

Билет№12
1. Геодезические способы, приборы и оборудование для установки конструкций по высоте. Геометрическое нивелирование короткими лучами, гидростатическое нивелирование, микронивелирование. Микронивелирование . Для приведения в горизонтальное положение опорных плоскостей применяют монтажные уровни с ценой деления 20// (0.1 мм на 1м ) и 10// (0.5мм 1м ) . Более точная установка выполняется с помощью особых микронивелиров , представляющих особые наклонные уровни большой длины с ценой деления уровня 5// . Гидростатическое нивелирование основано на принципе свободная поверхность жидкости всегда устанавливается нормально к направлению силы тяжести и в сообщающихся сосудах расположенных на одном уровне . Превышение точки в нем определятся по поверхности жидкости. Основные источники ошибок : 1 Неравновесие жидкости в сосудах и влияние явлении капиллярности. 2 Не точность контактирования острия винта и миниски жидкости. 3 Влияния ошибок установки прибора на нивелирной поверхности. 4 Влияние перепадов давления и температуры. Гидростатические приборы могут обеспечивать измеримые превышение на станций со СКО 0.02-0.03 мм. Максимальное расстояние между точками = 30 м ,диапазон измерения превышении 100 мм. Геометрическое нивелирование короткими лучами . Применяется при изучении осадок фундаментов и строительной конструкции многих видов сооружении . Этим методом можно определить разность высот двух точек расположенных на расстоянии 10-15 м , СКО 0.03-0.05 мм , несколько сотен метров определяется СКО 0.1-0.2 мм .Такая точность достигнута в результате применении ряда мер по ослаблению отдельных источников ошибок : 1 Тщательный отбор приборов для нивелирования. Наибольшую точность обеспечивает уровенные нивелиры с плоскопараллельной пластинкой типа Н1 и компенсационные Ni 007 , Ni 002 . 2 Тщательное определение цены деления головки микрометра на различные его участках, с помощью измерительных микроскопов. 3 Изготовление специальной прецизионной подставки позволяющие плавно менять высоту прибора . 4 Изготовление специальных визирных целей в небольшой степени способствующих повышению точности отсчитывания . 5 Защита нивелиров от теплового воздействия в условиях открытого воздуха специальным теплозащитным кожухом => Стабилизация значение угла i более чем в 2 раза.
|
2. Прямые и обратные задачи космической геодезии. Основное уравнение космической геодезии. Методы космической геодезии. Основное
уравнение кос. геод.
r-геоценрическии вектор спутника; ρ-топоцентрическии вектор спутника; R- геоценрическии радиус-вектор наблюдения Прямая задача кос. геод. определение r Обратная
задача кос. геод
Для успешного решение задач необходимо : 1 Знать точные эфемериды спутников, должна быть теория движения и хороший матем. аппарат. 2 Должна быть сеть опорных пунктов на земле, с учетом возможных изменении коор-т . Методы кос. геод. 1 Геометрическии метод (рассматривается ИСЗ как геометрия точки с известными коор-ми)
DA, DB –Синхронные наблюдения спутника m c пунктов А, В Основное уравнение КГ: RА = rА – ρA RB = rB – ρB r=r RА - RB = ρB - ρA = ΔR Можно получить взаимное положение двух пунктов не зная координаты спутника, спутник как высокая визирная цель. Если RА – исходный, RB = RА – ΔR – определенный То координаты пункта В будут получаться в системе координат пункта А Достоинства метода: Нет необходимости теории движения ИСЗ Недостатки: - сложность одновременного наблюдения - координаты пунктов не в геоцентрической системе, а системе координат исходного пункта - геометрическим методом невозможно изучать гравитационное поле земли, ее размеры и формы т.е. решать научные задачи
|

 определение коор-т пункта
определение коор-т пункта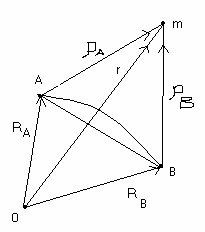
Билет №13
1. Геодезические способы для установки и выверки конструкций по вертикали. Прямые и обратные отвесы, способ наклонного визирования, способ оптического вертикального проектирования. Нитяной отвес-Наиболее простая установка, чтобы ослабить колебания нитяного отвеса, используют тяжелые отвесы. Нить отвеса подвешивают к оголовке конструкции на небольшой консоли(10-15 см), приваренной или привинченной к колонне, и линейкой измеряют расстояние от грани колонны до нити отвеса вверху и в основании, по разности которых определяют линейную величину наклона , применяют для предваритительного монтажа конструкции. Наклонным
лучом
прибор
(теодолит) устанавливают на некотором
расстоянии от конструкции (высота
10-15 м, расстоянии 10-15 м ; высота 50-70 м,
расстояние 100-150 м) и тщательно
горинзонтируют. Визирную ось наводят
на нижнюю осевую метку, и поднимая
трубу ,отмечают точку на вверху
конструкции. Аналогичное проектирование
производят при другом круге и фиксируют
среднюю двух точек. Расстояние этой
точки от оси конструкции показывает,
насколько необходимо наклонить
последнюю в плоскости, параллельной
коллимационной, чтобы ее ось заняла
отвесное положение. При выверки
вертикальных осей проектируют при
двух кругах верхнюю осевую точку вниз
,но основание, отклонение ∆е
от проектного положения оси характеризует
линейную величину наклона конструкции
γ=
Оптический. Для построении зенит-прибором оптическойвертикали в намеченных направлениях оставляют в перекрытиях небольшие сквозной отверстия. Прибор центрируют над исходной опорной точкой, приводим линию визирования в отвесное положение . На монтажном горизонте выводим на оптическую вертикаль особые консольные марки. Часто вместо марок укрепляют прозрачные пометки с сеткой прямоугольных координат, по которым отсчитывают положение проектируемой вертикали. Для контроля и повышения точности установки отсчета по палетки производят при четырех положениях окуляра и фиксируют среднюю точку. От вынесенных по вертикали опорных точек развивают на монтажном горизонте необходимые сети микротрилатерации и производят вертикальную установку и выверку строительной конструкции.
|
2. Общие принципы определения координат пунктов и азимутов направлений по наблюдениям светил.
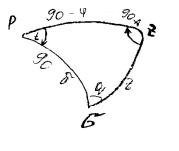
U QY – часовой угол точки весеннего равноденствия tγ =S U F - склонение δ U М- высота U γF = прямое восхождение U Qz – склонение зенита z Светило в горизонтальной системе координат (A,Z) U SM = A Z = 90 – h В I экватор.с.к. (t, ) Во II экватор.с.к. (, ) Известно, что географическая широта U = hp = z направление меридианов NS и звезд. время S = tγ = Z . В момент времени TH (момент наблюдений) могут быть определены, если для TH известны координаты зенита Z, то есть (, Z, z) можно определить относительно звезд следующими способами:
Все способы астроопределения географических координат делятся на две основные группы: зенитальные и азимутальные: В зенитальных способах широта и время (долгота) определяются по измеренным светилам или по разности зенитных расстояний или из наблюдения группы звезд. В азимутальных долгота и широта определяются по азимутам звезд или по наблюдению группы звезд по одному вертикалу. Формулы для определения времени; широты и азимута получают из решения параллактического треугольника
Можно определить поправку часов, если известно φ («фи») или широту и поправку местности, если известны поправки часов. |

 U
QF
– часовой угол t
U
QF
– часовой угол t
Билет№14
