

Электромеханические устройства - это класс технических средств автоматики, в основе работы которых лежит электромеханическое преобразование энергии и сигналов.
В таких устройствах электромеханическое преобразование как правило сопровождается электромагнитным преобразованием энергии.
Как и всякая классификация, эта классификация в определённой мере условная. Контактные реле имеют подвижные части, но рассматривают их обычно в теории электромагнитных устройств. Трансформаторы не имеют подвижных частей, но рассматривают их обычно в теории электромашинных устройств. Подавляющее большинство электромеханических устройств составляют электромашинные устройства. Электромашинные устройства – это класс технических средств, включающий в себя как классические электрические машины (двигатели, генераторы), так и специальные устройства, выполненные на базе электрической машины и предназначенные для различных функциональных преобразований в системах автоматического управления.
Классификация электрических машин осуществляется по многим параметрам, например по выходной мощности, по частоте вращения машины, по степени защиты от внешних воздействий, способу охлаждения, функциональным признакам и т.д.
Категории электромеханических устройств автоматики принадлежат:
- трансформаторы
- асинхронные и синхронные машины
- электромашинные преобразователи угловых перемещений
- машины постоянного тока.
Реле́ (фр. relais) — электромеханическое устройство (выключатель), предназначенное для коммутации электрических цепей при заданных изменениях электрических или неэлектрических входных величин. Различают электромагнитные, пневматические и температурные реле.
В электронной схемотехнике иногда электронные блоки с функцией переключения цепи по изменению какого-либо физического параметра также называют реле. Например, фотореле, реле контроля фаз или реле-прерыватель указателей поворота автомобиля.
Классификация реле
По начальному состоянию контактов выделяются реле с:
Нормально замкнутыми контактами;
Нормально разомкнутыми контактами;
Переключающимися контактами.
По типу управляющего сигнала выделяются реле:
Постоянного тока;
Нейтральные реле: полярность управляющего сигнала не имеет значения, регистрируется только факт его присутствия/отсутствия. Пример: реле типа НМШ;
Поляризованные реле: чувствительны к полярности управляющего сигнала, переключаются при её смене. Пример: реле типа КШ;
Комбинированные реле: реагируют как на наличие/отсутствие управляющего сигнала, так и на его полярность. Пример: реле типа КМШ;
Переменного тока.
По допустимой нагрузке на контакты.
По времени срабатывания.
По типу исполнения
Электромеханические реле;
Электромагнитные реле (обмотка электромагнита неподвижна относительно сердечника);
Магнитоэлектрические реле (обмотка электромагнита с контактами подвижна относительно сердечника);
Термореле (биметаллическое);
Герконовые реле.
По контролируемой величине
Реле напряжения;
Реле тока;
Реле мощности;
Реле пневматического давления;
Реле контроля изоляции;
Обозначение на схемах
На схемах реле обозначается следующим образом:
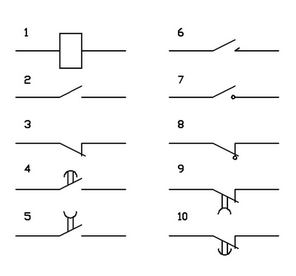
1 — обмотка реле (управляющая цепь), 2 — контакт замыкающий, 3 — контакт размыкающий, 4 — контакт замыкающий с замедлителем при срабатывании, 5 — контакт замыкающий с замедлителем при возврате, 6 — контакт импульсный замыкающий, 7 — контакт замыкающий без самовозврата, 8 — контакт размыкающий без самовозврата, 9 — контакт размыкающий с замедлителем при срабатывании, 10 — контакт размыкающий с замедлителем при возврате.
Особенности работы
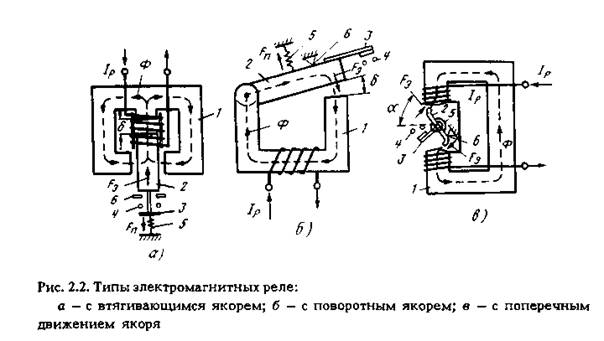
Устройство и принцип действия электромагнитных реле. Принцип действия электромагнитных реле основан на притяжении стальной подвижной системы к электромагниту при прохождении тока по его обмотке [15,22]. На рис.2.2 представлены три основные разновидности конструкций электромагнитных реле, содержащих: электромагнит 1, состоящий из стального магнитопровода и обмотки; стальную подвижную систему (якоря) 2, несущую подвижный контакт 3; неподвижные контакты 4; противодействующую пружину 5. Проходящий по обмотке электромагнита ток Iр создает магнитодвижущую силу (МДС) wPIP, под действием которой возникает магнитный поток Ф1, замыкающийся через магнитопровод электромагнита 1, воздушный зазор δ и подвижную систему 2. Якорь намагничивается, появляется электромагнитная силаFЭ, притягивающая якорь к полюсу электромагнита. Если сила FЭ преодолевает сопротивление пружины, то якорь приходит в движение и своим подвижным контактом 3 замыкает неподвижные контакты реле 4. При прекращении или уменьшении тока Iр до значения, при котором сила FЭ становится меньше силы FПсопротивления пружины 5, якорь возвращается в начальное положение, размыкая контакты 4.
