

2 Спеціальна частина
2.1 Вихідні дані для розрахунку
номінальна вантажопідйомність |
|
маса вантажозахоплюючого пристрою |
|
лінійна швидкість підйому вантажу |
|
діаметр барабана |
|
передаточне число від двигуна до барабана |
|
кратність поліспаста |
|
|
|
поліспаста |
|
висота підйому вантажу |
|
тривалість включення |
|
2.2 Кінематична схема та її опис
Кінематична схема механізму підйому електромостового крану наведена на рис. 2.1.
Вона складається з:
електродвигуна 1;
гальма 2;
редуктора 3;
вантажного барабана 4 з піднімальним канатом 5;
поліспаста 6;
вантажозахватного пристрою 7.
Як вантажозахватний пристрій на розглянутому крані використовується гак.

Рис. 2.1 – Кінематична схема механізму підйому електромостового крана
2.3 Принципова електрична схема та її опис
На рис. 2.2 показана електрична
схема управління асинхронним двигуном
з фазним ротором з використанням
контролера типу
![]() ,
який має несиметричну схему і застосовується
для механізмів пересування та підйому.
,
який має несиметричну схему і застосовується
для механізмів пересування та підйому.
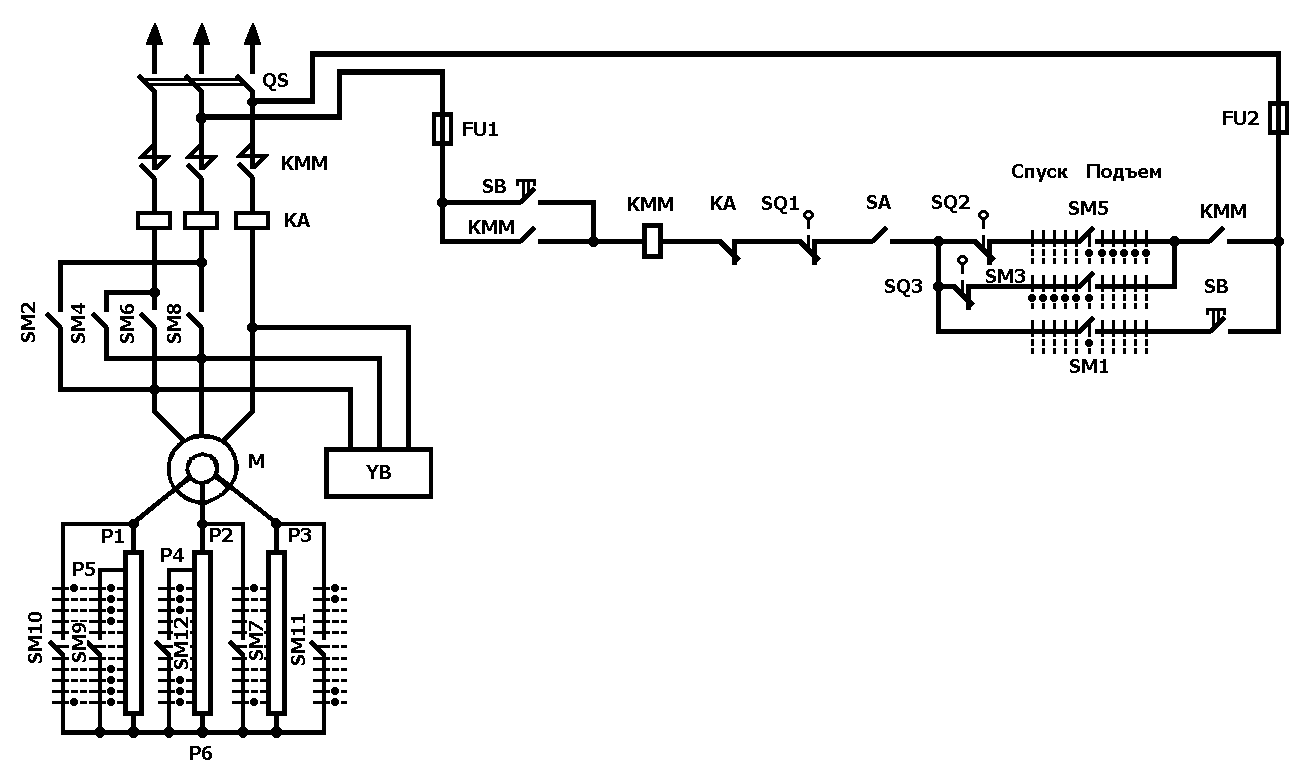
Рис. 2.2 – Схема електрична управління механізмом підйому
електромостового крану
Одна з фаз живильної мережі
підводиться до статора двигуна
![]() безпосередньо, а дві інші фази – через
контролер. У першому положенні «Вперед»
рукоятки контролера замкнуті контакти
безпосередньо, а дві інші фази – через
контролер. У першому положенні «Вперед»
рукоятки контролера замкнуті контакти
![]() ,
,
![]() і статор двигуна включається в мережу
при повністю введених опорах у ланцюзі
ротора. На першому положенні «Назад»
замкнуті контакти
і статор двигуна включається в мережу
при повністю введених опорах у ланцюзі
ротора. На першому положенні «Назад»
замкнуті контакти
![]() і
і
![]() ,
чим забезпечується зміна порядку
чергування фаз напруги на затисках
статора. Одночасно зі статором двигуна
в мережу включається гальмовий
електромагніт
,
чим забезпечується зміна порядку
чергування фаз напруги на затисках
статора. Одночасно зі статором двигуна
в мережу включається гальмовий
електромагніт
![]() ,
який розгальмовує механізм.
,
який розгальмовує механізм.
При подальшому переміщенні
рукоятки контролера в положення 2–5
«Вперед» або «Назад» замикаються
контакти
![]() ,
,
![]() ,
,
![]()
![]() ,
,
![]() ,
,
![]() і шунтуються ступені пускових резисторів