1. Исполнительные съемки и составление исполнительных генеральных планов. Виды исполнительных съемок. Геодезическая основа и методы исполнительных съемок сооружений и оборудования. Основное назначение исполнительных съемок – установить точность вынесения проекта сооружения в натуру и выявить все отклонения от проекта, допущенные в процессе строительства. Текущие исполнительные съемки отражают результаты последовательного процесса возведения отдельного здания или сооружения, начиная с котлована и заканчивая этажами гражданских и технологическим оборудованием промышленных зданий. Результаты этих съемок содержат данные для корректирования выполненных на каждом этапе работ и обеспечения качественного монтажа сборных конструкций. Исполнительная окончательная съемка выполняется для всего объекта в целом и используется при решении задач, связанных с его эксплуатацией, реконструкцией и расширением. Геодезической основой испол. съемки являются: 1. В приделах отдельных зданий, цехов, установок, закрепленные оси фундаментов и сети рабочих реперов. 2. В приделах строительной площадки пункты разбивочной основы, дополненной полигонометрическими и нивелирными ходами. И.с. обычно производится с пункта геодезического обоснования аналитическими способами: полярным, промерами по перпендикулярам и створам, линейными и угловыми засечками. Отметки точек определяют геометрическим нивелированием от ближайших реперов Методы. Для съемки положения строительных конструкций в плане применяют способы прямоугольных координат, линейных и створных засечек, линейные промеры от створов и т.п., по высоте – геометрическое нивелирование. Отклонение конструкций от вертикали проверяют с помощью отвесов, теодолитов, приборов вертикального проектирования. Применяют также фототеодолитную съемку. Методы съемки для испол. генплана зависят от масштаба его составления и вида снимаемого объекта. Составление исполнительных генпланов. Его составляют по результатам испол. съемок законченных зданий и сооружений комплексного объекта. Различают генпланы оперативные, дежурные и окончательные. Комплект окончательного испол. генплана состоит из сводного генплана в масштабах 1:1000 – 1:2000, а для особо крупных объектов – 1:5000; генеральных планов отдельных объектов в масштабах 1:200 - 1:500; специализированных исполнительных планов коммуникаций, дорог, линий электропередач; вспомогательной пояснительной документации. Исполнительный генплан составляют на планшетах стандартного размера или подрамниках, объединяющих несколько планшетов, в цветных условных знаков по общепринятым съемочным инструкциям
|
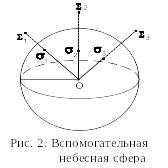
2. Небесная сфера. Основные точки, линии, круги, плоскости небесной сферы. Горизонтальная, экваториальная, географическая система координат. Вспомогательная небесная сфера – воображаемая сфера произвольного или единичного радиуса, на которую проецируются изображения небесных светил
Основные круги, точки и линии небесной сферы изображены на рис.3. Одним из основных направлений относительно поверхности Земли является направление отвесной линии, или силы тяжести в точке наблюдения. Это направление пересекает небесную сферу в двух диаметрально противоположных точках - Z и Z'. Точка Z находится над центром и называется зенитом, Z' – под центром и называется надиром. Проведем через центр плоскость, перпендикулярную отвесной линии ZZ'. Большой круг NESW, образованный этой плоскостью, называется небесным (истинным) или астрономическим горизонтом. Это есть основная плоскость топоцентрической системы координат. На ней имеются четыре точки S, W, N, E, где S - точка Юга, N - точка Севера, W - точка Запада, E - точка Востока. Прямая NS называется полуденной линией. Прямая PNPS, проведенная через центр небесной сферы параллельно оси вращения Земли, называется осью Мира. Точки PN - северный полюс мира; PS - южный полюс мира. Вокруг оси Мира происходит видимое суточное движение небесной сферы. Проведем через центр плоскость, перпендикулярную оси мира PNPS. Большой круг QWQ'E, образованный в результате пересечения этой плоскостью небесной сферы, называется небесным (астрономическим) экватором. Здесь Q - верхняя точка экватора (над горизонтом), Q'- нижняя точка экватора (под горизонтом). Небесный экватор и небесный горизонт пересекаются в точках W и E. Плоскость PNZQSPSZ'Q'N, содержащая в себе отвесную линию и ось Мира, называется истинным (небесным) или астрономическим меридианом. Это плоскость параллельна плоскости земного меридиана и перпендикулярна к плоскости горизонта и экватора. Ее называют начальной координатной плоскостью. Проведем через ZZ' вертикальную плоскость, перпендикулярную небесному меридиану. Полученный круг ZWZ'E называется первым вертикалом. Первая экваториальная система координат Основной круг первой экваториальной системы координат есть небесный экватор Q'KQ. Геометрические полюса небесного экватора - северный и южный полюсы мира, РN и РS. Начальный круг системы - небесный меридиан РNQ'РSQ. Начальная точка системы – верхняя точка экватора Q. Определяющий круг системы – круг склонения РNРS.
|
Вторая экваториальная система координат изображена Основной круг второй экваториальной системы - небесный экватор QQ'. Начальный круг системы - круг склонений точки весеннего равноденствия РNРS, называемый колюром равноденствий. Начальная точка системы – точка весеннего равноденствия .Определяющий круг системы – круг склонения РNРS. Первая координата - склонение светила . Вторая координата - прямое восхождение , двугранный угол между плоскостями колюра равноденствия и круга склонения светила, или сферический угол РN, или дуга экватора К: =дв.угол РNРS = сф.угол PN = К = = OK. Прямое восхождение выражается в часовой мере и отсчитывается от точки против хода часовой стрелки в направлении, противоположном видимому суточному движению светил, 0h 24h. Во второй экваториальной системе координаты и не зависят от суточного вращения светил. Так как эта система не связана ни с горизонтом, ни с меридианом, то и не зависят от положения точки наблюдения на Земле, то есть от географических координат и .
|
 Положение
любого светила
на небесной сфере определяется при
помощи двух сферических координат,
и :
x
= cos
cos,
y
= cos
sin,
z
= sin.1.2
Основные круги, точки и линии небесной
сферы
Положение
любого светила
на небесной сфере определяется при
помощи двух сферических координат,
и :
x
= cos
cos,
y
= cos
sin,
z
= sin.1.2
Основные круги, точки и линии небесной
сферы

Билет №15
1. Технология коррелатной версии метода наименьших квадратов уравнивания геодезических измерений. Коррелатный способ уравнивания по МНК. Пусть имеем n – измерений, из которых t – необходимые: y1, y2, y3…yn – количество выполненных измерений Y1, Y2, Y3…Yn – истинные значения найденных величин результатов измерений. Связь между ними может быть выражена: Yi + Δi = yi (1) Устанавливаем систему весов измеренных величин: P1, P2, P3…Pn Вычисляем обратный вес: П1, П2, П3…Пn Пi = 1/Pi (2) Подсчитываем число избыточных измерений: R = n-t (3) Каждое избыточное измерение приводят к математическому соотношению между истинными значениями измеряемых величин, т.е. в геодезической сети возникает r – условий. Φj (y1, y2…yn) = 0 (4) – исходная система условных уравнений связи. J = 1, 2, 3…r. Вследствие неизбежных ошибок в измерениях в те же функции, но от измеренных величин примут вид: Φj (y1+Δ1, y2+Δ2, …yn + Δn) = Φj (y1, y2…yn) = Wj (5) Это система условных уравнений связи от измеренных значений Wj – невязки, [Δi] = Wj (6) Отдельно каждую ошибку нельзя, но их совокупность в каждом условии может быть вычислена. Нужно найти к результатам измерения такие поправки, которые бы ликвидировали невязку, т.е. должно выполняться следующее равенство: [Vi]j = -Wj (7) Vi – поправки в результаты измерений, I = 1, 2…n. J = 1, 2…r. – по числу условий. Yiур = yi + Vi (8) Тогда система φj: Φj(y1ур, y2ур…ynур) = Φj (y1+V1, y2+V2…yn+Vn) = 0 (9) Это система условных уравнений связи от уравненных значений. В правой части получились 0. Систему (9) приведем к линейному виду, раскладывая в ряд Тейлора, пренебригая при этом малыми нелинейными членами разложения. Φj (y1+V1, y2+V2…yn+Vn) = = Φj (y1, y2…yn) + (dφj/dy1)V1 + (dφj/dy2)V2 +…+ (dφj/dyn)Vn = 0 (10) На основании (5) получим:
(dφj/dy1)V1 + (dφj/dy2)V2 +…+ (dφj/dyn)Vn + Wj = 0 (11)
Обозначим частные производные от первой функции по каждому Прод№13 результату измерений через ai. dφ1/dyi = ai, dφ2/dyi = bi, dφ3/dyi = ci
Система (11) с учетом (12) примет вид: A1V1 + a2V2 +…+ anVn + W1 = 0 b1V1 + b2V2 +…+ bnVn + W2 = 0 (13) r1V1 + r2V2 +…+ rnVn + Wr = 0 (13) – это система условных уравнений поправок. Wj – невязки, Ai, bi, ci – коэф – ты при поправках,Vi – неизвестные поправки, которые надо найти, решив (13). Но в (13) число поправок равно n, а число уравнений r, т.е. число уравнений r меньше числа неизвестных поправок (r<n). Такая система имеет множество решений, т.е. не решается однозначно. Чтобы выбрать из этого множества решений один наилучший вариант, который дает вероятнейшее решение нужно поставить дополнительные условия, которые являются принципом МНК (14): [pV2] = min (14) Тогда решая систему (13) под условием (14) переходят к системам нормальных уравнений коррелат. [Паа]К1 + [Пав]К2 + [Пас]К3 +…+ [Паr]Кr + W1 = 0 [Пав]К1 + [Пвв]К2 + [Пвс]К3 +…+ [Пвr]Кr + W2 = 0 (15) [Паr]К1 + [Пвr]К2 + [Пcr]К3 +…+ [Пrr]Кr + Wr = 0 В этой системе К1, К2…Кr – неизвестные коррелаты или дополнительные множители Лагранжа, которые вводятся искусственно в процессе перехода от системы (13) к (15). Их число r как число уравнений такая система решается однозначно. А способы решения могут быть различны:
