

111Equation Chapter 1 Section 1лекция 5
Сложение скоростей и ускорений точки при сложном движении
Вопросы лекции
Сложение скоростей точки.
Сложение ускорений точки (кинематическая теорема Кориолиса).
Ускорение Кориолиса.
Сложение скоростей точки.
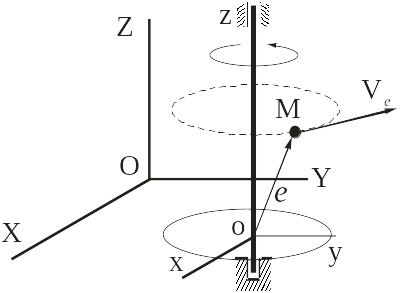
Согласно рисунку прошлой лекции
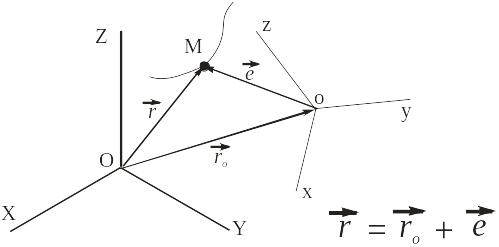
имеем
 22\* MERGEFORMAT ()
22\* MERGEFORMAT ()
(абсолютный радиус-вектор точки равен сумме абсолютного радиус-вектора начала подвижной системы координат и относительного радиус-вектора).
По определению абсолютной скорости

Ясно, что

вектор абсолютной скорости точки о начала подвижной системы координат oxyz.
Второе слагаемое представляет абсолютную производную от относительного радиус-вектора. Применяем формулу Бура
По определению

относительная скорость точки.
Следовательно, получаем
 33\* MERGEFORMAT ()
33\* MERGEFORMAT ()
Выражение
в скобках по определению есть переносная
скорость точки (скорость полюса о плюс
скорость точки тела при вращении вокруг
полюса; модуль
 )
)
 44\* MERGEFORMAT ()
44\* MERGEFORMAT ()
Окончательно можем записать
 55\* MERGEFORMAT ()
55\* MERGEFORMAT ()
т.е. абсолютная скорость точки равна векторной сумме относительной и переносной скоростей.
При произвольном переносном движении переносная скорость определяется по формуле (3). Равенство (4) можно записывать в форме (2), расписывая переносную скорость сразу в явном виде.
Частные случаи переносного движения.
Переносное движение поступательное (подвижная система oxyz движется относительно неподвижной OXYZ поступательно). В этом случае
 ,
и для переносной скорости из (3) получаем
,
и для переносной скорости из (3) получаем
 66\* MERGEFORMAT ()
66\* MERGEFORMAT ()
т.е. при поступательном переносном движении переносная скорость точки М в любом её положении равна скорости начала «о» подвижной системы координат.
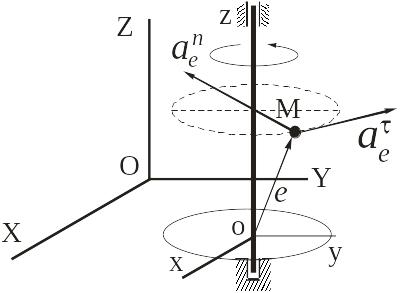
2) Переносное движение вращательное. В этом случае всегда можно начало отсчета «о» подвижной системы выбрать на оси вращения, а одну из координатных осей (например, ось z) направить вдоль оси вращения. Тогда из (3) следует
 77\* MERGEFORMAT ()
77\* MERGEFORMAT ()
т.е. переносная скорость определяется как при вращательном движении тела по формуле Эйлера.
В остальных случаях переносного движения переносную скорость следует определять по общей формуле (3).
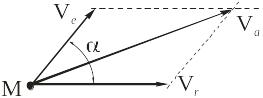
Так как согласно (4) при определении абсолютной скорости складывается два вектора, то определять модуль абсолютной скорости можно двумя способами.
Первый – по теореме косинусов имеем
 88\* MERGEFORMAT ()
88\* MERGEFORMAT ()
Выражение
(7) является универсальным. При
= 0 ( )
получаем
)
получаем


При
= 180
( )
будет
)
будет
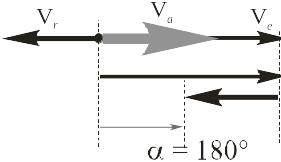
Направлен
вектор
 в сторону большей по модулю скорости.
в сторону большей по модулю скорости.
При
= 90
( )
получим теорему Пифагора
)
получим теорему Пифагора

