

Министерство образования Российской Федерации
Тульский государственный университет
Кафедра Газовой динамики
Расчет массоинерционных характеристик изделия Методические указания
по дисциплине "Моделирование процессов функционирования ГИУ"
(спецдисциплины по выбору)
для студентов очного обучения
направления 551800 – технологические машины и оборудование
специальности 171400 – средства поражения и боеприпасы
Тула 2001г.
Разработал: в.В. Бекленищев, д.Т.Н., доцент, профессор каф. Гд Методические указания обсуждены на заседании кафедры гд факультета МиСу ,
протокол №_____ от «____»______________2001г.
Зав. Кафедрой _______________________
При проектировании различных машин и механизмов возникают задачи, для решения которых необходимо иметь точные сведения о распределении массы в конструируемой механической системе. Для изделий отрасли к таким задачам относятся: прогнозирование элементов траекторий полета, оценка устойчивости движения на траектории, обеспечение требуемой эффективности функционирования и др. Данная программа “Масса”, разработанная для ПЭВМ работает в операционной системе MS Dos в диалоговом режиме и предназначена для оценки массы, положения центра масс, главных центральных моментов инерции изделий и составляющих изделие деталей типа “тела вращения”.
В основу алгоритма расчета положены рекомендации изложенные в справочнике М.В. Фаворина “Моменты инерции тел” (М. , “Машиностроение”, 1977).
Основные положения.
1.При разработке алгоритма расчета использованы:
Прямоугольные системы координат:
главная (начало в точке А, совпадающей с вершиной изделия – см. рис.1) – AXYZ;
главная центральная (начало в центре масс точке О) – ОX0Y0Z0.
Оси систем координат:
- главной - XX, YY, ZZ;
- главной центральной - X0X0, Y0Y0, Z0Z0.
Статические моменты тела относительно координатных плоскостей :
- YAZ - Sx;
- ZAX - Sy;
- XAY - Sz.
Моменты инерции тела относительно плоскостей систем координат:
- главной - JYAZ, JZAX, JXAY;
- главной центральной - JYoOZo, JZoOXo, JXoOYo.
2.Мысленно разбивая тело на большое число n малых частей, представим массу тела М как сумму его частей
![]() .
.
Статическим моментом тела относительно плоскости называют сумму произведений массы каждой части тела (mi) на ее расстояние до этой плоскости (ri). Расстояние точек, находящихся по одну (другую) сторону от плоскости, считают положительным (отрицательным):
![]() .
.
Моментом инерции тела относительно оси (плоскости или полюса) называют сумму произведений массы каждой частицы тела на квадрат ее расстояния до этой оси (плоскости или полюса):
![]() .
.
Центробежным моментом инерции тела (моментом девиации или произведением инерции) называют сумму произведений массы каждой частицы тела на две ее координаты, являющиеся расстояниями от двух взаимно перпендикулярных плоскостей P и F, взятыми с соответствующими знаками:
![]() .
.
Моменты инерции физического тела относительно оси, плоскости или полюса всегда положительны. Статический момент и центробежные моменты инерции тела могут быть положительными, отрицательными или равными нулю в зависимости от положения тела относительно плоскостей системы координат.
Размерность статических моментов и моментов инерции в физических системах единиц:
![]() ;
;
![]() .
.
Наряду с моментами инерции тела относительно оси (плоскости или полюса) часто рассматривают радиусы инерции (плечо инерции, гирационный радиус), т.е. величину имеющую размерность длины, на квадрат которой надо умножить массу тела, чтобы получить момент инерции тела относительно оси (плоскости или полюса):
![]() .
.
3.Методика расчета характеристик геометрии масс сложных тел вращения.
В предлагаемой методике вычисления массоинерционных характеристик сложных тел вращения (сборочных единиц) использован метод аппроксимации.
3.1.Подготовительный этап.
3.1.1.В определенном масштабе вычерчивают сечение (по оси симметрии) конкретного изделия. Главную прямоугольную систему координат AXYZ располагают у левого края изделия, направив по оси симметрии главную ось АХ, а ось AZ перпендикулярно плоскости чертежа (раис.1).
3.1.2.В выбранном масштабе вычерчивают отдельно сечения всех деталей изделия, сохранив их положение относительно осей системы координат AXYZ. Всем деталям присваивается порядковый номер.
Примечание. Рассматриваемый вариант методики позволяет рассчитывать массоинерционные характеристики изделий состоящих из 15 деталей (не более).

рис.1.
