2 . Уравновешивание сил инерции
Силы действующие в точках А и В — Риа,Pив:
Pиа = ma Wa=
Pив = mв Wв;
Pив17=
Pив26=
Pив35=
Pив4=
Pив8=
Усилие, с которым действует на стойку фундамент точке 0:
Рио=Риа+Рив
Полная масса противовеса:
mпр=
(ma+k
mn)![]() =
k
- коэффициент уравновешивания сил
инерции ползуна k=0,
=
k
- коэффициент уравновешивания сил
инерции ползуна k=0,
Требования и рекомендации
Рассчитать замещающие массы механизма, сосредотачиваемые в точках А и В.
ma
=
m1![]() 0.5+m2
0.65=
0.5+m2
0.65=
mb = m3+0.35 m2=
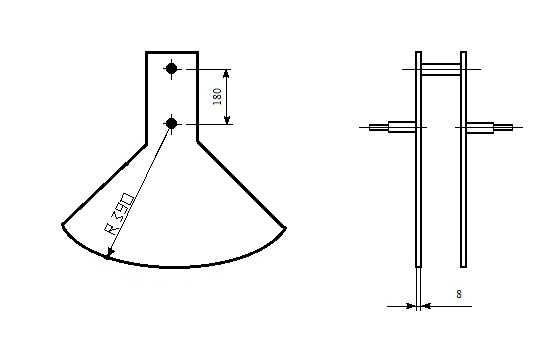
Рассчитать mпр по формуле при ОЕ=1,5 =0, м
Построить векторный треугольник для восьми положений механизма без протиовеа. Величины сил Риа,Рив подсчитав по формулам выше. Через концы векторов Рио провести плавную кривую годограф. Величину масштабного коэффициента принять (при Риа= мм):
Kp
= ![]() =
=
Перечисленное в пункте 2 сделать, используя уравнение:
Рио=Риа+Рив
+Рипр
,где
Рипр
= mпр
![]()
Рассчитать конструктивные размеры противовеса (при а=120, р= 7,8-103 ):
Rn=![]() =
=
![]() =
=
Qn=![]() =
=![]() =
=
3 . Выравнивание угловой скорости вала машины с помощью маховика.
Работы движущих сил и сил полезного сопротивления одни и те же промежутки времени оказываются неравными. Разность их, называемая избыточной работой, переходит в кинематическую энергию и вызывает изменение скоростей звеньев машины, в том числе и главного вала — кривошипа. Поэтому необходимо выдержать изменение угловой скорости главного вала, задаваемые степенью неравномерностью хода:
δ= [ω1max + ω1min ] / [ω1ср]
Для этой цели служит маховик-накопитель кинетической энергии, расчет которого является итогом этой части работы. Такой расчет буду вести графоаналитическим методом по способу Витенбауэра. Момент инерции механизма, приведенный к кривошипу, определяется массами звеньев механизма и зависит от текущего положения. Для исследуемого механизма справедливо:
JIIm = ma *(Va / ω1 ) 2 + mпр * (VЕ / ω1 ) 2 + Jk + (Jg +Jш )*( nэ / n1) 2 + mB *(VB / ω1 ) 2 [кг/м2]
И нтегрируя
это уравнение, получаем:
нтегрируя
это уравнение, получаем:
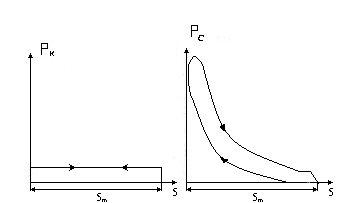
А1= (((JIm + JIIm)oi *ω2)/2) + C0 [Дж]
В системе координат А – JM уравнение представляется замкнутой кривой которая называется диаграммой энергомасс или диаграммой Витенбауэра. Эта кривая на графике будет лежать между лучами, проведенными из начала координат под углами:
Ѱ max = 17,22
Ѱ min = 16,96
Требования и рекомендации
Графическое построение к разделу уравновешивания сил инерции выполнены на листе чертежной бумаги формата А1 в следующем объеме:
1) Были вычерчены индикаторные диаграммы давлений q=q(S) на ползун в полостях правого и левого рабочего цилиндра.
2) Используя индикаторные диаграммы, вычислила силу Р, действующую на ползун машины, для принятых ранее восьми положений механизма.
3) Для всех положений механизма вычислила величину приведенного момента М на кривошипе от силы Р, действующей на ползун.
4) Построена кривая М=М(Ѱ)
5. Методом графического интегрирования была построена диаграмма работы А=А(Ѱ) приведенного момента М. В этой же системе координат построена диаграмма работы ∆А=∆А(Ѱ) момента М, действующего на вал кривошипа.
6 )
Была построена кривая избыточной работы,
используя годографы равнодействующей
сил инерции планы скоростей и ускорений,
было найдено Рио,
для всех положений механизма по формуле
∆А=∆А(Ѱ).
)
Была построена кривая избыточной работы,
используя годографы равнодействующей
сил инерции планы скоростей и ускорений,
было найдено Рио,
для всех положений механизма по формуле
∆А=∆А(Ѱ).
7) Была вычислена величина приведенного момента инерции механизма и построена кривая Jпр=J(Ѱ)
8) На диаграмме энергомасс под углами Ѱ max и Ѱ min были проведены касательные к кривой А=А(Ѱ).
9) Была определена процентная ошибка вычислений по формуле:
δр= [ωmax + ωmin ] / [ωср]
ωср= [ωmax + ωmin ] / 2
10) Результаты расчетов и построений внесены в таблицу:
Обознач. |
Ед. изм. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
P |
Н |
|
|
|
|
|
|
|
|
M* |
Н*м |
|
|
|
|
|
|
|
|
M |
H*м |
|
|
|
|
|
|
|
|
M |
мм |
|
|
|
|
|
|
|
|
∆А |
мм |
|
|
|
|
|
|
|
|
∆А |
Дж |
|
|
|
|
|
|
|
|
JIIm |
Кг*м2 |
|
|
|
|
|
|
|
|
JIIm |
мм |
|
|
|
|
|
|
|
|
ω1 |
c-1 |
|
|
|
|
|
|
|
|