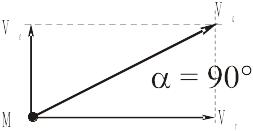
При использовании этого способа направление вектора абсолютной скорости находится геометрически (на картинке).
Второй способ. Выбирается какая-либо система координат (можно OXYZ, можно oxyz, можно – любую другую систему). Равенство (4) проектируется на выбранные оси:

тогда модуль абсолютной скорости
Замечание.
Так как векторы
 – скорости точки М (векторы «исходят»
из одной точки), то они всегда
лежат в одной плоскости,
поэтому, выбирая
систему координат соответствующим
образом,
равенство (4) всегда достаточно
спроектировать лишь на две оси координат,
а не на три.
– скорости точки М (векторы «исходят»
из одной точки), то они всегда
лежат в одной плоскости,
поэтому, выбирая
систему координат соответствующим
образом,
равенство (4) всегда достаточно
спроектировать лишь на две оси координат,
а не на три.
Сложение ускорений точки при сложном движении (кинематическая теорема Кориолиса).
По определению

Учитывая,
что абсолютная скорость точки определена
равенством (2), подставим его в формулу
для
 и вычислим производную по всем правилам
дифференцирования. Тогда
и вычислим производную по всем правилам
дифференцирования. Тогда
По определению

абсолютное ускорение точки «о» начала подвижной системы координат (абсолютная производная от абсолютного вектора). Далее

угловое ускорение подвижной системы координат (производная от угловой скорости не зависит от системы координат).
Векторы
 и
и
 заданы в подвижной системе координат,
а надо вычислить абсолютные производные.
Применяем формулу Бура:
заданы в подвижной системе координат,
а надо вычислить абсолютные производные.
Применяем формулу Бура:

В силу этих выражений последнее слагаемое в равенстве для абсолютного ускорения запишется

Учитывая, что
относительная скорость точки, а

относительное ускорение точки (по определению), и подставляя все полученные выражения в формулу для , получим после перегруппировки слагаемых

По определению выражение в скобках
 99\* MERGEFORMAT ()
99\* MERGEFORMAT ()
это переносное ускорение точки (ускорение полюса «о» плюс ускорение точки при вращении вокруг полюса при постоянном модуле вектора ).
Кроме того, в выражении для появилось третье слагаемое
 1010\* MERGEFORMAT ()
1010\* MERGEFORMAT ()
которое зависит от угловой скорости вращения подвижной системы координат и от относительной скорости точки и называется поворотным, или кориолисовым ускорением точки. Это ускорение будет подробно рассмотрено позже.
С учётом вышесказанного можем окончательно записать
 1111\* MERGEFORMAT ()
1111\* MERGEFORMAT ()
т.е. абсолютное ускорение точки равно сумме трёх ускорений: относительного, переносного и кориолисова (кинематическая теорема Кориолиса).
Частные случаи переносного движения.
1)
Переносное
движение – поступательное.
В этом случае
 и из формул (8) и (9) следует
и из формул (8) и (9) следует

Следовательно, формула сложения ускорений (10) превращается в
 1212\* MERGEFORMAT ()
1212\* MERGEFORMAT ()
Объяснение такое же, как и в случае скорости: при поступательном движении подвижной системы координат, как твёрдого тела, относительно неподвижной ускорения всех связанных с ней точек в любой момент времени равны между собой и равны ускорению начала «о».
2)
Переносное
движение – вращательное.
Аналогично сложению скоростей, начало
«о» выбираем на оси вращения. Тогда
составляющие переносного ускорения
 и
и
 определяются как при вращательном
движении тела. Следовательно, при
переносном вращательном движении можем
записать:
определяются как при вращательном
движении тела. Следовательно, при
переносном вращательном движении можем
записать:
 1313\* MERGEFORMAT ()
1313\* MERGEFORMAT ()
Модули и направления этих составляющих находятся так же, как и при вращательном движении тела; следует только определять расстояние от текущего положения точки М до оси вращения.
Кориолисово ускорение в этом случае находится по общей формуле (9).
В остальных случаях переносного движения (плоскопараллельном, сферическом и свободном) переносное и кориолисово ускорения находятся по общим формулам (8), (9).