Из решения (15) находятся неизвестные коррелаты, а по ним поправки Vi. Vi = Пi (aiK1 + biK2 +…+ riKr) (16) – коррелаты уравнений поправок. Контроль: [Vi]j = -Wj (17) Затем yiур = yi + Vi (18) Контроль: Φj (y1ур, y2ур…ynур) = 0 (19) Оценка точности по результатам уравнений выполняется по поправкам по формуле: μ = √[pVV]/r (20) Чтобы оценить конкретный элемент сети, например, отметку, коор-ту, угол необходимо этот элемент выразить математически и тогда ошибка функции будет: mF = μ√1/pF (21)
|
2. Уклонения отвесных линий. Способы определения составляющих уклонений отвесных линий. Нормальные и геодезические высоты. Области их применения. УОЛ – угол, образованный нормалью к поверхности эллипсоида вращения и отвесной линией. УО бывают: Абсолютные – угол, образованный отвесной линией и нормалью к общеземному эллипсоиду. Зависят от неравномерного распределения масс в теле земли. Относительные – угол, образованный отвесной линией и нормалью к референц-эллипсоиду. Зависят от размеров и ориентировки поверхности относимости. 1 для изучения фигуры земли; 2 для редуцирования измеренных величин с физической поверхности земли на поверхность эллипсоида вращения; 3 чтобы иметь возможность связывать астрономические и геодезические координаты: , B, L; 4 чтобы связать астрономические и геодезические азимуты: * А. Астрономическая широта – острый угол, образованный отвесной линией и плоскостью экватора. Астрономическая долгота – двугранный угол, образованный плоскостью Гринвичского меридиана и плоскостью астрономического меридиана данной точки. Плоскость астрономического меридиана – плоскость проходящая через отвесную линию данной точки плоскости земного экватора. Астрономический азимут – двугранный угол, образованный плоскостью астрономического меридиана точки и вертикальной плоскостью, содержащей отвесную линию и визирную цель. U – Уклонение отвеса ZГ – геодезический зенит ZА – астрономический зенит Р – полюс мира 1) U, 2) , ZГ G – проекция полного уклонения на геодезический меридиан или составляющая в плоскости геодезического меридиана ZА G – проекция полного уклонения отвеса на 1-й вертикал или составляющая в плоскости 1-го вертикала = U cos tg = / = U sin - прямая связь U = 2 + 2 – обратная связь Способы определения составляющих уконений отвесных линий. По результатам наземных измерений можно определить составляющие отвесных линий: 1 Астрономо-геодезический АГ = - В АГ = ( - L) cos Достоинство: - позволяет определить абсолютные и относительные уклонения отвеса Недостаток: - очень дорогой способ. 2 Гравиметрический g, g = g - - аномалия силы тяжести ГР = -1/2П 02П2П0 g Q cos A A d ; ГР = -1/2П 02П2П0 g Q cos A A d Достоинства:- очень дешевый способ; - можно получить абсолютное уклонение отвеса Недостаток:- нельзя на прямую получить относительное уклонение отвеса. 3 Астрономо-гравиметрический Этим способом можно получить астрономо-геодезические (относительные) уклонения отвесной линии. Чтобы их вычислить нужно, чтобы была создана геодезическая сеть редких астропунктов и гравиметрическая съёмка территорий. А, В, С – пункты геодезической сети, на которой выполняются астрономические определения, расстояние между ними 200 км Д – рядовой пункт геодезической сети Для точки А, В, С известны B, L, , АГ = - В; АГ = ( - L) cos Вокруг точки Д выполняем гравиметрическую съёмку R 300 km = АГ - ГР = АГ - ГР Внутри выделим ещё 1 область меньшего радиуса 0 R 1/2 R 0 – область в которой и изменяются по линейному закону при переходе от одной точке к другой = a1x + a2y + a0 = b1x + b2y + b0 a1, a2, a0 b1, b2, b0 Когда коэффициенты найдены можно найти уклонение отвеса для любого пункта. Для Д известно: Д, Д, АГ, ГР, ГР ДАГ = ДГР + ДГР ДАГ = ДГР + ДГР Нормальная и геодезическая высоты. Области их применения. Нормальная высота – высота, которая вычисляется по формуле HK = W0 – WK / Km (1) HK = 0K gdh / Km (2) K0 = экв0(1+ sin2 Bk) Km =K0 - / R*Hk d / dH = R В геометрическом смысле нормальная высота это отрезок нормали к эллипсоиду, заключенный между физической поверхностью земли и поверхностью квазигеоида. HK = HK + к Основные условия выбора системы счета высот: 1 высота не зависит от выбора трассы нивелирного хода; 2 высота вычисляется только по результатам измерений на физической поверхности земли без привлечения гипотез; 3 поправки в измеренные превышения за переход к выбранной системе счета высот малы; 4 высоты точек, лежащих на одной уровенной поверхности не одинаковы; 5 принятой системе счета высот соответствует достаточно простой способ вычисления геодезической высоты. Геодезической высотой точки называется расстояние НГ = mM между поверхностью эллипсоида и данной точкой, отсчитываемое по нормали к нему в этой точке. Точки, находящиеся выше поверхности эллипсоида, имеют положительные высоты, а ниже – отрицательные. Точки, лежащие на поверхности эллипсоида, имеют геодезические высоты равные нулю (НГ = 0). Геодезические координаты непосредственно измерены быть не могут, их получают путем вычисления и суммирования приращений координат относительно исходного пункта государственной геодезической сети, имеющего координаты B0, L0, H0.
|
Билет №16
1. Технология параметрической версии метода наименьших квадратов уравнивания геодезических измерений. Билет № 14 Параметрический способ уравнивания. Это способ абсолютного экстремума, при котором все измеренные величины представляют в виде функций некоторых независимых параметров. Параметрический способ уравнивания. 1 этап. Систематизация измерительной инф-ии и ее точности. Выбор независимых параметров уравнении и составление исходной системы параметрических уравнении связи. 2 этап. Линеаризация исходной системы уравнении связи и получение системы параметрических уравнении поправок. 3 этап. Получение системы нормальных уравнений. 4 этап. Решении системы нормальных уравнений получением МНК поправок. 5 этап. Вычисление МНК поправок к результатам измерении. 6 этап. Вычисление уравненных, вычисляемых параметров и уравненных измерении и контроль уравнивания.
|
2. Нивелирование. Способы нивелирования, их достоинства и недостатки. Методика полевых измерений при нивелировании II класса. Полевые контроли. Нивелирование – это работы, которые выполняются для нахождения высоты.
1 – основано на зависимости атмосферного давления высоты точки над уровнем моря ( с увеличением высоты на 10 м. давление подает на 1 мм. рт. ст. ) это точность не высокая. Область применения геология и геофизика. 4 – выполняют с помощью сообщающихся сосудов заполненных жидкостью. Самое высокоточное. 5
– перспективное, но точное (технические)
зная X,
Y,
Z
3 – это нивелирование, в котором h м/у двумя близкими точками определяются с помощью горизонтально – визирного луча и отвесно расположенных этих точках реек ( нивелирование горизонтальным лучом ). Достоинство: высокая точность на 1 км. хода 0.5 мм. Недостатки: 1. маленькая скорость передачи высоты. 2. большое количество человек в бригаде. 3. дорогостоящий. 4. не везде можно применить. 2 – нивелирование, в котором превышения м/у точек A и B определяются с помощью измеренного угла наклона и расстояния м/у точками. Достоинство:
Недостатки: низкая точность. Полевые контроли:
Нивелирование II класса выполняют методом совмещения. Уравненное превышение в ходе длиной 1 км определяют со средней квадратической случайной ошибкой не более 0,8 мм, а превышение на станции — 0,3 мм. Нормальная длина визирного луча — 65 м, а при увеличении зрительной трубы не менее 44х — до 75 м. Неравенство расстояний от ; нивелира до реек на станции — до 1 м, накопление в секции — не более 2 м. Высота визирного луча над почвой — не менее 0,5 м. При длине визирного луча 50 м и менее высота визирного луча может быть уменьшена до 0,3 м. Последовательность наблюдений на станции в прямом и обратном ходах на нечетных и четных станциях такая же, как и при нивелировании I класса.
