

2.3. Настройка точного регулятора.
Теперь необходимо синтезировать точный закон управления. Для этого воспользуемся теми же методами и средой Matlab. Структуру точного регулятора попробуем немного изменить. Исключим из неё релейный элемент и добавим коэффициент усиления по контуру.

Рис.38. Структурная схема точного регулятора.
Оптимизацию будем
проводить, используя не выходную
координату с вала двигателя, а величину
ошибки по положению, т.к. в данном случае
нас интересует исключительно точность.
Оптимизировать будем три параметра:
коэффициент усиления всей системы
![]() ,
коэффициент обратной связи по скорости
и коэффицент усиления по контуру
,
коэффициент обратной связи по скорости
и коэффицент усиления по контуру
![]() .
.
Подадим на вход NCD Outport оптимизируемую величину (величина ошибки по положению ).

Рис.39. Схема модели для оптимизации точного закона управления.
Исходя из предъявляемых
к системе требований, ограничим область,
в которой может располагаться график
зависимости регулируемой величины от
времени. Оптимизацию будем производить
при гармоническом входном сигнале, т.к.
он наиболее трудно поддается точному
слежению. Верхнюю и нижнюю границы
области переходных процессов считаем
обусловленной максимальным значением
входного сигнала плюс 40% запаса с каждой
стороны, крайняя правая – задана временем
регулирования, которое не должно
превышать шести секунд. Т. е. в течение
шести секунд в системе допускаются
переходные процессы, т.к. быстродействие
данного регулятора не является основной
характеристикой. И движение считается
установившимся при попадании величины
ошибки в заданный коридор -
![]() .
.

Рис.40. Задание требований к системе(точный закон регулирования)
В результате поиска было получены следующие коэффиценты: коэффициент усиления Ку= 34.15, коэффициент обратной связи по скорости Кос= 20.97 и коэффициент по контуру Кк= 98.24 . Но величина амплитуды ошибки все равно превышает границы коридора, а также наблюдается слишком большая колебательность установившегося процесса. Поэтому необходимо использовать дополнительные способы повышения точности.

Рис.41. Ошибка слежения после оптимизации в NCD Blockset (точный закон управления).
Повышение точности
Оптимизация существенно улучшила характеристики системы. Но даже при оптимальном выборе коэффициентов усиления и обратной связи система не удовлетворяет заданным требованиям по точности. Уменьшим ошибку слежения до допустимой посредством добавления к входному сигналу его производной.
Рассмотрим
произвольную замкнутую систему с
единичной обратной связью. Пусть имеет
место случай, когда на вход системы
подается линейно-нарастающий сигнал
f=vt , v=const. Тогда
![]() и
изображение сигнала ошибки ∆x(t) имеет
вид:
и
изображение сигнала ошибки ∆x(t) имеет
вид:
![]() .
Примем, что возмущающее воздействие в
системе отсутствует, тогда:
.
Примем, что возмущающее воздействие в
системе отсутствует, тогда:
![]()
В нашем случае передаточная функция Wp(p) имеет астатизм 1-ог порядка, и может быть представлена виде:
![]() ,
,![]()
и при этом W*(0)=1. Тогда в соответствии с теоремой о предельном значении:
 ()
()
Из () видно, что величина е установившейся ошибки пропорциональна скорости изменения задающего воздействия (его производной) и обратного пропорциональна коэффициенту передачи разомкнутой системы К.
Таким
образом, чтобы избавится от установившейся
ошибки, необходимо на вход системы
подать сигнал пропорциональный
производной входного сигнала
![]() .
Коэффициент
.
Коэффициент
![]() подбирается
в зависимости от структуры системы и
приблизительно равен
подбирается
в зависимости от структуры системы и
приблизительно равен
![]() ,
где K
– коэффициент разомкнутой системы.
Моделирование в среде MatLab
показывает, что такой метод повышения
точности вполне оправдан.
,
где K
– коэффициент разомкнутой системы.
Моделирование в среде MatLab
показывает, что такой метод повышения
точности вполне оправдан.
Продолжая
рассуждения нетрудно предположить, что
ошибка при гармоническом воздействии
будет уменьшена до допустимого значения
аналогичным образом. Чтобы вычислить
коэффициент пропорциональности
,
разложим производную входного сигнала
в ряд Тейлора:
![]() …
…
Ограничимся
первыми гармониками разложения:![]() .
Откуда может быть вычислен соответствующий
коэффициент
.
В нашем случае
.
Откуда может быть вычислен соответствующий
коэффициент
.
В нашем случае
![]() .
После этого проведем окончательную
оптимизацию в NCD Blockset по всем четырем
параметрам: Ку,
Кос,
Кк,
k1.
В результате получаем следующие значения
коэффициентов: Ку=
170.77, Кос=
20.97, Кк=
9.82, k1=
21.05. После
моделирования в среде Matlab,
получаем следующие результаты.
.
После этого проведем окончательную
оптимизацию в NCD Blockset по всем четырем
параметрам: Ку,
Кос,
Кк,
k1.
В результате получаем следующие значения
коэффициентов: Ку=
170.77, Кос=
20.97, Кк=
9.82, k1=
21.05. После
моделирования в среде Matlab,
получаем следующие результаты.
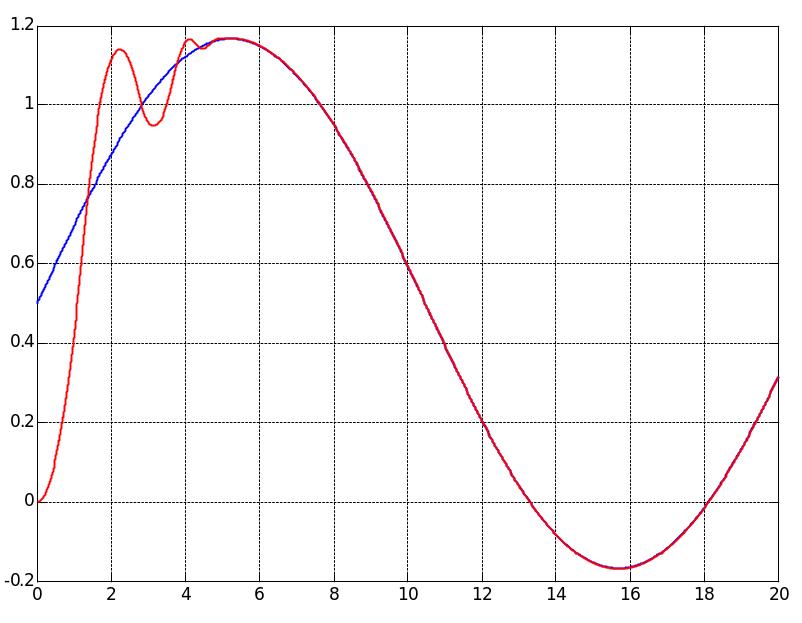
Рис.42. Переходный процесс после оптимизации коэффициентом при производной
(точный закон управления).
Из графиков видно, что данный закон управления обеспечивает необходимую точность слежения, но имеет колебательный переходный процесс.

Рис.43 Ошибка слежения после оптимизации коэффициентом при производной
(точный закон управления).