

Міністерство освіти і науки, молоді та спорту України
Національний університет водного господарства та природокористування Кафедра електротехніки та автоматики
Розрахунково-графічна робота
з дисципліни :
«Теорія автоматичного управління спеціальними системами»
Виконав:
студент 3-го курсу
групи АУТП-1
Шляховчук Віталій
Перевірив :
Христюк А.О.
Шифр залікової книжки 75
Рівне 2011
Задача 1
Складається з розв'язку однієї задачі трьома способами та написання висновка про відповідність отриманих результатів в кожному з способів між собою.
Потрібно:
1) побудувати фазовий портрет системи на підставі диференціальних рівнянь;
2) побудувати фазовий портрет системи методом ізоклін;
побудувати фазовий портрет системи за допомогою модуля Simulink системи MatLab;
написати висновок про відповідність отриманих різними методами фазових портретів, та про можливості застосування кожного з методів побудови.

Параметри ланок та початкові умови (х1; х2) вибираємо з табл.1 та табл.2.
Таблиця 1
Остання цифра шифру |
К |
Т1 |
Т2 |
5 |
1,5 |
1 |
0,15 |
Таблиця 2
Остання цифра суми двох останніх цифр шифру |
В |
а |
Початкові умови |
|
х1 |
х2 |
|||
2 |
3 |
2,5 |
0 |
0 |
Розвязок:
Побудова фазового портрету системи на підставі диференціальних рівнянь
Згідно структурної схеми запишемо рівняння розімкнутої САУ:
 .
.
Це рівняння в операторній формі матиме вигляд:
 .
.
Перейшовши до оригіналів отримаємо:
 .
.
Статична характеристика нелінійного елемента описується наступним рівнянням:

Так
як функція U( )
приймає значення
+В
та
-В
тому матимемо:
)
приймає значення
+В
та
-В
тому матимемо:

В нашому випадку нелінійність являє собою два відрізка прямих ліній, яким відповідають умови (1) і (2).
Запишемо ці рівняння в 1-ій нормальній формі Коші:




Поділимо друге рівняння системи на перше


Після цього треба розділити змінні х1 та х2:

Проінтегрувавши останні рівняння, знайдемо х1 для першого і другого випадків:

З врахуванням вихідних даних ці рівняння набудуть вигляду :


Ми отримали дві лінії переключення та дві області побудови, які описуються системою:

Після цього проведемо побудову:
З початкових умов (приймаємо нульові початкові умови) знайдемо
 =1,015;
Будуємо
табличку х1
(х2)
для випадку (1)
:
=1,015;
Будуємо
табличку х1
(х2)
для випадку (1)
:
x2 |
0,00 |
1,00 |
2,00 |
3,00 |
4,00 |
4,46 |
x1 |
0,00 |
0,02 |
0,10 |
0,29 |
0,88 |
2,50 |
Коли х1 стало рівним -2,5, то приймаємо кінцеві значення х1 та х2 як початкові умови для розрахунку: С2=1,69. Будуємо табличку х1( х2) для випадку (2) при С2=1,69
x2 |
4,46 |
4,00 |
3,00 |
2,00 |
1,00 |
0,00 |
-1,00 |
-2,00 |
-3,00 |
-4,00 |
-4,50 |
x1 |
2,50 |
2,53 |
2,60 |
2,65 |
2,69 |
2,71 |
2,69 |
2,61 |
2,41 |
1,82 |
-2,50 |
Аналогічно знаходимо: С1=-1,69 Будуємо табличку х1( х2) для випадку (2) при С1=-1,69
x2 |
-4,50 |
-4,00 |
-3,00 |
-2,00 |
-1,00 |
0,00 |
1,00 |
2,00 |
3,00 |
4,00 |
4,50 |
x1 |
-2,50 |
-2,53 |
-2,60 |
-2,65 |
-2,69 |
-2,71 |
-2,69 |
-2,61 |
-2,41 |
-1,82 |
2,50 |
Аналогічно знаходимо С2=1,69;
Будуємо табличку х1( х2) для випадку (2) при С2=1,69;
x2 |
4,50 |
4,00 |
3,00 |
2,00 |
1,00 |
0,00 |
-1,00 |
-2,00 |
-3,00 |
-4,00 |
-4,50 |
x1 |
2,50 |
2,53 |
2,60 |
2,65 |
2,69 |
2,71 |
2,69 |
2,61 |
2,41 |
1,82 |
-2,50 |
По всіх табличках послідовно будуємо графік

