

§10.4 Многоемкостные объекты без самовыравнивания.
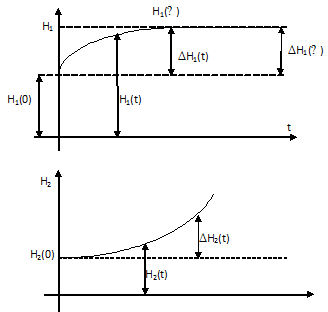
Такие объекты, как и одноемкостные, после приложения к ним возмущения не приходят самостоятельно к состоянию равновесия. Свойства подобных объектовт рассмотрим на примере двухемкостного объекта (рис.10.5).
Регулируемая величина
является отклонением уровня воды во
2-м бассейне
![]() ,
а возмущающим воздействием – изменение
притока
,
а возмущающим воздействием – изменение
притока
![]() .
.
Такой объект можно представить в виде последовательного соединения апериодического звена 1-го порядка (1-й бассейн) с передаточной функцией:
![]()
и идеального интегрирующего звена (2-й бассейн) с передаточной функцией:
![]()
где
![]() - приращение притока во 2-й бассейн.
- приращение притока во 2-й бассейн.
Передаточная функция объекта:
![]()
Таким образом, указанный объект в динамическом отношении подобен реальному интегрирующему звену.
Регулируемая величина не стремится к новому установившемуся значению.
§10.5 Объекты регулирования с запаздыванием.
Все перечисленные
объекты регулирования могут иметь
транспортное запаздывание, при котором
изменение регулируемой величины
начинается спустя некоторое время t
после нанесения возмущения. В этом
случае передаточная функция, полученная
ранее, умножается на величину
![]() :
:
![]()
![]() и т.д.
и т.д.
Переходные характеристики одноемкостных объектов с запаздыванием.

§11. Законы регулирования и регуляторы.
Будем считать, что на вход регулятора подается сигнал ошибки (рассогласование) между заданным и действительным значениями регулируемой величины (рис11.1) е(t)=g(t)-y(t)
Рис. 11.1
Определение: Функциональная связь между выходной величиной регулятора(регулирующим воздействием) u(t) и его входной величиной e(t) называется законом регулирования.
На практике используют следующие типовые законы регулирования:
Пропорциональный закон(П-закон)
В этом случае регулирующее воздействие вырабатывается лишь в зависимости от величины и знака рассогласования. u(t)=F[e(t)]
2. Интегральный закон (И-закон)
u(t)=![]()
3. Пропорционально-интегральный закон (ПИ-закон)
u(t)=F[e(t);![]() ]
]
4. Пропорционально-дифференциальный закон (ПД-закон)
u(t)=F[e(t), e’(t)]
5. Пропорционально-интергрально-дифференциальный (ПИД закон)
u(t)=F[e(t), , e’(t)]
§ 11.1 Пропорциональный регулятор.
Регулятор, регулирующий П-закон регулирования называется пропорциональным (П-регулятор).
У идеального
П-регулятора выходная величина в пределах
зоны регулирования изменяется
пропорционально изменению входной
величины. Уравнение динамики идеального
П-регулятора имеет вид: u(t)=![]()
![]() -
коэффициент передачи регулятора.
=
-
коэффициент передачи регулятора.
=![]()
В динамическом
отношении идеальный П-регулятор
представляет пропорциональное(усилительное)
звено с передаточной функцией
![]() =
=
Рассмотрим особенности процесса регулирования при П-законе. В качестве объекта выберем одноемкостный объект с самовыравниваем рассм. ранее.
Рис. 11.1
Когда в бассейне произойдет отклонение уровня, регулятор тотчас не уменьшит на пропорциональную величину проходное отверстие регулирующего клапана К1.
Приток жидкости
уменьшится, поэтому уровень будет расти
с меньшей скоростью. Дальнейшее закрытие
клапана и соответствующее уменьшение
Q1
происходит по мере увеличения уровня
жидкости. Баланс потоков жидкости
достигается за счет совместного
самовыравнивания (рост Q2)
и уменьшения регулятором потока текущей
жидкости Q1.
Процесс регулирования закончится, когда
установится равенство
![]() (рис 11.2)
(рис 11.2)

Рис. 11.2
Однако регулируемая
величина не вернется к заданному уровню
– в системе будет постоянное по величине
отклонение![]() ,
которое в общем случае называется
установившейся (сшсмичесок) ошибкой
,
которое в общем случае называется
установившейся (сшсмичесок) ошибкой
![]() .
.
Положительным
фактором П-регулятора является его
сшродействие. Из рисунка 11.2 следует что
использование П-регулятора привело к
уменьшению остаточного отклонения по
сравнению со случаем отсутсвия регулятора
(
<![]() .
.