![]() 1
При питании обмотки реле переменным
током Iр
= Imsinwt под Фподразумевается
мгновенное значение потока Фt =
Фmsinwt или
его действующее значение.
Начальное
и конечное положения якоря ограничиваются
упорами 6.
1
При питании обмотки реле переменным
током Iр
= Imsinwt под Фподразумевается
мгновенное значение потока Фt =
Фmsinwt или
его действующее значение.
Начальное
и конечное положения якоря ограничиваются
упорами 6.
 Силы
и момент, действующие на подвижную
систему реле. Как
известно [10], электромагнитная сила FЭ,
притягивающая стальной якорь к
электромагниту и вызывающая движение
якоря, пропорциональна квадрату
магнитного потока Ф в
воздушном
зазоре:
Силы
и момент, действующие на подвижную
систему реле. Как
известно [10], электромагнитная сила FЭ,
притягивающая стальной якорь к
электромагниту и вызывающая движение
якоря, пропорциональна квадрату
магнитного потока Ф в
воздушном
зазоре:
![]() (2.1)
Магнитный поток Ф и
создающий его ток IP связаны
соотношением
(2.1)
Магнитный поток Ф и
создающий его ток IP связаны
соотношением
![]() (2.2)
где RM –
магнитное сопротивление пути1, по
которому замыкается магнитный
поток Ф; wP –
количество витков обмотки реле.
Магнитное
сопротивление магнитопровода
электромагнита RM состоит
из сопротивления его стальной части RC и
воздушного зазора δ RВ.З:
(2.2)
где RM –
магнитное сопротивление пути1, по
которому замыкается магнитный
поток Ф; wP –
количество витков обмотки реле.
Магнитное
сопротивление магнитопровода
электромагнита RM состоит
из сопротивления его стальной части RC и
воздушного зазора δ RВ.З:
![]() ,
Подставив
(2.2) в (2.1),
получим
,
Подставив
(2.2) в (2.1),
получим
![]() (2.3)
У реле с поворотным якорем и с
поперечным движением якоря (рис.2.2, б, в)
электромагнитная сила FЭобразует
вращающий
момент
(2.3)
У реле с поворотным якорем и с
поперечным движением якоря (рис.2.2, б, в)
электромагнитная сила FЭобразует
вращающий
момент
![]() (2.4)
где d -
плечо силы FЭ.
Из
(2.3) и (2.4) следует, что сила притяжения FЭ и
ее момент Мэ пропорциональны
квадрату тока I2Р в обмотке реле и имеют,
следовательно, постоянное направление,
не зависящее от направления (знака)
этого тока. Поэтому электромагнитный
принцип пригоден для выполнения реле
как постоянного, так и переменного тока
и широко используется для изготовления
измерительных реле тока, напряжения и
вспомогательных реле логической части:
промежуточных, сигнальных и реле времени.
(2.4)
где d -
плечо силы FЭ.
Из
(2.3) и (2.4) следует, что сила притяжения FЭ и
ее момент Мэ пропорциональны
квадрату тока I2Р в обмотке реле и имеют,
следовательно, постоянное направление,
не зависящее от направления (знака)
этого тока. Поэтому электромагнитный
принцип пригоден для выполнения реле
как постоянного, так и переменного тока
и широко используется для изготовления
измерительных реле тока, напряжения и
вспомогательных реле логической части:
промежуточных, сигнальных и реле времени.
![]()
1
Магнитное сопротивление RM участков
магнитной цепи Rc и RB.З пропорционально
его длине l и
обратно пропорционально сечению
участка S и
абсолютной магнитной проницаемости ![]() При
перемещении якоря электромагнитного
реле в сторону срабатывания уменьшаются
воздушный зазорδ (рис.2.2)
и соответственно RM.
При постоянстве тока в реле
уменьшение RM вызывает
увеличение магнитного потока Ф (2.3),
что обусловливает возрастание Fэ и Мэ (2.4).
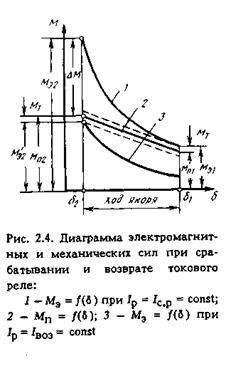
У
реле с поперечным движением якоря и с
втягивающимся якорем поле в воздушном
зазоре нельзя считать однородным. Для
этих конструкций зависимости RM = ¦(δ), Fэ
= ¦(δ) и Мэ
= = ¦ (α) имеют
сложный характер (рис.2.2, а, б).