|
Билет№17
1. Изложить содержание основной теоремы о распространении ошибок при математической обработке геодезических измерений. Дано: результаты измерений (случайного вектора Xk) Составим матрицу С, которая преобразует Xk в вектор Ym ,т.е. Ym=C Xk – линейное преобразование Xk Коваряционная матрица: Kx =E((X-E(X))(X-E(X))T) В векторе Ym результаты обработки вектора Xk по правилу С Найти Ky Эта теорема доказывает, если известна матрица Kx – ковариционную и правило С, то можем вычислить ковариционную матрицу результатов обработки по формуле Ky = С Kx СТ Если же преобразования общего вида, т.е. Y есть функция от X, Ky – есть частная производная от функции по результатам измерения: Y
= F(x);
Ky её диференцируют и находят частные производные. Например функции наиболее удаленных дирекционных углов, и величины непосредственных измерений, то в качестве функции берут коэффициенты уравнений, можно вывести и невязки Вопрос № 16 Средняя квадратическая ошибка единицы веса как совокупный показатель качества выполнения геодезических работ. Понятие
веса вводится в случае неравноточных
измерений одной или нескольких величин,
т.е. таких которые выполняются с разными
дисперсиями. Вес отражает степень
доверия к результату измерения и
определяется как величина обратно
пропорциональная квадрату
среднеквадратической ошибки Величина
ГС=
называется ошибкой единицы веса и
характеризует среднеквадратическую
ошибку реального или фиктивного
измерения, вес которого произвольным
выбором C
оказывается равным 1. С учетом введенного
получим:
|
2. Проекция и плоские прямоугольные координаты. Порядок редуцирования измеренных величин с поверхности эллипсоида на плоскость проекции Гаусса-Крюгера. Условия, предъявляемые геодезической проекции:
2.1 Минимальность искажений. 2.2 Простота и легкость учета искажений. 3.1 Графические материалы съемок должны сразу изучаться в принятой проекции. 3.2 При изучении съемочного обоснования желательно поправки вводить только в расстояния 3.1,3.2 – диктуют целесообразность использования в геодезии равноугольных проекций. С 30хгг используется проекция Гаусса – Крюгера как государственная. В этой проекции поверхность делится Разность долгот граничных меридиан 60 и 30. Нумерация 60 –х зон начинается от Гринвича и на восток, в отличии от α0 = 6n – 3 – долгота осевого меридиана зоны 60 α0 = 3к – для зон 30 n, k – номера зон
O1, O2 – точка пересечения осевого меридиана и экватора
Осевые меридианы изображены без искажений, экватор – прямой х = О2 К1 = КК1 у = О2 К2 = КК1 Неточность изображения Два раза изображаются меридианы осевые меридианы параллельны, а они сходятся на полюсах Х = 5320450м У = 110620 n - № зоны Покажем взаимное расположение 6˚ и 3˚ зон. Граничные меридианы изобразим прямыми линиями В северном 6˚ а в южном 3˚
|
Координаты половины точек не надо пере вычислять Для того чтобы уменьшить для пользователей преобразований координат работ. В России установлены зоны взаимного перекрытия шириной в 1˚. Для пунктов ГГС, попадающих в эту зону имеют 4 координаты в каталогах в западной зоне и в восточной. На листах топографических карт всех масштабов на территории перекрытия показываются выходы километровой сети смежной зоны, только осевой меридиан и экватор изображаются на плоскости прямыми линиями. Все остальные кривые изображаются на плоскости кривыми линиями – это недостаток этой проекции. Углы не искажаются поэтому образ касательной к изображению геодезической линии 12 и хордой 12 называют поправкой за кривизну изображения геодезической линии на плоскости. Дирекционный угол α называют угол, образованной от линии параллельной изображению осевого меридиана зоны и хордой γ =1 сближение меридианов в точке это угол, образованный касательной к изображению геодезического меридиана точки и линией параллельно осевому меридиану зоны α12= А12-γ1+δ12 3. Порядок редуцирования измеренных величин с поверхности эллипсоида на плоскости проекции Гаусса – Крюгера. Зависит от многих факторов:
В любом случае в алгоритме редуцирования выделяют 3 фактора: 1. Вычисление приближенных координат определенных пунктов. Для решения этой задачи используют нередуцированные или редуцированные грубо результаты измерений 2. Вычисление поправок во все измеренные величины 3. Введение поправок в измеренные величины и получение редуцированных на плоскость результатов измерений.
|
 -
частное
правило
-
частное
правило
 ,
где c
= const
– произвольное число, вводится для
удобства вычислений и подбирается
таким образом, чтобы значение
,
где c
= const
– произвольное число, вводится для
удобства вычислений и подбирается
таким образом, чтобы значение
 .
. чем >P,
тем <m,
тем выше точность. На основе этой
формулы могут быть получены:
чем >P,
тем <m,
тем выше точность. На основе этой
формулы могут быть получены:
 ;
;


Билет№18
1. Причины нарушения устойчивости геодезических пунктов. Выбор конструкции центра, места и способа его закладки. Особенности конструирования знаков для специальных инженерно-геодезических сетей. К основным причинам смещения геодез. пунктов местности: экзогенные, эндогенные и техногенные процессы. Под экзогенными понимают процессы связанные с воздействием таких внешних факторов как t0 и влажность, они изменяют гидротермический режим грунта, что в свою очередь ведёт к нарушению устойчивости геодез. центров и Rp. Если в мягкий грунт заложен стандартный центр – монолит с трубой. Монолит заложен на небольшую глубину в промерзающую толщу грунта. Под воздействием морозного пучения геод. центры испытывают вертик. смещения, но возможны и плановые сдвиги, это явл. следствием неравномерной осадки (подъёма) якоря знака. Плановые смещения до 5-10 мм. Эндогенные обычно распространяются на значительной территории, вызывают либо медленные, либо резкие (сейсмические) нарушения в положении земной поверхности. Медленные, практически безвредны для инж. соор. Повторные нив-я необходимы после сильных землятресений, особенно в районах в близи центра. Техногенные – деятельностью человека. Интенсивные откачки грунтовых подземных вод, добыча полезных ископаемых, строительство тоннелей и высотных сооружений, и т.д. – это причины нарушающие устойчивость грунтовых пунктов. При выборе мест установки знака надо обращать внимание: на выгоднейшие условия прохождения визир. луча; выдерживать в пределах длины примыкающих сторон или условия привязки к Rp; отток от знака поверхностных вод, на положение уровня грунтовых вод, минеральный состав грунта. При наличии выходов на поверхность или при близком их расположении к дневной поверхности скальных грунтов, то геод. центры надо устанавливать непосредственно на скале. В мягких грунтах, местами для закладки центров являются сухие возвышенные участки. На вечномёрзлых грунтах наилучшими следует считать участки, где в наименьшей степени нарушается температурный режим грунта (северная экспозиция склонов). На территории вечномёрзлых грунтов, якорь должен находится в толще вечномёрзлого грунта. В мягких сезонно промерзающих грунтах требуется чтобы якорь располагался в непромерзающем слое грунта. Геодез. знак состоит из двух частей: якорь – обеспечивает устойчивость знака и верхней части, несущей точку с известными координатами или репер с известной высотой. Якорь может представлять собой или бетонный монолит или бетонную плиту массой 100-150кг, с которой жёстко соединятся верхняя часть знака. Верхняя часть состоит из металлической трубы d=6-8см, армированного бетонного пилона пирамидального или призматического вида. В верхнем срезе трубы помещается марка фиксирующая центр или репер. Высота пилона или трубы определяется глубиной промерзания грунта. Плоскость нижнего основания якоря должна располагаться на 0.5м ниже границы max промерзания грунта, верхняя часть трубы на 0.5м ниже поверхности земли.
|
2. Приближенное определение широты по измеренным зенитным расстояниям Солнца. Определение азимута и долготы по наблюдениям Солнца.
Ti время наблюдения TL1, ВК1 TL2, ВК2
1пп кл 2пп кп 1) 2)
TR1, ВК3 TR2, ВК4 Берется среднее TLср = ½ (TL1 + TL2) BKLср = ½ (BK1+BK2) L BKRср = ½ (BK3+BK4) R TRср = ½ (TR1+TR2) TT4 hLcр = Lср hRср = 180 – L ср ZLср = 90 – hLср ZLср = 90 - hRср Вычисляем геоцентр, исправление за рефракцию и параллакс ZL,R=ZL,R+ρ+p ρ-рефракция P=P0sinZ; P0=из астрономического ежегодника Р-параллакс ρ
= 21.˝6 D = ¼(T1+…T4) U- поправка часов M=D+U-(h+x) X – время по приему сигнала N=X-Tкр К= M+∆T φL,R = mL,R+ nLR
|

 т.к.
способ зенитальный, то солнце наблюдается
2 раза
т.к.