3.1.3.Плоскостями, перпендикулярными к оси AX, каждую деталь разбивают по наружному и внутреннему контуру на элементы простой геометрической формы типа: цилиндр, усеченный круговой конус, полуоживал, усеченный полуоживал. При этом необходимо соблюдать следующие правила:
- разбивка деталей на элементы плоскостями проводится вначале по наружной образующей слева направо, а затем по внутренней поверхности справа налево;
- для наружных поверхностей деталей участки, выполненные (по чертежу) в виде канавок или переходов, скруглений типа “вогнутая” поверхность, оформленных по радиусу (рис.2), необходимо заменить на участки оформленные ломаными прямыми линиями;
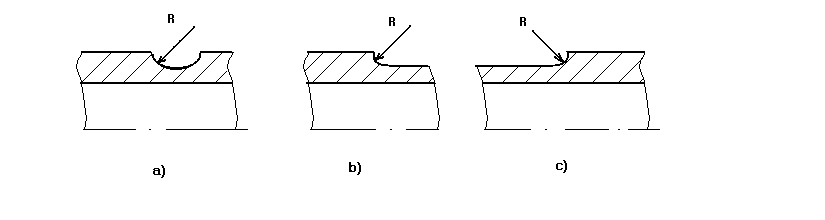
рис.2.
- для внутренних поверхностей деталей участки, выполненные по чертежу в виде выступов или переходов, скруглений типа “выпуклая” поверхность, оформленных по радиусу (рис.3), необходимо заменить на участок оформленный ломаными прямыми линиями;
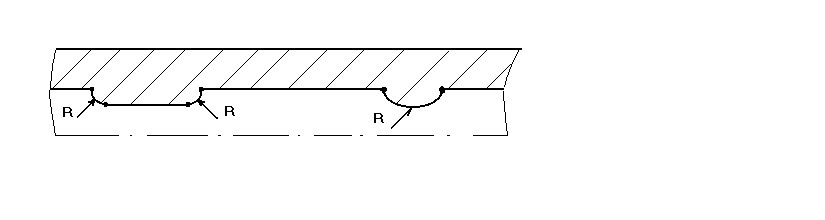
рис.3.
- в данном варианте методики каждая деталь может быть разделена на элементарные участки не более чем 40 плоскостями (или 40 точками - следами пересечения секущими плоскостями с образующими деталей);
- по чертежу определяют геометрические размеры выделенных элементов деталей. Для этого необходимо определить для каждой точки детали:
- расстояние от оси AY;
- диаметр образующей поверхности детали в данной точке;
- радиус поверхности (криволинейной) исходящей из данной точки, если из данной точки выходит прямая линия, то радиус равен “0”.
3.2.Расчет характеристик геометрии масс.
3.2.1.Для каждого выделенного элемента j детали i, зная плотность материала i, подсчитывают: массу mij, координату центра масс относительно плоскости - левого основания элемента lij, вспомогательные величины - моменты инерции относительно главных центральных плоскостей элемента
![]() ;
;
![]() .
.
При этом используются известные зависимости, при веденные в справочнике М.В. Фаворина, для цилиндра, конуса или усеченного конуса. Для элемента “полуоживал” или “усеченный полуоживал” применяется метод аппроксимации: элемент разбивается на 50 и более тонких усеченных полуоживал, которые в свою очередь заменяются усеченными конусами и применяются соответствующие формулы.
3.2.2.Для каждого выделенного ij элемента в главной системе координат AXYZ подсчитывают:
- координату центра масс относительно плоскости YAZ
![]() ;
;
- статический момент относительно плоскости YAZ
![]() ;
;
- произведение массы элемента на квадрат его координаты центра масс
![]() .
.
3.2.3.Для каждой детали вычисляют:
- массу ;
- координату центра масс относительно координатной плоскости YAZ
![]() ;
;
- моменты инерции изделия относительно главных центральных осей
![]() ;
;
![]() .
.
Работа программы.
С учетом изложенного разработаны алгоритм и программа для ЭВМ "Масса", работающая в диалоговом режиме. После старта программа выдает на дисплей команду на присвоение номера изделию - ' Введите номер файла исх.данных - целое двузначн. число в апострофах ', а затем меню режимов работы. Предлагается выбрать из меню один из следующих вариантов работы блока ввода подготовки данных:
Выберите работу:
Ввод с клавиатуры в файл ge15.dat исх. данных .........(1)
Просмотр файла ge15.dat и его корректировка ...........(2)
Формирование рабочего файла gs15.dat и счет ...........(3)
Конец работы.................................................................(0)
В данном примере изделие получило номер 15. Режимы 1 и 2 предполагают ввод и корректировку исходных параметров непосредственно в файл ge15.dat. Назначение остальных режимов ясно из их названий. Результаты работы программы выводятся в файл gs15.dat и poum15.dat.
