

Назначение виды и классификация первичных измерительных преобразователей.
Измерительный преобразователь (первичный преобразователь, датчик) это средство измерений (устройство), с помощью которого информация о состоянии объекта (физическая величина или технологический параметр) преобразуется в форму, обеспечивающую возможность передачи и дальнейшей обработки (преобразования) этой информации, но не поддающуюся непосредственному восприятию наблюдателем. Первичный преобразователь с высокой точностью реализует однозначную зависимость между двумя физическими величинами Y = F(Х),где X= X( t ) и Y=Y (t ) – сигналы на входе и выходе преобразователя.Измерительный преобразователь (датчик) включает чувствительный элемент, который собственно и воспринимает измеряемую физическую величину и преобразователь отклика датчика на воздействие этой физической величины в другую форму. Входной величиной датчика могут быть любые физические величины – давление, скорость, усилие, температура, перемещение , расход, масса, концентрация и т.д. На выходе датчика, как правило, мы имеем электрический сигнал.
Первичные измерительные преобразователи очень разнообразны по принципу действия, устройству, виду энергии входного сигнала, метрологическим и эксплуатационным характеристикам.
Существуют параметрические ПП для которых характерно то, что
сигналы, получаемые от измеряемого объекта, служат только для управления энергией постороннего источника, включенного в электрическую цепь. В данном случае основным выходным сигналом является изменение параметров электрических цепей- сопротивления, емкости, индуктивности под действием сигнала от измеряемого объекта, поэтому эти ПП называются параметрическими.
Генераторные ПП характеризуются тем, что сигналы, получаемые от измеряемого объекта, непосредственно преобразуются в электрические сигналы. При этом желаемый эффект преобразования может быть получен без использования посторонних источниковэнересь основой работы является непосредственное преобразование измеряемых сигналов различных видов в электрические сигналы (генерирование электрической энергии).
По физической природе явлений, лежащих в основе их работы, первичные преобразователи можно подразделить на:
- механические резистивные (контактные, реостатные, тензометрические)
-электростатические (емкостные, пьезоэлектрические)
-электромагнитные (индуктивные, индукционные, магнитоупругие)
-теплоэлектрические (термоэлектрические, терморезистивные)
-оптико-электрические
-атомные (ионизационного излучения, квантовые) и множество других.
2 Принцип работы индуктивных измерительных преобразователей и область их применения.
Индуктивный измерительный преобразователь представляет собой электромагнит с обмоткой и подвижным якорем, перемещающийся под действием измеряемой величины Х. Изменение длины воздушного зазора приводит к изменению индуктивности обмотки L. Такие преобразователи обычно применяются при перемещении якоря на 0,01…5 мм.
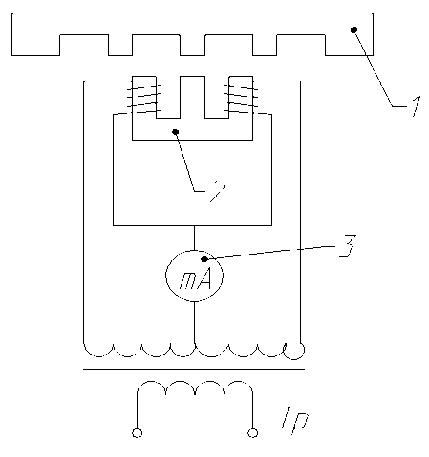
Рисунок 1 – Схема индуктивного датчика
На подвижной части станка устанавливается тонкая рейка из магнитомягкого материала. Выступы рейки 1 модулируют магнитное сопротивление рабочего зазора при движении. Магнитопровод Ш-образного сердечника 2 имеет две обмотки, включенные навстречу друг другу и питаемые от трансформатора Тр. В диагональ индуктивного моста включен измерительный прибор. В среднем положении измерительный мост сбалансирован и стрелка прибора 3 будет стоят на нуле. Незначительный разбаланс приводит к отклонению стрелки прибора. Хорошо выполненный датчик улавливает перемещения ~2 мкм.Датчики индуктивности широко применяют благодаря их существенным достоинствам: простоте, надежности и отсутствию скользящих контактов; возможности непосредственного использования показывающих приборов за счет относительно большой величины отдаваемой электрической мощности; возможности работы на переменном токе промышленной частоты.Основной областью применения индуктивных датчиков является измерение угловых и линейных механических перемещений. Изменение входного параметра в датчиках индуктивности преобразуется в изменение индуктивности катушки благодаря перемещению якоря, сердечника или катушки.