способ зенитальный, то солнце наблюдается
2 раза
 ΄
t
=
΄
t
=




Билет№19
1. Автоматизированные системы крупномасштабного картографирования по материалам наземных измерений и аэросъемок. Автоматизированные системы картографирования ориентированы на весь комплекс работ по топосъемке местности , охватывал процессы получения съёмочных данных, их вычислительной обработки; формирования ЦММ и картографического отображения путём автоматизированного вычерчивания оригиналов. Они представляют собой совокупность методов, технических средств, технологий, программного обеспечения. В настоящее время в мире известно несколько десятков автоматизированных систем картографирования. Наибольшую известность получила автоматизированная система картографирования АСК-1. Она представляет собой комплексную автоматизированную топографическую систему для создания крупномасштабных карт, планов и ЦММ. Она осуществляет автоматизированный сбор топографической информации геодезическими, фотограмметрическими и картографическими методами, преобразование этой информации к пригодному для обработки на ЭВМ виду, автоматизированная обработка данных, формирование ЦММ и цифровых карт. В соответствии с функцией преобразования информации и с учетом организационных особенностей производство в АСК-1 структурно выделены 4 подсистемы: сбора цифровой топографической информации; первичной обработки информации; формализации информации; картографического отображения информации.
|
2. Системы измерения времени. Звездное время. Солнечное истинное среднее время. Время на различных меридианах. Поясное, декретное, всемирное время. Всемирное координированное время. Неравномерность вращения Земли. Неравномерность вращения. В основу измерения времени положено вращательное движение Земли вокруг своей оси. Это периодичное движение не ограничено во времени, непрерывно и достаточно равномерно. Для измерения времени может быть использован любой периодически повторяющийся процесс. Исторически сложились следующие системы времени:
В настоящее время шкалу времени создает Международная служба ”эталонного времени и частоты”. Оно ориентируется примерно на 40 национальных служб. Звездное время. Точка отсчитывания -
В шкале времени одни звездные сутки равны промежутку времени между двумя последовательными верхними кульминациями т. на меридиане i наблюдениями. Мерой измерения времени является центр - OQ = t =+t = s-часовой точки весеннего равноденствия. Солнечное время. Истинное солнечное время (mʘ)
dʘ=24h истинным солнечным часам. 1 минута истинного солнца = 60s истинного солнца dʘ истинного солнца = 1440m = 86400s
|
 -
величина переменная и меняется
-
величина переменная и меняется
Билет№20
1. Электронные теодолиты и тахеометры: принцип работы, устройство, программное обеспечение. Технология выполнения работ. Подсистема сбора цифровой топографической информации осуществляет процессы геодезических и фотограмметрических измерений, обследования территорий и дешифрирования аэрофотоснимков с целью выявления топосвойств местности, цифрового преобразования графических материалов. Результатом функционирования подсистемы является необходимая для создания карты дискретная информация о взаимно-пространственном расположении объектов местности и об их свойствах, подготовленная для ввода и обработки на ЭВМ. Сбор цифровой информации производится по картматериалам, аэрофотоснимкам и наземным методом. Подсистемы первичной обработки предназначены для ввода результатов съёмки в ЭВМ, формального контроля данных, вычисления плоских или пространственных координат точек в заданной системе, объединение отдельных точек в элементарные контуры. В процессе работы этой подсистемы осуществляется заполнение оперативной базы данных в виде массивов координат опорной геодезической сети, съёмочных данных, координат съёмочных пикетов. Контроль конечной продукции процессов сбора и первичной обработки осуществляется по контрольному чертежу. В функцию подсистемы формализации входит объединение многообразных топографической информации и приведение её к единому стандартному виду- ЦММ. Выходным результатом этой подсистемы является ЦММ, записанная в рамках листа и создаваемого плана или трапеции карты. Записанная в оперативную базу данных ЦММ в пределах трапеции формируется в виде 2-х частей; массива геометрической информации, определяющей свойства местных предметов, а также состав и взаимодействие ограничивающих их контуров. Для визуального контроля сформированной геометрической информации применятся контрольное вычерчивание контуров с возможностью изменения масштаба чертежа, а также вычерчивание точек, образующих конуры, номеров контуров и точек. Подсистемы картографического отображения обеспечивает преобразование цифровой топографической информации к картографическому виду. В переход от ЦММ к цифровой карте и затем её графическое воспроизведение с помощью ЭВМ и систем графического вывода. К функциям этой подсистемы относятся аппроксимация рельефа и интерполирование горизонтали, формирование моделей условных знаков и надписей, картографические операции по расположению ней осуществляется на оригинале, элементов содержания карты, формирование управляющей информации для графопостроителя и другие процессы. Результатом работы подсистемы является оригинал карты или плана. К высокоточным современным и высокопроизводительным геодезическим средствам измерений относится новое поколение приборов, позволяющих выполнить все измерения в автоматизированном режиме. Такие измерительные приборы снабжены встроенными, вычислительными средствами и запоминающими устройствами, создающими возможность регистрации и хранения результатов измерений, дальнейшее их использование на ЭВМ для обработки. Рочевой ввод топографо-геодезической информации в полевых условиях обеспечивает улучшение условий труда и уменьшение числа ошибок наблюдателя. Скорость ввода информации измерений значительно увеличивается по сравнению с вводом с помощью клавиш. Для автоматизации полевых измерений при производстве топографической съемки и других видов инженерно- геодезических работ созданы высокоточные электронные тахеометры (ЭТ). ЭТ содержит угломерную часть, сконструированную на базе кодового теодолита, светодальномер и встроенную ЭВМ. С помощью угломерной части определяются горизонтальные и вертикальные углы, светодальномеры- расстояние, а ЭВМ решает различные геодезические задачи обеспечивает управление приборов, контроль результатов измерений и их хранение. Примером может служить отечественный ЭТ ТаЗМ, с помощью которого можно определить: Горизонтальные углы с погрешностью 4˝; зенитное расстояние с погрешностью 5˝; наклонные дальности с погрешностью 10мм; горизонтальные проложения; превышения или высоты точек визирования; прирощения координат или координаты точек визирования. Прибор может работать при 4-х режимах: Раздельном, полуавтоматическом, автоматическом и режиме сложения. Геодезические задачи решаются с учетом поправок за кривизну земли, рефракцию атмосферы, температуру и давление, разность высот штативов прибора и отражателя. Информация об угловых значениях выдается в гонах или градусах. Датчик углов прибора- кодовые, накопительного типа. В Комплект ЭТ входит: отражатели, штативы, источники питания, разрядно- зарядное устройство, принадлежности для юстировки прибора и ухода за ним. ЭТ снабжен для работы ночью. Выдаваемое на цифровое табло оперативная информация может быть выведена в память ЭТ или внешний накопитель. Зарубежные фирмы выпускают ЭТ различные по точности измерения углов от 0.5˝ до 20˝, расстоянии от 2 до 10мм и с внутренней памятью до 10000 точек.
|
2. Невозмущенное движение искусственных спутников Земли. Законы Кеплера. Уравнение орбиты. Период обращения. Движение ИСЗ в около земном пространстве выделяется следующими факторами: 1.Внешнее гравитационное поле Земли. 2.Притяжение Луны и Солнца, атмосферное торможение, давление света. 3. Действие магнитного поля Земли (теория относительности Эйнштейна) Движение ИСЗ под действием тяжести Земли, если Земля имеет сферическую форму и равномерное распределение плотности, то такое движение получило название – невозмущенное. Свойства невозмущенного движения: 1.Движение спутника происходит в плоскости, ориентировка которой в пространстве остаётся без изменений. 2.Орбита спутника представляет собой замкнутую эллиптическую траекторию, которая в плоскости движения занимает неизменённое положение. Невозмущенное движение ИСЗ подчиняется 3 законам Кеплера: 1.Орбита спутника есть эллипс в одном из фокусов, которого находится центр масс земли. 2.Радиус вектор спутника за равные промежутки времени описывает равные площади. Скорость спутника неравномерна, чем ближе ИСЗ к Земле, тем > его скорость. 3.Отношение квадратов периодов обращения ИСЗ к кубам их больших полуосей, есть величина постоянная.