Рис.2 Фазовий портрет системи, побудований на основі диференціальних рівнянь
Побудову фазового портрету системи методом ізоклін проводять зазвичай наступним чином:
Динамічні властивості нелінійної системи описуються наступними рівняннями:
Диференціальне рівняння в операторній формі буде мати вигляд:
Перейшовши до оригіналів отримаємо:
Так як статична характеристика нелінійного елемента має вигляд:


Диференціальні рівняння руху системи будуть мати вигляд:

Так як фазова площина може бути розбита на дві області, то необхідно визначити рівняння ізоклін для кожної області.
Знайдемо рівняння ізоклін для області (І) на рис. 2. Введемо позначення:

Останні вирази визначають нахил фазової траєкторії в даній точці. Рівняння (1) і (2) запишемо в наступному вигляді:

або

Для виключення часу t розділимо останню систему на

Звідси:
Отримуємо рівняння ізоклін:

Ізокліни представляють собою прямі, паралельні до осі Ох і знаходяться від початку координат на відстанях, що залежать від величини нахилу N та М при заданих параметрах системи. Задаючи значення N та М від 0 до нескінченності, отримаємо сім'ю ізоклін.
Для побудови фазового портрета зручніше спочатку виразити параметри N та М через координату х2.
Після підстановки числових значень параметрів отримаємо:

Для останньої системи при зміні х2 обчислимо N, М, arctgN та arctgМ
x2 |
5 |
4 |
3 |
2 |
1 |
0 |
-1 |
-2 |
-3 |
-4 |
-5 |
N |
-0,667 |
0,833 |
3,333 |
8,333 |
23,333 |
- |
-36,667 |
-21,667 |
-16,667 |
-14,167 |
-12,667 |
|
-0,588 |
0,695 |
1,279 |
1,451 |
1,528 |
- |
-1,544 |
-1,525 |
-1,511 |
-1,500 |
-1,492 |
arctgN |
-33,690 |
39,806 |
73,301 |
83,157 |
87,546 |
90 |
-88,438 |
-87,358 |
-86,566 |
-85,962 |
-85,486 |
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
5 |
4 |
3 |
2 |
1 |
0 |
-1 |
-2 |
-3 |
-4 |
-5 |
M |
-12,667 |
-14,167 |
-16,667 |
-21,667 |
-36,667 |
- |
23,333 |
8,333 |
3,333 |
0,833 |
-0,667 |
|
-1,492 |
-1,500 |
-1,511 |
-1,525 |
-1,544 |
- |
1,528 |
1,451 |
1,279 |
0,695 |
-0,588 |
arctgM |
-85,486 |
-85,962 |
-86,566 |
-87,358 |
-88,438 |
90 |
87,546 |
83,157 |
73,301 |
39,806 |
-33,690 |
Згідно цих двох таблиць на фазовій площині проводимо ізокліни. На кожній ізокліні наносимо лінії, що вказують нахил фазової траєкторії arctgN і arctgМ, коли вона перетинає дану ізокліну. Далі, починаючи з початкової точки (визначається початковими умовами (приймаємо точку (1,5;0)) проводимо побудову фазового портрета, шляхом послідовного проведення відрізків між ізоклінами, з умовою, що відрізок перетинає ізокліну під вказаним кутом.

Рис.3 Фазовий портрет системи, побудований за методом ізоклін
Побудова фазового портрету системи за допомогою модуля Simulink системи Matlab
Складемо в програмі MatLab структурну схему заданої системи. Виходячи з визначення фазового портрету, сигнал з виходу системи подаємо на два елементи: на вхід Х моделі осцилографа та на вхід диференціатора. На другий вхід моделі осцилографа подаємо сигнал з виходу диференціатора.
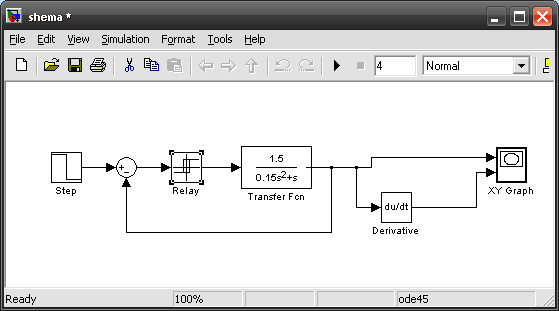
Рис.4 Модель для побудови фазового портрету, зібрана в програмі Matlab згідно заданих значень

Рис.5 Фазовий портрет системи, отриманий в Matlab