

Управление пуском – остановом электродвигателя
На рис. показана упрощенная схема подключения датчиков к МКС управления, контроля напряжения силовой сети и выдачи сигнала для включения или выключения двигателя.
Датчик напряжения (Дн) выполнен на оптронном транзисторе, что обеспечивает гальваническую развязку между силовой цепью и цепями управления на вводе сигналов . Для гальванической развязки и для усиления сигнала управления двигателем на выходе используется контактор К (катушка и силовые контакты) .
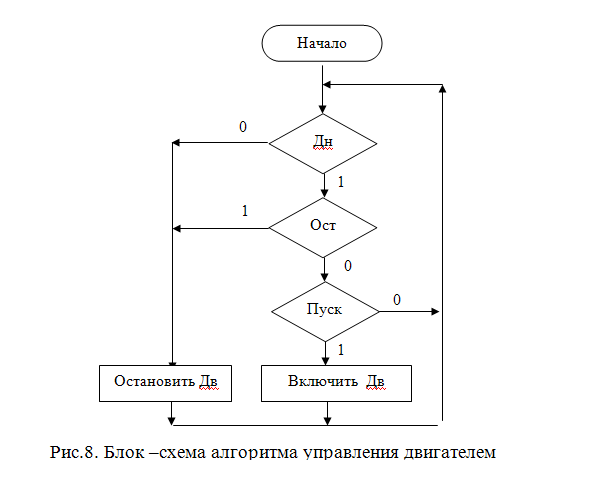
Для проверки и отладки программы на модели будем предполагать, что кнопка «Пуск» имитируется разрядом Р1.0 порта контроллера, кнопка останова «Ост» имитируется разрядом Р1.1 , датчик наличия напряжения сети имитируется разрядом Р1.2, а сигнал управления на включение электродвигателя формируется через порт Р2.5. Алгоритм работы пускателя электродвигателя представлен на рис.8.
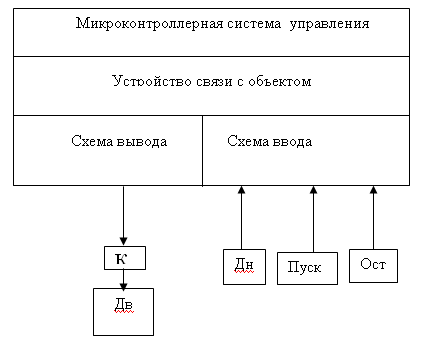
Рис . Структурная схема МКС управления пуском двигателя
Если напряжение в сети отсутствует (Дн=0), то двигатель останавливается, а если напряжение есть (Дн=1), то проверяется состояние управляющих кнопок «Ост» и «Пуск». Кнопка «Ост» имеет более высокий приоритет и поэтому проверяется раньше. Если кнопка «Ост» нажата («Ост»=1) , то двигатель останавливается, иначе переходим к проверке кнопки «Пуск». Если кнопка «Пуск» нажата («Пуск=1» , то двигатель включается , иначе состояние двига
теля не изменяется.
Для подключения датчиков будем использовать порт Р1, а для двигателя – порт Р2 . Таблица истинности, отражающая алгоритм управления двигателем, имеет следующий вид:
Дн (Р1.2) |
Ост (Р1.1) |
Пуск (Р1.0) |
Дв (Р2.5) |
0 |
х |
х |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
Для подключения датчиков будем использовать порт Р1, а для двигателя – порт Р2 . Таблица истинности, отражающая алгоритм управления двигателем, имеет следующий вид:
Дн (Р1.2) |
Ост (Р1.1) |
Пуск (Р1.0) |
Дв (Р2.5) |
0 |
х |
х |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
В таблице символ «х» отражает, что при значении Дн =0 значение кнопок «Пуск» и «Ост» не имеет значения. Подключение датчика Дн , кнопок Пуск, Ост, а также двигателя Дв к портам контроллера показаны в таблице истинности.
Текст программы имеет следующий вид :
$mod812
M1: CLR P2.5
М2: JNB P1.2 , M1; проверка датчика напряжения
JB P1.1 , M1 ; проверка кнопки останов
JNB P1.0 , M1; проверка кнопки пуск
SETB P2.5 ; пуск двигателя
JMP M2
END
Время выполнения: 11 мкс.
Размер программы: 18 Байт