

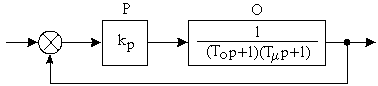
33) Оптимизация на модульный оптимум, объект которого содержит большую и малую инерционности (пропорциональный регулятор).
Применение П-регулятора оправдано, т.к. не требуется следить за емкостью, и будут отсутствовать узлы, шунтирующие емкость на стоянке привода.
В
соответствии со структурной схемой на
рисунке 5.10, передаточные функции
объекта, разомкнутого и замкнутого с
единичной обратной связью контуров:
![]() ;
;![]() ;
;
![]() ;
;
2а0а2 = а12;
2(1+kpk0)Т0Т = (Т0 + Т)2;
kpk0 >>1 1+kpk0 kpk0;
T0 >> T T0 + T T0;
2kpk0T0T = T02;
– коэффициент П-регулятора как у ПИ-регулятора.
Передаточная функция регулятора
![]() .
.

![]() при
То
Т.
при
То
Т.
Т.к. передаточная функция замкнутого контура в данном случае будет практически такой же, как с применением ПИ-регулятора, то характер переходных процессов будет тот же самый.
УР:
 .
.
Замкнутый контур является статическим. Ошибка уменьшается по мере роста коэффициентов.
Ошибка может быть скомпенсирована за счет увеличения сигнала задания.
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
При соотношении применяют П-регулятор.
34,31) Оптимизация контура на симметричный оптимум, объект которого содержит малую и большую инерционность интегрирующего типа.
Применим ПИ-регулятор с передаточной функцией
![]() .
.
С ПИ-регулятором астатическим по заданию и возмущению передаточные функции разомкнутого и замкнутого контуров:
![]() ;
;
2а0а2 = а12 2kpk0ТизТ0 = kp2k02Тиз2 2Т0 = kpk0Тиз;
2а1а3 = а22 2kpk0Тиз2Т0Т = Тиз2Т02 2kpk0T = T0;
;
![]() ;
Тиз
= 4Т;-идеальная
задача оптимизации.
;
Тиз
= 4Т;-идеальная
задача оптимизации.
Проверим решение оптимизации:
![]() .
.
В соответствии с рисунком 5.12, ЛАЧХ разомкнутого контура получилась симметрично относительно частоты среза. Это настройка на симметричный оптимум.
![]() .
.
Передаточная функция замкнутого контура определяется только Т. Этой передаточной функции соответствует переходный процесс, представленный на рисунке 5.13.
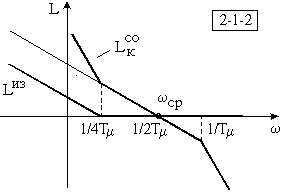

Рисунок 5.12 Рисунок 5.13
t1 = 3,1T; t3 = 16,5T; = 43,4.
Таблица 5.1. Характеристики переходных процессов при различных настройках контура
|
СО |
МО |
, % |
43,4 |
4,3 |
t1 |
3,1Т |
4,3Т |
t3 |
16,6Т |
8,4Т |
35). Оптимизация контура тока при заторможенном роторе. Оптимизация контура тока с заторможенным электродвигателем
Допущения:
-
датчик тока считаем безинерционным
![]() ;
;
-
все малые инерционности, которые имеет
контур, включены на входе ТП
![]() ;
;
- ЭД заторможен (Е = 0) или (Е 0), а значит отсутствует ОС по ЭДС.
Контур тока содержит звенья с большой и малой инерционностью (малую инерционность компенсировать не следует, она будет определять помехоустойчивость контура).
Структурная схема контура тока с учетом сделанных допущений представлена на рисунке 5.22.

Рисунок 5.22
МО:
![]() ;
;
![]() .
.
Получили регулятор тока (РТ) ПИ-типа. С этим регулятором система астатическая и по заданию, и по возмущению (для заторможенного двигателя).
![]() ,
,
где
![]() – передаточная функция прямого канала;
– передаточная функция прямого канала;
![]() – передаточная
функция разомкнутого контура.
– передаточная
функция разомкнутого контура.
Тогда, передаточная функция замкнутого контура тока
 ;
;
 ,
,
где 2Т = Тт – эквивалентная постоянная времени оптимизированного на МО контура тока.