Содержание
1. Кинематический анализ плоского рычажного механизма 3
1.1 Структурный анализ 3
1.2 Построение схемы механизма в масштабе 4
1.3 Построение планов скоростей 6
1.4 Построение планов ускорений 7
1.5 Построение кинематических диаграмм ползуна 9
2. Кинетостатический анализ 11
2.1 Определение внешних сил действующих на звенья механизма 11
2.2 Расчёт групп Ассура 12
2.3 Расчёт ведущего звена 13
2.4 Определение уравновешивающей силы с помощью рычага Жуковского 13
3. Синтез кулачкового механизма 15
3.1 Построение кинематических диаграмм толкателя 15
3.2 Определение минимального радиуса кулачковой шайбы 17
3.3 Построение профиля кулачковой шайбы 18
4. Зубчатый редуктор 21
4.1 Построение схемы редуктора в масштабе 21
4.2 Определение передаточного отношения методом картин скоростей 21
4.3 Определение передаточного отношения по формуле 21
4.4 Определение времени торможения (разгона) 22
Список литературы 23
1. Кинематический анализ плоского рычажного механизма
1.1 Структурный анализ
1.1.1 Наименование механизма: кривошипно-ползунный
1.1.2 Кинематическая схема механизма
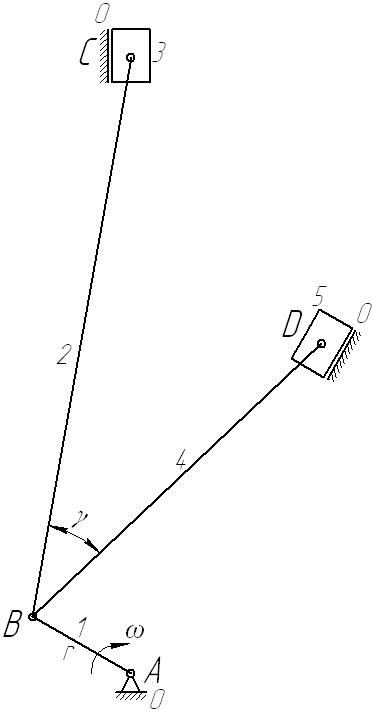
0 - стойка
1 - кривошип
2 - шатун
3 - ползун
4 - шатун
5 - ползун
1.1.3 Характеристика кинематического механизма
Обозначение пары |
Подвижность пары (одно-или двухподвижная) |
Звенья, образующие пару |
Высшая или низшая; вращательная или поступательная |
А10 |
одноподвижная |
кривошип-стойка |
низшая, вращательная |
B12 |
одноподвижная |
кривошип-шатун |
низшая, вращательная |
C23 |
одноподвижная |
шатун-ползун |
низшая, вращательная |
C30 |
одноподвижная |
ползун-стойка |
низшая, поступательная |
B14 |
одноподвижная |
кривошип-шатун |
низшая, вращательная |
D45 |
одноподвижная |
шатун-ползун |
низшая, вращательная |
D50 |
одноподвижная |
ползун-стойка |
низшая, поступательная |
Рассчитаем степень подвижности плоского механизма по формуле Чебышева:
W=3n-2p1-p2
где n – число подвижных звеньев
n=5
p1 – число одноподвижных пар
p1=7
p2 - число одноподвижных пар
p2=0
W=3*5-2*7-0=1
1.2 Построение схемы механизма в масштабе
Исходные данные: радиус кривошипа rAB=110 мм=0,11 м; lBC=0,55 м; lBD=0,385 м.
Масштабные коэффициенты
![]()
![]()
Рассчитаем длину шатунов
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

1.3 Построение планов скоростей
1.3.1 Определим скорость точки B кривошипа
![]()
![]()
1.3.2 Из
полюса p
отложим скорость точки B
в виде вектора ![]() =40
мм
=40
мм
1.3.3
Масштабный коэффициент ![]()

![]()
1.3.4 По теореме о сложении скоростей для точки С составим систему уравнений:

1.3.5 Скорость точки s2 найдём по теореме подобия
1.3.6 Найдём угловую скорость шатуна
![]()
![]()
1.3.7 По теореме о сложении скоростей для точки D составим систему уравнений:

1.3.8 Сравнительный анализ
![]()
№ положения |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
0 |
4,466 |
7,768 |
7,768 |
5,826 |
3,107 |
0 |
3,107 |
5,826 |
7,768 |
7,768 |
4,466 |
0 |
|
0 |
4,519 |
7,119 |
7,46 |
5,953 |
3,159 |
0 |
3,159 |
5,953 |
7,46 |
7,119 |
4,519 |
0 |
∆% |
0 |
1,17 |
8,35 |
3,96 |
2,13 |
1,64 |
0 |
1,64 |
2,13 |
3,96 |
8,35 |
1,17 |
0 |