Уравнение орбиты:
r= период обращения: T2=
|

 r-уравнение
орбиты:
P-
фокальный параметр е- эксентрисетет
υ
– истинная анамалия
r-уравнение
орбиты:
P-
фокальный параметр е- эксентрисетет
υ
– истинная анамалия ,
,

Билет№21
1. Автономные средства определения положения пунктов (принцип работы, устройство, программное обеспечение, технология работ). Бурное развитие науки и техники позволило создать принципиально новый метод определения координат и приращений координат- спутниковые. В этом методе вместо привычных геодезистам неподвижных пунктов геодезической сети с известными координатами используются подвижные спутники, координаты которых можно вычислить на любой момент времени. В настоящее время используются две спутниковые системы определения координат: ГЛОНАСС (Россия) и Навстар GPS (США). Всю навигационную спутниковою систему определения местоположения принято делить на три сегмента: космический сегмент, сегмент контроля и управления, сегмент пользователей ( приемники спутниковых сигналов).Современная система НАВСТАР GPS и ГЛОНАСС в полной комплектации должна состоять из 21 действующего спутника и 3 запасных. Орбиты спутников практически круговые и расположены в 3 орбитальных плоскостях( для ГЛОНАСС) и 6 орбитальных плоскостях (GPS).Спутники оснащены солнечными батареями, которые обеспечивают энергией все системы, в том числе и во время прохождения спутника в тени Земли. Орбиты спутников практически круговые и расположены, на геодезической высоте, равной 20180 км и на расстоянии 26600км от центра. Земли. Такое количество спутников и их расположение обеспечивает одновременный прием как минимум от 4 спутников в любой части Земли. Все спутники равномерно расположены в 6 орбитальных плоскостях, период обращения спутников составляет 12 часов звездного времени, в связи с чем каждый спутник появляется в том же месте ежедневно на 4 минуты раньше вчерашнего положения. электроэнергией спутник обеспечивают дне солнечные батареи площадью 7.2 м2 каждая, заряжая также аккумуляторы для обеспечения работоспособности спутника во время его полета в тени Земли. Каждый спутник снабжен кварцевым стандартом частоты, двумя цезневоми и двумя рубидиевыми стандартами частоты: который поддерживают стабильность спутника в пределах 1*10-12 -1*10-13. Цезневые и рубидиевые стандарты частоты координируют и управляют основной частотой. - кварцевым стандартом частоты, генерирующим 1.23 МГц. Из основной частоты формируют две частоты диапазона частот с названием L-диапазон. Эти две частоты (называемые несущими) через модуляторы поступают на антенну и передают на Землю информацию. Информация накладывается на несущую частоту методом импульсной модуляции. Модуляция сигнала - это изменение какого-либо параметра электрического сигнала.. При импульсно-фазовой модуляциии Фаза сигнала скачком изменяется на 180º на частотах Li и L2 ,передаются навигационые сигналы (коды), а также другая навигационная и системная информация
|
2. Земной эллипсоид, его основные параметры и соотношения между ними. Системы геодезических (B,L,H) и пространственных (X, У, Z) координат. Основной задачей геодезии является изучение реально существующей физической поверхности Земли и ее внешнего гравитационного поля. Эта задача решается на основе математической обработки результатов спутниковых, астрономических, геодезических и гравиметрических измерений. По измеренным на земной поверхности углам и расстояниям вычислить с высокой точностью координаты точек не возможно, т.к. неизвестен вид сложной физической поверхности Земли. Целью измерений является определение поверхности. Поэтому в геодезии при решении задач, связанных с математической обработкой наземных измерений, вводится вспомогательная координатная поверхность, которая должна быть наиболее близкой по форме и размерам к действительной поверхности Земли и иметь достаточно простой математический вид, чтобы без затруднений выполнять на ней математическую обработку измерений. В качестве такой поверхности принята поверхность эллипсоида вращения, которая называется общим земным эллипсоидом. Эллипсоид вращения получен путем вращения эллипса вокруг малой оси. Два основных параметра эллипса: большая полуось а=ОЕ, малая полуось в=ОР. Полярное
сжатие Связь Геодезическая параллель – линия пересечения поверхности эллипсоида вращения и плоскости перпендикулярной оси вращения. Если плоскость сечения проходит через центр эллипсоида, то геодезическая параллель называется экватором. Геодезический меридиан – часть линии пересечения поверхности эллипсоида вращения и плоскости, содержащей ось вращения, заключенной между полюсами. Все меридианы одинаковы и являются половинками эллипсов. Для того чтобы задать эллипсоид, нужно задать 2 параметра, один из которых должен быть линейным, а остальные можно вычислить. Система прямоугольных пространственных координат За начало координат в этой системе принимается центр эллипсоида – О. Ось OZ направлена по полярной оси, ось ОХ расположена по линии пересечения плоскости Гринвичского меридиана и плоскости экватора. Ось OY дополняет систему до правой. Тогда положение точки Q на поверхности эллипсоида будет определено однозначно координатами: X=OQ1 Y =OQ2 Z=OQ3 Достоинства: 1. Координаты XYZ однозначно определяют положение точки в пространстве. 2. Для ее применения не нужен эллипсоид вращения. Недостатки: 1. Нельзя разделить XYZ. 2. Основная система координат – система плоских прямоугольных координат, но прямого перехода от XYZ к XY – нет. Данная система применяется в выводах формул для обработки спутниковых наблюдений. Система геодезических координат. В этой системе координат положение точки в пространстве определяется тремя координатами: Геодезическая долгота – это двугранный угол, составленный плоскостью начального геодезического меридиана и плоскостью геодезического меридиана проходящего через заданную точку. Долгота измеряется от 0 до 3600 или от 0 до 1800 на восток и запад от гринвичского меридиана. Но долгота определяет положение меридиана, проходящего через точку, а не саму точку. Для определения положения точки на меридиане используется широта. Геодезическая широта – это острый угол составленный плоскостью экватора и нормалью к поверхности эллипсоида, проходящей через заданную точку. Геодезическая широта обозначается буквой В. Широты отсчитываются от экватора к северу и югу и называются северными и южными. Пределы изменения от 0 до 900. Геодезическая высота – отрезок нормали от эллипсоида до точки. Достоинства:1. Координаты BLH однозначно определяют положение точки в пространстве. 2. Эта с.к. позволяет общую задачу по вычислению координат пунктов разделить на 2 подзадачи меньшей размерности. Отдельно определяют BL, отдельно Н. 3. эта система координат связана с системой плоских прямоугольных координат, которая является основной.
|
 Квадрат первого эксцентриситета
Квадрат первого эксцентриситета Квадрат второго эксцентриситета
Квадрат второго эксцентриситета


 ;
;
 ;
;
 Параметры эллипсоида: а=6378245м,
=1/298.9, 1/150.
Параметры эллипсоида: а=6378245м,
=1/298.9, 1/150.
Билет№22
1. Определение положения пунктов с помощью GPS приемников и инерцианальных систем. Наземный
сегмент системы ГЛОНАСС состоит
из следующих взаимосвязанных
стационарных элементов: центр управления
системой(ЦУС) контрольные станции
(КС),командная станция слежения,
квантово оптические станции и другие
станции слежения за работой бортовых
устройств спутников станция слежения
принимает все сигналы с проходящих
над ними спутников, вычисляя расстоянии
спутников, измеряют местные
метеорологические параметры и
определяют информацию на главную
станцию контроля на ней обрабатывают
всю поступающую информацию, вычисляют
и прогнозируют эфемериды спутников
и поправки в часы спутников, формируют
навигационные сообщения спутника.
Наземные антенны передают на спутник
навигационное сообщение, сформированное
на главной станции слежения. Наземные
передающие антенны расположены так,
что каждый спутник ежедневно принимает;,
по крайней мере три сеанса связи с
системой слеженияВ геодезия широкое
применение нашли приемники, способные
принимать С/А код + фазовое измерения
на частоте L) и С/А код + фазовые измерения
на частотах L1 и L2. GPS - приемники можно
классифицировать по области применения:
1) геодезические приемники; 2) навигационные
приемники; 3) приемники времени! 4)
военные приемники.При кодовых намерениях
приемник принимает специальный сигнал,
называемый кодом,
который
состоят из некоторого количества
единичных сигналов (псевдослучайные
коды). Каждый спутник NAVSTAR GPS излучает
свой код, спутники ГЛОНАСС используют
единый код на все спутники. В памяти
приемника хранятся все коды, по которым
производится распознавание номера
спутника (для NAVSTA& GPS), российские
спутники распознаются по частоте
излучения. В приемнике также формируются
точно такие же коды, что к на спутниках
и, сравнивая кодовые сигналы, принятие
со спутников, с аналогичными сигналами,
созданными в приемнике, решают две
задачи: 1) псевдослучайная последовательность
позволяет принимать сигналы малой
мощности с помощью антенн, 7) надежно
регистрировать время приема кодового
сигнала по часам приемника. В связи с
тем, что часы приемника не столь
стабильные как часы на спутниках (часы
примерно в миллион раз менее стабильны,
чем часы на спутнике), одновременно с
координатами приемника ( |
2. Преобразование плоских прямоугольных координат Гаусса-Крюгера из одной зоны в другую. Задача по преобразованию координат Гаусса-Крюгера возникает в двух случаях:
Когда возникает необходимость перехода от 6º к 3º зонам или к зонам с частным началом координат.
Существует 3 способа преобразования координат:
Исходные данные: х(1); у(2); L0(1)(n(1)); L0(2)(n(2)) Найти: х(2), у(2)- ?
х, у B, l(1)
Достоинство: 1. Способ универсальный 2. Способ точный, если использовать соответствующие формулы 3. Вычисления можно автоматизировать Недостаток: Если нет компьютера.
Этим способом можно решить 3 задачи (при использовании таблиц):
Достоинство: Оперативность решения. Недостаток: Невозможна автоматизация Выполняются преобразования координат из государственной в государственную систему.
