

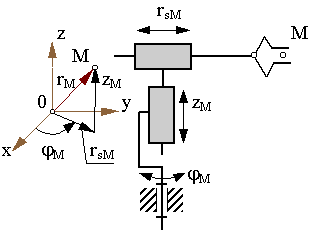
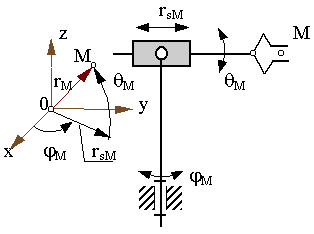
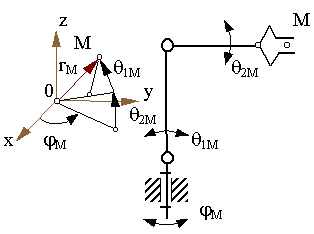
Системы координат руки манипулятора
Прямоугольная (декартова) Цилиндрическая

Сферическая Угловая (ангулярная)
Конструкция механизмов схватов роботов
Промышленные роботы применяются на самых разнообразных операциях и работают с деталями, резко отличающимися по прочности, массе, габаритам, конфигурации, расположению центра масс, шероховатости поверхности. Детали могут быть изготовлены из различных металлов, керамики, стекла, пластмассы. Это могут быть и массивные поковки и крупногабаритная тара из пластмассы, стальные листы, кирпич, листы из стекла и стеклянные трубки.
Один и тот же робот может транспортировать собранные узлы, тару с насыпанными мелкими деталями, емкость с жидкостью и, кроме этого, работать различным инструментом — распылителем, гайковертом, пневмоотверткой. Поэтому обычно для каждой модели робота создается большое число всевозможных схватов, которые при необходимости легко и быстро заменяются и монтируются на кисти. В некоторых конструкциях роботов схваты могут меняться автоматически в соответствии с записанной программой.
Классификация схватов промышленных роботов
механические с жесткими или пружинящими губками;
с вакуумными присосками;
с электромагнитами;
с сенсорными датчиками;
прочие схваты, в том числе схваты, несущие инструмент.
Механический схват
В качестве приводов механических схватов используются гидро- и пневмоцилиндры, штоки которых через систему рычагов или других механизмов приводят схваты в действие.
К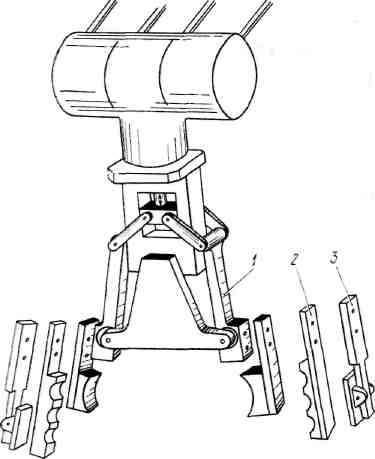 механическим схватам относится схват
с рычажно-кулисным приводом.
механическим схватам относится схват
с рычажно-кулисным приводом.
Рисунок 22 - Схват с рычажно-кулисным приводом: 1 — рычаг; 2,3 — губки
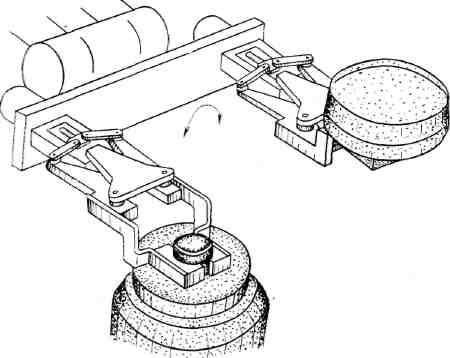
На рисунке 22 представлен схват с рычажно-кулисным приводом и сменными губками 2, 3 к нему. Для деталей, имеющих параллельные плоскости, применяются самоустанавливающиеся губки схвата 3. Если диаметр детали меняется после обработки, то используются губки 2 для деталей разных диаметров.
 С
данными схватами применяется кисть с
двойным схватом (применяется в тех
случаях, когда в процессе обработки
меняется форма и размеры детали).
С
данными схватами применяется кисть с
двойным схватом (применяется в тех
случаях, когда в процессе обработки
меняется форма и размеры детали).
Рисунок 23 - Кисть с двумя схватами
Для работы с длинными и тонкими трубками используется схват с пневмоцилиндром (рис.24). При включении пневмоцилиндра - 2 пальцы - 1 и 4 двигаются по дуге, пока не встанут перпендикулярно оси трубки, далее они входят в трубку и зажимают её.
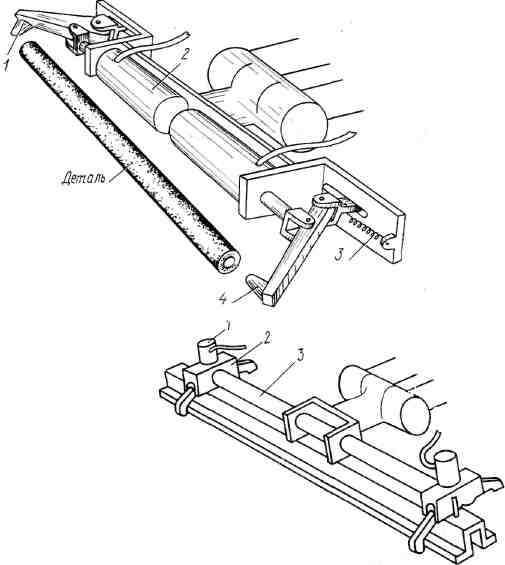
Рисунок 24 - Схват для длинных тонких труб: 1,4 — палец; 2 — пневмоцилиндр; 3 — пружина
Схват с пневмоприводом используется для работы с длинномерными деталями, имеющими в сечении неправильную форму. Кисть с подобными схватами показана на рисунке 25. Кисть имеет длинную балку - 3, на концах которой смонтированы два схвата - 2, имеющих по одному приводному пневмоцилиндру - 1.
Рисунок 25 - Схват для длинномерных деталей: 1 — пневмоцилиндр; 2 — схват; 3 — балка
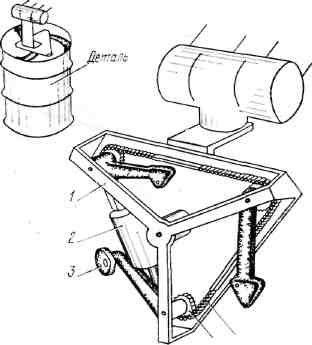 Для
переноса больших полых цилиндрических
деталей, например емкостей, изготовленных
из пластмасс, применяется схват, имеющий
конструкцию звездочки, схема которого
показана на рисунке 26.
Для
переноса больших полых цилиндрических
деталей, например емкостей, изготовленных
из пластмасс, применяется схват, имеющий
конструкцию звездочки, схема которого
показана на рисунке 26.
Рисунок 26 – Схват для полых цилиндрических деталей
В углах рамы - 1 на осях установлены три звездочки - 4. На осях звездочек вместе с ними установлено три одинаковых кулачка - 3. Звездочки - 4 охватываются цепью.