

1.1.2 Основные сведения из кинематики
Кинематикой называется раздел механики, в котором изучаются геометрические свойства движения тел без учета их массы и действующих на них сил.
1.1.2.1 Способы задания движения точки
Для задания движения точки можно применять один из трех способов: векторный, координатный, естественный.
Векторный способ.

Путь точка М
движется по отношению к некоторой
системе отсчета Oxyz.
Положение этой точки в момент времени
можно определить, задав ее радиус-вектор
![]() .,
- переменный вектор (вектор-функция),
зависящий от аргумента t
(времени)
.,
- переменный вектор (вектор-функция),
зависящий от аргумента t
(времени)
![]() .
Это равенство и определяет закон движения
точки в векторной форме. Аналитически
вектор задается его проекциями на
координатные оси.
.
Это равенство и определяет закон движения
точки в векторной форме. Аналитически
вектор задается его проекциями на
координатные оси.
В декартовых координатах
![]() ,
,
где
![]() - единичные векторы (орты).
- единичные векторы (орты).
Координатный способ задания движения точки. Чтобы знать положение точки в пространстве в любой момент времени, надо знать зависимости
![]() .
.
Это уравнения движения точки в прямоугольных декартовых координатах.
Естественный способ.
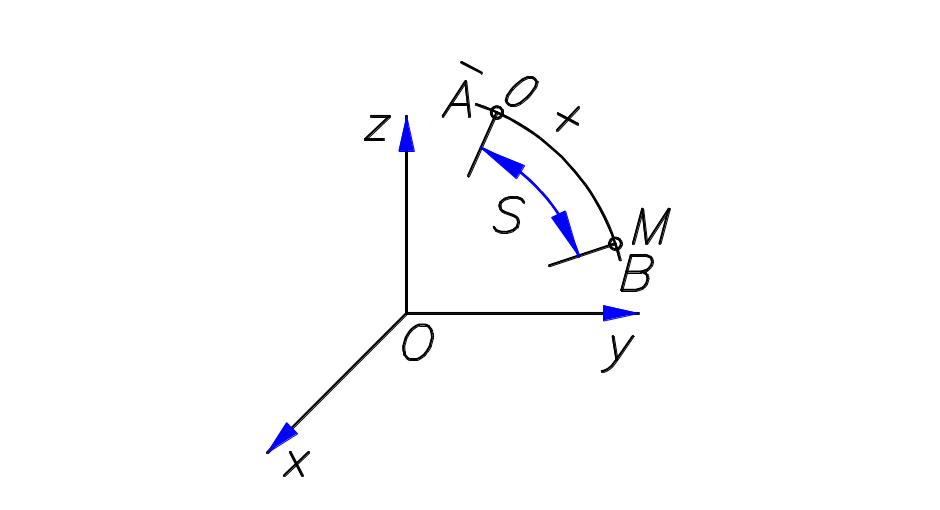
Естественным (или траекторным) способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее.
На траектории АВ выбирают точку О за начало отсчета и измеряют от нее дугу S
![]() .
.
Это и есть закон движения точки М вдоль траектории.
1.1.2.2 Скорость и ускорение точки
Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки.
Вектор скорости точки в данный момент времени равен первой производной от радиуса-вектора точки по времени
![]() .
.
Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки.
Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени
 .
.
1.1.2.3 Решение задач кинематики точки
Ограничимся рассмотрением одного примера. Движение точки задано уравнениями:
![]() ,
,
![]()
в системе СИ (м, с). Определить траекторию, скорость и ускорение точки.
Решение: Сначала исключим из уравнений t.
Для этого обе части первого уравнения умножим на 3, второго - на 4, а затем почленно вычтем из первого уравнения второе.
Получим
![]() ,
или
,
или
.
Следовательно,
траектория - прямая линия, проходящая
через начало координат под углом с
![]() .
.
Для определения проекций скорости на оси координат берем первые производные от исходных уравнений по времени
![]() ,
,
![]() .
.
Тогда
![]() м/с.
м/с.
Аналогично находим вторые производные и ускорение.
![]() ,
,
![]() ,
,
![]() м/с2.
м/с2.
Направлены
векторы
![]() и
и
![]() вдоль траектории. Подставляя в уравнение
скорости t от 0 и более,
убедимся, что при t >
1 скорость изменит направление. Есть
еще движение тела - вращательное,
плоскопараллельное [1, с.117-147].
вдоль траектории. Подставляя в уравнение
скорости t от 0 и более,
убедимся, что при t >
1 скорость изменит направление. Есть
еще движение тела - вращательное,
плоскопараллельное [1, с.117-147].
1.1.3 Основные сведения из динамики
Динамикой называется раздел механики, в котором изучается движение материальных тел под действием сил. В основе динамики лежат законы, открытые И. Ньютоном (1687 г)
1.1.3.1 Законы динамики [1, с.181-184]
Первый закон
(закон инерции): Изолированная от внешних
воздействий материальная точка сохраняет
свое состояние покоя или равномерного
прямолинейного движения до тех пор,
пока приложенные силы не заставят ее
изменить это состояние. Второй закон
(основной закон динамики) устанавливает,
как изменяется скорость точки при
действии на нее какой-либо силы:
произведение массы материальной точки
на ускорение, которое она получает под
действием данной силы, равно по модулю
этой силе, а направление ускорения
совпадает с направлением силы
![]() .
Третий закон (закон равенства действия
и противодействия): Две материальные
точки действуют друг на друга с силами,
равными по модулю и направленными вдоль
прямой, соединяющей эти точки, в
противоположные стороны.
.
Третий закон (закон равенства действия
и противодействия): Две материальные
точки действуют друг на друга с силами,
равными по модулю и направленными вдоль
прямой, соединяющей эти точки, в
противоположные стороны.