у ланцюзі ротора двигуна. Резистори
виводяться по фазах несиметрично, що
дозволяє зменшити число перемикаючих
контактів контролера при необхідному
числі пускорегулювальних ступенів. При
пуску оператор повинний переводити
рукоятку контролера з одного положення
в інше з деяким інтервалом часу, у
противному випадку можуть виникнути
неприпустимі кидки струмів і моментів
двигуна.
і шунтуються ступені пускових резисторів
у ланцюзі ротора двигуна. Резистори
виводяться по фазах несиметрично, що
дозволяє зменшити число перемикаючих
контактів контролера при необхідному
числі пускорегулювальних ступенів. При
пуску оператор повинний переводити
рукоятку контролера з одного положення
в інше з деяким інтервалом часу, у
противному випадку можуть виникнути
неприпустимі кидки струмів і моментів
двигуна.
Схема забезпечує захист
двигуна від перевантажень по струму за
допомогою групового максимального реле
![]() .
За допомогою контактів
.
За допомогою контактів
![]() ,
,
![]() ,
,
![]() створюються ланцюги кінцевого і нульового
захисту. Усі види захистів діють на
відключення контактора
створюються ланцюги кінцевого і нульового
захисту. Усі види захистів діють на
відключення контактора
![]() .
.
2.4 Розрахунок і вибір потужності електродвигуна
2.4.1 Вибір електродвигуна
Зважаючи
на те, що при підйомі вантажу статичний
момент на валу двигуна незначно
відрізняється від номінального моменту
двигуна, вибираємо двигун по статичній
потужності при підйомі вантажу
![]()
|
|
де
![]() – вага вантажу,
– вага вантажу,
![]()
|
|
|
|
![]() – вага вантажозахоплюючого пристрою,
– вага вантажозахоплюючого пристрою,
|
|
|
|
![]() – загальний
механізму
– загальний
механізму
|
|
|
|
|
|
Номінальна частота обертання обираного
двигуна
![]()
|
|
|
|
Тому що задана
![]() роботи механізму не відрізняється від
стандартної
роботи механізму не відрізняється від
стандартної
![]() ,
для якої приведені технічні дані
електродвигуна, потужність
,
для якої приведені технічні дані
електродвигуна, потужність
![]() перерахувати не потрібно:
перерахувати не потрібно:
|
|
|
|
Вибираємо двигун [1, стор. 58] з технічними даними, наведеними у таблиці 2.1.
Таблиця 2.1 – Технічні дані обраного двигуна
тип |
|
номінальна потужність |
|
номінальний струм статора |
|
номінальний струм ротора |
|
номінальна напруга статора |
|
номінальна напруга ротора |
|
номінальна частота обертання |
|
момент інерції двигуна |
|