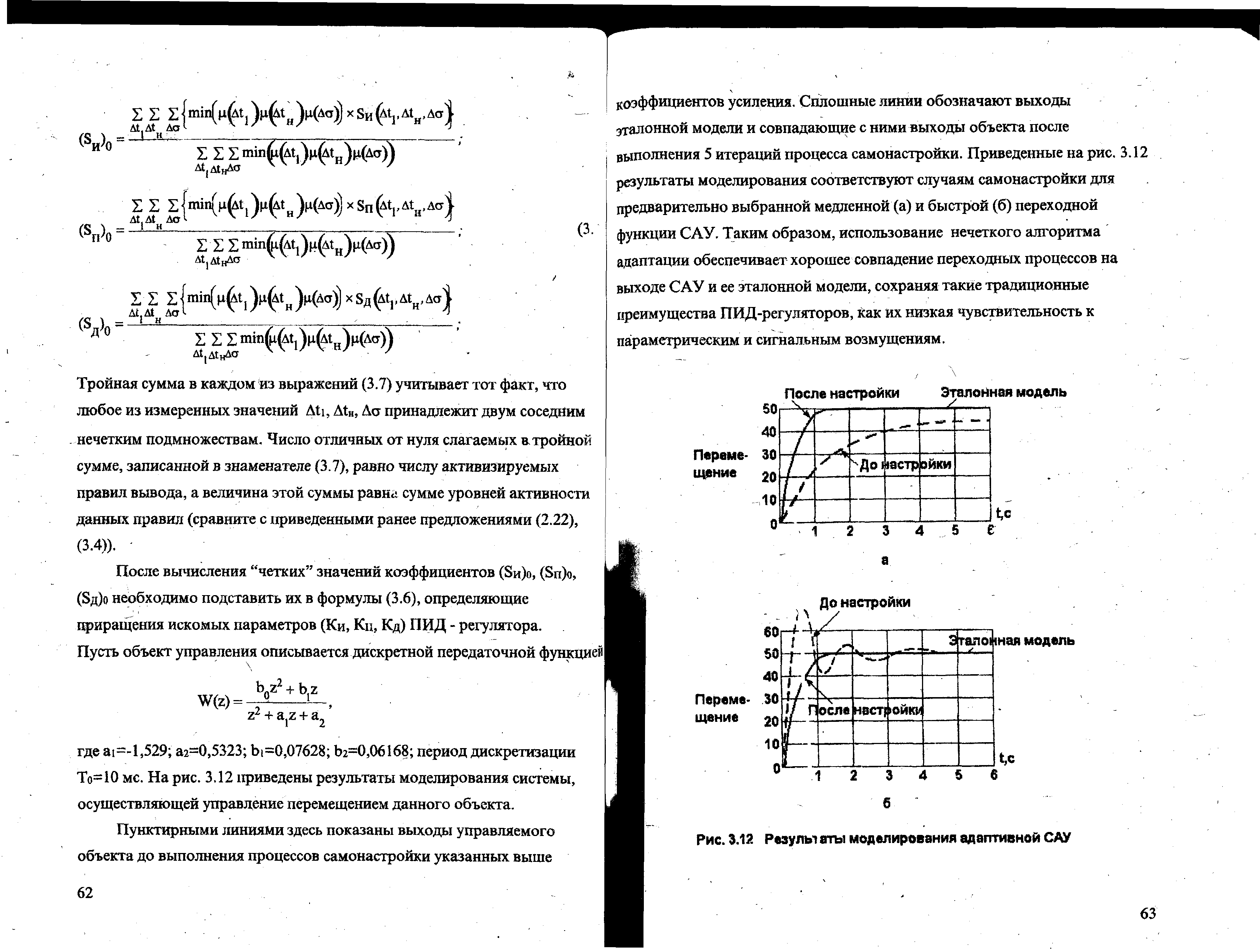
Рис. 3.12. Результаты моделирования адаптивной САУ
Лекция № 10. РЕАЛИЗАЦИЯ И ПЕРСПЕКТИВЫ ПРИМЕНЕНИЯ НЕЧЕТКИХ РЕГУЛЯТОРОВ