При выборе режима 1 программа предлагает пользователю выполнять следующие действия:
'Введите наименование изделия -текст до 60 символов в апострофах';
' Введите количество деталей в изделии kdet= ';
(kdet = от 1 до 15)
' Деталь N 1 ';
' Введите плотность материала детали г/см3 ';
' Введите количество точек образующей поверхности детали ',
(число точек не более 40);
' Точка N 1 '
' Введите координату X точки ';
' Введите диаметр в рассматриваемом сечении ';
' Введите радиус оживала элемента ',
(если радиус отсутствует, то R=0);
Далее аналогичные команды будет предложено выполнить для точек N 2; 3; 4 и т.д. Если изделие состоит более чем из одной детали, то программа предложит повторить команды для всех остальных деталей.
Режим работы программы (1) заканчивается созданием файла ge15.dat и вопросом:
' Введенные исходные данные будем просматривать(1/0)? ' Ответ пользователя: 'да' - 1; 'нет' - 0.
Если пользователь набирает код - 1, то программа переходит к режиму (2).
В режиме (2) программа предлагает пользователю выполнять следующие действия:
' Количество деталей в изделии kdet= , исправить?(1/0) ' Ответ пользователя: 'да' - 1; 'нет' - 0.
Если пользователь набирает код - 1, то программа предлагает
' Введите новое значение ',kdet
Пользователь должен ввести новое значение.
Далее программа переходит к последовательному опросу по всем деталям.
' Деталь 1 '
' Плотность материала детали исправить?(1/0) '
Ответ пользователя: 'да' - 1; 'нет' - 0.
Если пользователь набирает код - 1, то программа предлагает
' Введите новое значение '
Пользователь должен ввести новое значение.
' Количество точек образующей поверхностей детали, исправить?(1/0) '
Ответ пользователя: 'да' - 1; 'нет' - 0.
Если пользователь набирает код - 1, то программа предлагает
' Введите новое значение '
Пользователь должен ввести новое значение.
И так по всем позициям файла ge15.dat до конца. На этом работа программы в режиме (2) заканчивается. Файл ge15.dat подготовлен к работе программы в режиме (3).
При обращении пользователя к режиму (3) программа формирует рабочий файла gs15.dat и выполняет расчет. Результат работы записывается в файл poum15.dat.
Пример работы программы. На рисунке N представлена пуля спортивно-охотничьего патрона 7.62х39 с латунной оболочкой.
Исходный файл ge15.dat имеет вид:
" 7,62-латунная оболочка
kdet/j,gam(j),m(j)/i,x(j,i),d(j,i),r(j,i)
2
1 11.300000 4
1 11.150000 6.200000 39.500000
2 15.850000 6.800000 0.000000E+00
3 22.450000 6.870000 0.000000E+00
4 24.900000 6.010000 0.000000E+00
2 9.300000 11
1 0.000000E+00 0.000000E+00 1.180000
2 2.500000E-01 1.350000 40.000000
3 15.750000 7.860000 0.000000E+00
4 22.450000 7.910000 0.000000E+00
5 26.450000 6.780000 0.000000E+00
6 26.450000 4.000000 0.000000E+00
7 25.600000 4.000000 0.000000E+00
8 25.600000 5.840000 0.000000E+00
9 22.450000 6.870000 0.000000E+00
10 15.850000 6.800000 39.500000
11 1.300000 1.000000 0.000000E+00
Результаты работы программы файл poum15.dat имеет вид:
7,62-латунная оболочка
1 -кол.вариантов KVAR
1 -номер варианта
1 -номер детали NOMDET
1 1 11.30 3.10 3.40 4.70 11.15 39.50
2 1 11.30 3.40 3.43 6.60 15.85 .00
3 1 11.30 3.43 3.01 2.45 22.45 .00
масса m= .5454E-02 kg
коорд. ц.м. относит. базовой плоск. X= 18.04 мм
моменты инерции кг*м**2 A= .3059E-07 B= .9676E-07
2 -номер детали NOMDET
1 1 9.30 .00 .68 .25 .00 1.18
2 1 9.30 .68 3.93 15.50 .25 40.00
3 1 9.30 3.93 3.95 6.70 15.75 .00
4 1 9.30 3.95 3.39 4.00 22.45 .00
5 1 9.30 3.39 2.00 .00 26.45 .00
6 -1 9.30 2.00 2.00 .85 25.60 .00
7 1 9.30 2.00 2.92 .00 25.60 .00
8 -1 9.30 3.43 2.92 3.15 22.45 .00
9 -1 9.30 3.40 3.43 6.60 15.85 .00
10 -1 9.30 .50 3.40 14.55 1.30 39.50
масса m= .2509E-02 kg
коорд. ц.м. относит. базовой плоск. X= 15.81 мм
моменты инерции кг*м**2 A= .2711E-07 B= .1332E-06
масса изделия m= .7962E-02 кг
коорд ц.м. относит. базовой плоск. X= 17.34 мм
моменты инерции кг*м**2 A= .5770E-07 B= .2385E-06