Достоинство: Оперативность решения. Недостатки: Применяются в зонах взаимного перекрытия. Низкая точность способа, которая зависит от масштаба.
|
 )
определяется и поправка в часы
приемника, δt Интервал времени между
излучением сигнала на спутнике Тс и
приемом его в приемнике Тр? Умноженному
на скорость распространения
электромагнитных волн v, называют
псевдодальность, так как она содержит
значительную ошибку часов приемника
:
)
определяется и поправка в часы
приемника, δt Интервал времени между
излучением сигнала на спутнике Тс и
приемом его в приемнике Тр? Умноженному
на скорость распространения
электромагнитных волн v, называют
псевдодальность, так как она содержит
значительную ошибку часов приемника
: Расстояние
между спутником и приемником на момент
измерения связано с результатами
измерений следующим способом:
D:+δtV=(Tp-Tc)v, Таких измерений, должно быть
как минимум 4.При фазовых измерениях
псевдослучайные коды не используются,
а измерения выполняют на несущей
частоте, которую освобождают от
модуляции. В связи с тем, что длина
волны несущей частоты величина
небольшая - 19 см, а точность измерения
разности фаз составляет ~1%, то
потенциальная точность фазовых
измерений составляет 2 мм, а при
длительных измерениях за счет
осреднения эта точность в некоторых
случаях может быть еще увеличена. В
связи с тем, что частота на спутники
не совпадает с частотой приемника
Расстояние
между спутником и приемником на момент
измерения связано с результатами
измерений следующим способом:
D:+δtV=(Tp-Tc)v, Таких измерений, должно быть
как минимум 4.При фазовых измерениях
псевдослучайные коды не используются,
а измерения выполняют на несущей
частоте, которую освобождают от
модуляции. В связи с тем, что длина
волны несущей частоты величина
небольшая - 19 см, а точность измерения
разности фаз составляет ~1%, то
потенциальная точность фазовых
измерений составляет 2 мм, а при
длительных измерениях за счет
осреднения эта точность в некоторых
случаях может быть еще увеличена. В
связи с тем, что частота на спутники
не совпадает с частотой приемника
№1 Предмет и задачи курса прикладной геодезии: П.Г. заключается в топографо-геодезическом, инженерно-геодезическом обеспечении всех отраслей народного хозяйства. Она изучает методы топографо-геодезических изысканий и перенесение проектов сооружений в натуру, методы установки конструкций в проектное положение и методы определения деформаций инженерных сооружений. Она является геодезическим обеспечением строительства, является составной частью инженерно-строительного процесса. При решении сложных задач строительно-монтажного производства и наблюдение за деформацией инженерных сооружений специально разрабатываются методы, средства и технологии.
Основные виды геодезических работ: 1Топографо-геодезические изыскания: 1) создание планово-высотного обоснования и инженерно-топографическая съемка строительных площадок; 2) трассирование линейных сооружений; 3) геодезическая привязка горных выработок точек геофизических профилей. 2. Инженерно-геодезическое проектирование: 1)составление топопланов необходимых масштабов и профилей; 2)геодезическая подготовка проекта для перенесения его в натуру, составление проекта разбивочных работ. 3)решение задач горизонтальной и вертикальной планировки, подсчет объемов водохранилищ. 3 Разбивочные работы: 1) построение разбивочной основы в виде строительной сетки, полигонометрии, триангуляции.. 2)вынесение в натуру главных и основных осей, детальная разбивка сооружений. 3)исполнительные съемки. 4.наблюдение за деформациями инженерных сооружений: а) измерение осадок оснований и фундаментов; б) определение плановых смещений сооружений.
Геодезические построения: 1) триангуляция-сеть примыкающий друг к другу треугольников, в кот. Измеряются все углы и некоторые стороны. Вершины углов намечаются на командных высотах, взаимная видимость между пунктами. 2) Полигонометрия: ломаная линия, состоящая из прямых отрезков и горизонтальных углов между ними. Этот метод является более эффективным для построения геодезического обоснования в городах и заселенных районах. 3) трилатерация - сеть примыкающих друг к другу треугольников в кот. Измеряются все стороны. 4) линейно-угловые построения- сети отличаются наибольшей точностью определения координат сети, в кот. Измеряются все углы и стороны.
Фазовый метод gps. Уравнение фазы. Принцип определения базовых линий из относительных определений. Фазовые разности.
Фазовый метод-определение дальности от спутника до спутникового приёмника по измерению на этом пути фазы несущей волны.
Уравнение
фазы:

n-целое число колебаний волн
 -
дробная часть волны в относительной
мере.
-
дробная часть волны в относительной
мере.
Колебания КА и АП несинхронные (начальные фазы неодинаковы, частоты отличаются) кроме этого дальность спутника не остаётся постоянной. Пока волна идёт от передатчика на спутнике до приёмника на Земле, спутник движется скорость движения спутника может увеличиваться и изменяться. Дальности, определяемые по фазе несущей для краткости, будем называть фазовыми. В сущности, это псевдодальности, Фазовая дальность P отличается от геометрического расстояния R м/у приёмником и спутником на величины d и D, определяемые отличием шкалы времени соответственно на спутнике и в приёмнике от шкалы системного времени.
Геометрическая
= - исправленной на величины d
и D.
Поэтому
- исправленной на величины d
и D.
Поэтому
 .
.
№2 Геодезические разбивочные работы. Нормы точности РР. Способы разбивки осей. Способы выноса плановых точек в натуру.
Способы разбивки основных осей: в зависимости от вида сооружений, условий
измерений, требований к точности построения сооружений, разбивка может быть выполнена одним из способов: 1) прямоугольных координат; 2)полярных координат; 3) прямой угловой засечки; 4) линейной засечки; 5) створной засечки.
Способ полярных координат: применяется при выносе точек главных осей с пунктов полигонометрического хода, когда выносимые точки располагаются сравнительно недалеко от пунктов. Для реализации этого способа нужно 2 пункта, точность взаимного положения, которых не менее чем в 2 раза больше точности разбивки. Между ними должна быть видимость.
Способ прямоугольных координат: применяется при выносе осей от пунктов строительной сетки, нужно иметь 2 пункта с прямой видимостью, теодолит и рулетку. Разбивку начинают с той оси, по которой откладывают наибольшее приращение От пункта1 откладывают ∆y и фиксируют точку, в точку 1 устанавливают теодолит и откладывают угол 90, в этом направлении откладывают ∆x и закрепляют точку А.Рекомендации: необходимо по перпендикуляру к стороне сетки откладывать более короткие приращения координат, а по стороне сетки более длинные приращения. Способ угловой засечки: для выноса нужно 2 исходных пункта в прямой видимости. Построения выполняются путем отложения углов на исходных пунктах. Причем углы откладывают при 2 положениях круга. Значение углов получают как разность дирекционных. Способ линейной засечки: выносимая точка определяется на местности путем отложения 2-х расстояний от исходных точек. Пусть имеем на местности точки А и Б. Выполняется линейная засечка, чтобы вынести S и D .Для этого надо найти расстояния s1 и S2, пересечение которых даст точку Д. Аналогично получим точку С.
Геодезические
разбивочные работы.
Разбивкой сооружения или вынесение
проекта в натуру, называется геодезические
работы выполняемые на местности для
определения планового и высотного
положения характерных точек и плоскости
строящегося сооружения согласно рабочим
чертежам. Нормы
точности разбивочных работ:
точность зависит от типа и назначения
сооружения и определяется СНиПами,
тех. Условий проекта сооружений. В
проекте задается допуск на эти работы.
Предельно допустимое отклонение:.

 .
Точность возведения сооружений зависит
от точности геодезических работ,
точности тех. Расчетов, точности
монтажных работ с учетом независимых
влияний:
.
Точность возведения сооружений зависит
от точности геодезических работ,
точности тех. Расчетов, точности
монтажных работ с учетом независимых
влияний: исходя из этого принципа определяется
точность измерений.
исходя из этого принципа определяется
точность измерений.
Спутниковые и радионавигационные системы gps и глонасс. Принципы функционирования. Значения спутниковых технологий в геодезии.
Орбитальные группировки GPS и ГЛОНАСС состоит из 24 спутников. Спутники в GPS расположены в 6, а ГЛОНАСС в 3 плоскостях развёрнутых соответственно через 600 и 1200 по долготе восходящего узла. Если все спутники системы перевести в одну плоскость, то они расположатся равномерно через 150 и образуют «хоровод» вокруг Земли.
|
GPS |
ГЛОНАСС |
Наклон орбиты i |
550 |
54.80 |
Период обращения Т |
11ч57мин |
11ч16мин |
Высота КА(космич.ап-т) |
20150км |
19100км |
Каждый КА проходит по орбите около 167000 км. Период обращения Т для ГЛОНАСС несколько больше отличается от 12 часов чем период GPS.Это сделано сознательно. Такая орбита эффективна с точки зрения поддерживания орбитальной группировки: намного реже приходится корректировать положение КА. При этом зоны радиовидимости для пользователей повторяются через 17 витков, примерно через 8 суток. Спутники GPS проходят над контрольными пунктами дважды в сутки. Собранная информация об орбитах обрабатывается и прогнозируются координаты спутников. Эти и др. данные с наземных станций загружаются на борт каждого КА. GPS управляет главная станция на базе ВВС. Каждый спутник имеет несколько атомных эталонов частоты и времени, и аппаратуру для приёма и передачи радиосигналов, бортовую компьютерную аппаратуру. Размеры спутников с учетом панелей солнечных батарей > 5м. Вес спутника =1тонне. Расчетное время существования на орбите 7-8 лет. КА сохраняет стабильным заданное положение на орбите, принимает и сохраняет инф-ию с наземных станций, передаёт в аппаратуру пользователей измерительные радиосигналы, данные о точном времени, свои координаты и др. сведения. ГЛОНАСС: масса апп-та примерно 15 тонн, его длина примерно 8м, срок активного существования КА 3-5 лет. Запуск спутника идёт с космодрома Байконур. Подсистема наземного контроля и управления включает центральное управление системой под Москвой, центральный синхронизатор с высокоточным водородным стандартом частоты и времени для синхронизации системы, сеть по территории РФ контроль станций осуществляет сеансы транспортных и временных измерений, собирают телеметрическую инф-ию о состоянии бортовых систем, обеспечивают закладку на спутники 1 или 2 рода в сутки высокоточных эфемерид и временных поправок; система контроля фаз, для синхронизации фаз сигналов, изучаемых всеми спутниками; квантово-оптические станции для переодич. юстировки радиотех-х каналов измерения дальностей. Подсистема наземного контроля и управления осуществляет сбор, наполнение и обработку траекторной и телеметрической инф-ии обо всех спутниках системы формирования и выдачу на каждый спутник
№3 Способы перенесения в натуру проектных отметок, линий и плоскостей с заданным уклоном. Составление плана организации рельефа.