Силу Fэ и
момент Мэ можно
выразить через производную магнитной
проводимости воздушного зазора [10]
уравнением
При
перемещении якоря электромагнитного
реле в сторону срабатывания уменьшаются
воздушный зазорδ (рис.2.2)
и соответственно RM.
При постоянстве тока в реле
уменьшение RM вызывает
увеличение магнитного потока Ф (2.3),
что обусловливает возрастание Fэ и Мэ (2.4).
У
реле с поперечным движением якоря и с
втягивающимся якорем поле в воздушном
зазоре нельзя считать однородным. Для
этих конструкций зависимости RM = ¦(δ), Fэ
= ¦(δ) и Мэ
= = ¦ (α) имеют
сложный характер (рис.2.2, а, б).
Силу Fэ и
момент Мэ можно
выразить через производную магнитной
проводимости воздушного зазора [10]
уравнением
![]() (2.5)
где GB.З -
магнитная проводимость воздушного
зазора, равная 1/RВ.З.
Сила
(момент), противодействующая движению
подвижной системы реле, создается
пружиной (Fп
и Мп),
трением и тяжестью подвижной системы
(FTи МТ).
При движении якоря на замыкание
контактов Fп
и Мп
увеличиваются с уменьшением δ по
линейному закону: Мп
= ka. (рис.2.3, а);
сила трения FT остается неизменной.
Токи
срабатывания и возврата реле, коэффициент
возврата. Ток
срабатывания.
Реле начинает действовать,
когда
(2.5)
где GB.З -
магнитная проводимость воздушного
зазора, равная 1/RВ.З.
Сила
(момент), противодействующая движению
подвижной системы реле, создается
пружиной (Fп
и Мп),
трением и тяжестью подвижной системы
(FTи МТ).
При движении якоря на замыкание
контактов Fп
и Мп
увеличиваются с уменьшением δ по
линейному закону: Мп
= ka. (рис.2.3, а);
сила трения FT остается неизменной.
Токи
срабатывания и возврата реле, коэффициент
возврата. Ток
срабатывания.
Реле начинает действовать,
когда
![]() или
Мэ = Мэ.с.р = Мп
+ Мт.
(2.6)
Наименьший
ток, при котором реле срабатывает,
называется током срабатывания Iср.
или
Мэ = Мэ.с.р = Мп
+ Мт.
(2.6)
Наименьший
ток, при котором реле срабатывает,
называется током срабатывания Iср.
 В
реле, выполняющих функции ИО,
предусматривается возможность
регулирования Iср изменением
числа витков обмотки реле (ступенями)
и момента, противодействующей
пружины МП (плавно).
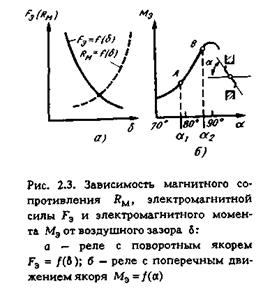
Ток
возврата. Возврат
притянутого якоря в исходное положение
происходит при уменьшении тока в обмотке
реле под действием пружины 5 (см.
рис.2.2), когда момент МП преодолевает
электромагнитный момент МЭ.ВОЗ и
момент трения МТ.
Как следует из рис.2.4, это произойдет
при соблюдении
условия
В
реле, выполняющих функции ИО,
предусматривается возможность
регулирования Iср изменением
числа витков обмотки реле (ступенями)
и момента, противодействующей
пружины МП (плавно).
Ток
возврата. Возврат
притянутого якоря в исходное положение
происходит при уменьшении тока в обмотке
реле под действием пружины 5 (см.
рис.2.2), когда момент МП преодолевает
электромагнитный момент МЭ.ВОЗ и
момент трения МТ.
Как следует из рис.2.4, это произойдет
при соблюдении
условия
![]() (2.7)
где
МЭ'2 - момент, при котором начинается
возврат реле.
Током
возврата реле IВОЗ называется
наибольшее значение тока в реле, при
котором якорь реле возвращается в
исходное положение.
Коэффициент
возврата. Отношение
токов IВОЗ /Iср называется
коэффициентом возврата
кB:
(2.7)
где
МЭ'2 - момент, при котором начинается
возврат реле.
Током
возврата реле IВОЗ называется
наибольшее значение тока в реле, при
котором якорь реле возвращается в
исходное положение.
Коэффициент
возврата. Отношение
токов IВОЗ /Iср называется
коэффициентом возврата
кB:
 (2.8)
У
реле, реагирующих на возрастание
тока, Iс.р
> IВОЗ и kB <
1.
Из
диаграммы (рис.2.4) следует, что чем больше
избыточный момент ΔM и
момент трения МT,
тем больше разница между IВОЗ и Iс.р и
тем меньше kB.
,
(2.8)
У
реле, реагирующих на возрастание
тока, Iс.р
> IВОЗ и kB <
1.
Из
диаграммы (рис.2.4) следует, что чем больше
избыточный момент ΔM и
момент трения МT,
тем больше разница между IВОЗ и Iс.р и
тем меньше kB.
,