

Лекция 6
Раздел II. Кинетика
Общие понятия и аксиомы кинетики. Простейшие действия с силами и системами сил.
Вопросы лекции.
Общие понятия кинетики.
Аксиомы (законы) динамики.
Силы и системы сил.
Аксиомы статики.
1. Общие понятия кинетики.
Кинетика — раздел теоретической механики, изучающий законы механического движения с учетом механического взаимодействия, т.е. причин, вызвавших данное механическое движение.
Другими словами, в кинетике даются ответы на вопросы: почему материальная точка движется по параболе; при каких условиях твёрдое тело будет совершать плоскопараллельное движение; при каких условиях твёрдое тело будет двигаться поступательно равномерно и прямолинейно, или оставаться в покое; и т.п.
Таким образом, в кинетике наряду с геометрическими свойствами механического движения, изученными в кинематике, учитываются и механические взаимодействия.
Напоминание: механическое взаимодействие – это такое взаимодействие, в результате которого изменяется механическое движение объекта. Количественной мерой механического взаимодействия является сила.
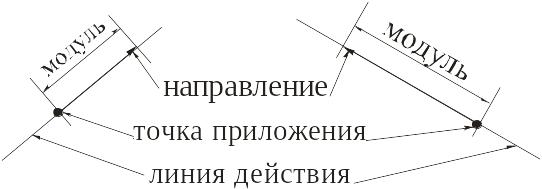
Сила – векторная величина, определяемая
1) модулем;
2) направлением;
3) точкой приложения;
4) линией действия.
Сила может быть представлена геометрически (на рисунке)
 .
.
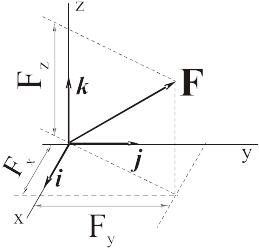
Силу (как и любой другой вектор) можно представлять аналитически. Для этого нужно выбрать три взаимно перпендикулярных единичных вектора

(предполагается, что их направления заданы, например, на юг, на восток и вверх, или каким-то иным способом). С этими единичными векторами обычно связывают координатные оси x, y, z соответственно, а введённые векторы задают положительные направления этих осей.
Тогда вектор силы определяется тройкой чисел
 11\* MERGEFORMAT ()
11\* MERGEFORMAT ()
которые
равны проекциям вектора силы не
соответствующие оси (на направления
единичных векторов
 ):
):
 .
.
Если в выражении (1) все три числа заданы, то модуль силы определится по формуле
 22\* MERGEFORMAT ()
22\* MERGEFORMAT ()
а направление найдётся с помощью направляющих косинусов: косинусов углов, которые образует вектор с положительными направлениями осей:
 33\* MERGEFORMAT ()
33\* MERGEFORMAT ()
где F – модуль силы (2).

Замечания.
1) При аналитическом задании вектора
силы точка её приложения указывается
отдельно, например, с помощью координат
 ,
а вектор силы определяется равенствами
(1) – (3), т.к. систему координат всегда
можно параллельно перенести в любую
точку.
,
а вектор силы определяется равенствами
(1) – (3), т.к. систему координат всегда
можно параллельно перенести в любую
точку.
2) Вектор силы вместо (1) можно записывать в виде
 44\* MERGEFORMAT ()
44\* MERGEFORMAT ()
что часто используется на практике. Коэффициенты при единичных векторах в (4) – то же самое, что и в (1): проекции вектора на соответствующие оси.
3)
Часто при задании вектора силы указывается
угол
 между вектором силы и плоскостью Oxy,
и угол
между вектором силы и плоскостью Oxy,
и угол
 между проекцией силы на плоскость Oxy
и осью Ox.
между проекцией силы на плоскость Oxy
и осью Ox.
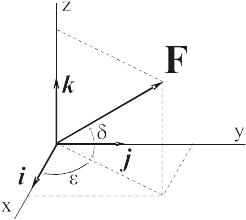
Тогда для определения проекций (1) сначала проектируем силу на плоскость Oxy

а затем на оси x и y:

Проекция силы на ось z находится сразу:

Сравнивая полученные выражения с равенствами (3) можем заключить, что
Остальные понятия кинетики ничем не отличаются от понятий, введённых ранее в кинематике:
физические объекты те же самые: материальная точка, механическая система и абсолютно твёрдое тело;
движение
происходит в трёхмерном евклидовом
пространстве с течением времени, причём
 ;
;
все кинематические характеристики движения точек и твёрдых тел определяются методами кинематики;
связь – это любое ограничение на механическое движение.
Кинетику можно подразделить на две части: статику, изучающую правила действия с силами и законы частного случая механического движения – равновесия, и динамику, изучающую законы произвольного движения под действием произвольных сил.