Составление плана организации рельефа. Решает задачи по преобразованию рельефа городской территории для приспособления его к застройки и.т.д. обеспечивает высотное решение площадей, улиц и т.д. Определяющим доказательством проекта является схема организации рельефа. Проектное решение проводится в основном по осям проектируемых проездов в виде проектных проездов в виде проектных отметок точек пересечения осей и перегибов продольного профиля также расхождения между точками осей и перегибов профиля, уклоны и направления стока. К схеме прилагают проекты поперечных профилей улиц в масштабах 1:100 –1:200 . Рабочий план организации рельефа составляют на топографическом плане в масштабах 1:500-1:1000. Исходными служат проектные отметки схемы организации рельефа. Проектный рельеф, образуемый отдельными оформляющими плоскостями, может быть задан либо в виде профилей, либо проектными горизонтами.
Отметки: Проектная отметка выносится в натуру от ближайших реперов, используя горизонт инструмента. Установив нивелир м/у ближайшим репером т. А и т. В, первую нужно вынести на проектную отметку Hпр Рейку по команде наблюдателя поднимает или опускает вниз до тех пор пока отсчет не установится =B, в этот момент пятка рейки оказывается на проектной отметки. Для контроля работ после выноса точки B, в натуру на проектную отметку выполняют нив-е и определяют фактическую отметку вынесенной точки. Полученную отметку сравнивают с проектной .При обнаружении недопустимых отклонений, работу отменяют. Hпр в т. В может быть вынесена способом редуцирования. Для этого выносимую точку В приближенно устанавливают на проективную отметку. Затем нивелиром измеряют превышение между исходным репером и вынесенной точках. Полученное превышение сравнивают с проектной: hпр = Hпр – Hисх кр h = hпр - hизм По полученной разности h измеряют высоту точки так, что hизм = hпр Линии: бывают случаи, когда надо установить линию в проектное положение в этом случае сначала устанавливают конечные точки АиВ на проектной отметки, в случае если известно только 1 проектная отметка, то HВпр = HАпр + lАВ i ,
i- продольный уклон В точке А и точке В устанавливаются рейки перед точкой А нивелир устанавливаем так чтобы 2 подъемных винта были // линии АВ (вдоль) , а 3-й | - но. Вращая подъемные винты методом приближений добиваются, чтобы отсчеты по рейкам стали одинаковыми, в этом случаи внутренний луч зрительной трубки нивелира будет иметь уклон= Iпр =>через каждые 5 метров устанавливают рейку в створе АВ поднимая или опуская рейку добиваются чтоб отсчет по ней равнялся отсчету А и В.в этот момент пятка рейки будет находиться на линии проектного уклона. Точку фиксируют колышком.
Плоскости –сначала выносят на проектной отметки точки А,В,С,Д в углы площадки. Действуя подъемными, добиваются методом приближения. Чтобы отсчеты на всех направлениях точках были равны между собой. То есть, чтобы линия визирования // заданной проектной плоскости. При установки рейки в любом месте внутри площадки добиваются, чтобы отсчет по этой рейки также равна отсчету на крайних точках А,В,С,Д в этот момент пятка рейки будет находиться в проектной плоскости. Составление плана организации рельефа. Решает задачи по преобразованию рельефа городской территории для приспособления его к застройки и.т.д. обеспечивает высотное решение площадей, улиц и т.д. Определяющим доказательством проекта является схема организации рельефа. Проектное решение проводится в основном по осям проектируемых проездов в виде проектных проездов в виде проектных отметок точек пересечения осей и перегибов продольного профиля также расхождения между точками осей и перегибов профиля, уклоны и направления стока. К схеме прилагают проекты поперечных профилей улиц в масштабах 1:100 –1:200 . Рабочий план организации рельефа составляют на топографическом плане в масштабах 1:500-1:1000. Исходными служат проектные отметки схемы организации рельефа. Проектный рельеф, образуемый отдельными оформляющими плоскостями, может быть задан либо в виде профилей, либо проектными горизонтами.
Метод профилей - на топографический план наносят сетку, по линии, которая составляет продольные профили в масштабе плана проекта. Расхождения между профилями при планировке кварталов равно 20-50м, а при планировке больших территорий равно 100-20м.
Метод проектных горизонталей - на плане проводит проектные горизонтали рельефа, образуется после изменения естественного рельефа путем срезок и подсыпок. Проектные горизонтали между линиями перегибов и скатов изображаются прямыми равно отстоящими друг от друга // прямыми. Сечение h для проекций горизонталей 0,1-0,5 м в зависимости от характера естественного рельефа. Положение проектных горизонталей на плане определяют по проектным отметкам точек X-е осей проездов и точек перегибов проектного рельефа. Расстояние l (заложение) между смежными проектными горизонталями на плане подсчитывают по формуле l = h / I M ,где i-продольный проектный уклон, M-знаменатель численного масштаба на плане. На границе 2-х оформляющих плоскостей, проектные горизонтали имеют излом. Составление плана начинают с улиц 1-горизонтали по проезду, а затем развивают их до фасадной линии застройки. При этом учитывают поперечные уклоны проездов, газонов и так далее. При проектировании рельефа внутри квартала исходными являются отметки вертикальной планировки по улицам. Она должна обеспечивать сбор и отвод поверхностной воды с территории квартала. Проектные горизонтали проводятся с учетом характера естественного рельефа, предусматривая минимум земельных работ. Крутые склоны или возвышенные места оформляют озеленёнными откосами, подпорными стенками. На плане указывают отметки «чистого плана» первого этажа, проектные и существующие отметки перпендикуляров зданий и сооружений.
Техника съемок с фазовым приемником (статика, быстрая статика, реоккупация, кинематика stop-and-go, истинная кинематика ). Съемка с пост-обороткой и в реальном времени.
Статика : Наиболее ощутимые выгоды от внедрения идеи исключения погрешности достигнуты в способах относительных измерении. Аппаратуру устанавливают на двух станциях А и В . Одну из них называют базой или референц- станций . формируют разности из наблюдении на станциях . В статике по разностям, свободным от многих искажении ,вычисляют соединяющие эти станции пространственный вектор D :
D=(XB - ХA ,УB –УA , ZB –ZA )т .
Базовая станция должна иметь точные координаты ,чтобы по измеренным приращениям можно было бы вычислить координаты остальных пунктов геодезической сети. Благодаря измерению приращении координат и применению фазового метода погрешности в результатах сведены к нескольким см. Способ - статики является точным и трудоемким. Точность статики зависит от продолжительности измерения. Измерения в течение 5 мин обеспечивают дециметровую точность .Обычно продолжительность наблюдении на паре станции составляет около 1 часа . Экономически статику целесообразна использовать с двухчастотными приемниками на расстоянии между ними 10 км ; сравнение измерении показывает, что одночастотные приемники уступают двухчастотным ,их целесообразна применять на расстояниях при длинах базой линии менее 10 км.
Меньшую продолжительность наблюдений имеет способ ускоренной статики, где имеет место активный поиск чисел неоднозначности. Главная цель – как можно быстрее разрешить неоднозначность. При 5 спутниках наблюдения время этих измерений длится до 20, а при 6 – до 10мин. Мах D=10км. Ещё менее трудоёмки наблюдения в разновидности статики – в методе реокупации. Подвижный приёмник на станции принимает сигналы примерно в течение 10мин, затем его переносят на другие пункты. По истечении часа приёмник возвращают на прежние пункты и продолжают сбор данных. Таким образом, непрерывность измерений на базовой станции сохраняется, а на подвижной они фиксированы только в начале и в конце часового интервала. Одновременное наблюдение спутников GPS и ГЛОНАСС позволяет достичь см. точности в 3-6 раз быстрее.
Кинематика. Для съёмочных и др. работ, требующих значительных перемещений наблюдений на точке предложен ряд способов кинематич. позиционирования. Используют как двухчастотные, так и одночастотные приёмники. Измерения начинают со станции А и В, корд. которых и базовый вектор D между ними должны быть известны. Процесс привязки подвижного приёмника к базовому вектору называют инициализацией. Её цель – разрешить неоднозначность на известном базисе D. Применяют несколько способов инициализации: 1)положение базового вектора известно точнее 5см. приёмники устанавливают на его концах и наблюдают несколько мин.