

1.
Математическое
моделирование называется
процесс составления математич. одели,
решение любой задачи невозможно без
математ-кой модели. Для этого нужно
:
1) выделить учавствующие задачи и
величины
2) определить какте величины
неизвестны, какие найти
3) определить
взаимозависимости между величинами,
если они есть
Каждая модель
содержит много факторов.Требования,
предъявляемые к математической модели.
Основные требования следующие:
входит 3 составные
части:
разрешимость,
единственность, и устойчивость.
Разрешимость
означает, что решение должно быть.
Под единственностью
понимается единственность решения.
Устойчивость означает, что малые
изменения начальных данных не должны
приводить к большим изменениям
результата.
Основные
типы задач,
возникающих при математическом
моделировании
1) Достаточность означает, что модель должна содержать достаточно величин и соотношений , чтобы получить решение задач.
2) Адекватность означает , что расчетные результаты должны соответствовать - не обязательно совпадать действительным
3) Корректность - сложное требование. В понятие корректность
1) Решение алгебраических, линейных, трансцендентных уравнений и систем уравнений.
2) Решение диф. Уравнений и систем диф. Уравнений.
3) Обработка результатов эксперимента.Аппроксимация (приближение) функций.
4) Решение задач оптимизации.
5) Решение интегральных уравнений и систем таких иуравнений. И т.Д.
6) Планирование эксперимента.
7) Задачи оптимизированного управления и др.
13.
Интерполяцией
называют
отыскание видов функций f(x)
мет.узлами таб. По зада.значениям f(x1)
в узлах таблицы, получ.формул,работает
только для [x1,xn]
Рассмотрим таблицу
значений х,у
Х х1 х2 …
хn
У у1 у2
… уn
Известно,что х
зависит от у , причем f(xk)=yk,k=1,2,..n.
Интерпол.многочлен Лагранжа Lk(x)-это
единст.
Многочлен.степени
не выше <=n-1,
который выч.по формуле
n
Lk(x)=Σ
yklk(x)
, где уn
из таблицы
k=1
Lk(x)=(x-x1)(x-x2)(..)(x-x
k-1)(x-
x
k+1)
..(x-xn)
/
(xk-x1)(xk-x2)(…)(xk-
x k-1) (x- x k+1) .. (xk-xn)
Причем выполняется
условие , что Lk(xi)=
1,k=i
0,k≠i
Известно
, что для многочл.Лагранжа выполняется
условие
Lk(xk)=yk
2.
Чаще применяют
численные методы, при этом возникают
различные ошибки-погрешности.
Различают:
погрешности метода, начальные погрешности,
остаточные погрешности, погрешности
округления .
Еще сущ-ют абсолютные
и относительные погрешности
Пусть
х-число x̃
–его приближенное значение
Тогда
абсолютной погрешностью называют
величину Δх=|х- x̃
|, а относительной
x̃
=х- x̃/|
x̃
| = Δх /| x̃
При
решении числ-ми методами точное значение
х неизвестно,поэтому невозможно
вычислить погрешность, в таких случаях
ищут предельные погрешности.
если
сущ-ет величина Δ x̃
, что |Δx|<|Δ x̃
| , то Δ x̃
наз-ся предельной абсолютной погрешностью,
а δ Δ x̃=
Δ x̃
/| x̃
| - предел.относит.погрешность
Численные
методы решения нелинейных ур-ний
f(x)=0
Решаем
ур-е f(x)=0,
если f(x)-нелинейн.функ.,то
ур-е будет назыв.нелинейным,в частных
случаях,например,f(x)=ax²+bx+c
и др.оно решается точно,чаще оно точно
не решается,числин.методы,называемые
итерационными+шаг,такие методы выполн.в
2 этапа:
1)ищут приближенные
решения или отрезка [а,в] с одни корнем
ур-я f(x)=0
2)уточняют
приближенное решение до заранее заданной
точности ε(малое)ε=0.001 при этом говорят
, что ур. f
(x)=0
решено с точностью ε
3.
Для уравн. F(x)=0
находим обычно графически отрезок
[а,в] с одним корнем, должно выполняться
условие f(a)·f(b)<0
– условие выбора [а,в]
Затем делим
[а,в] пополам х0=а+в/2 →[а;х0] и [х0;в] оставляем
тот,на концах которого f(x)
имеет разные знаки , другой отбрасываем
Пример :
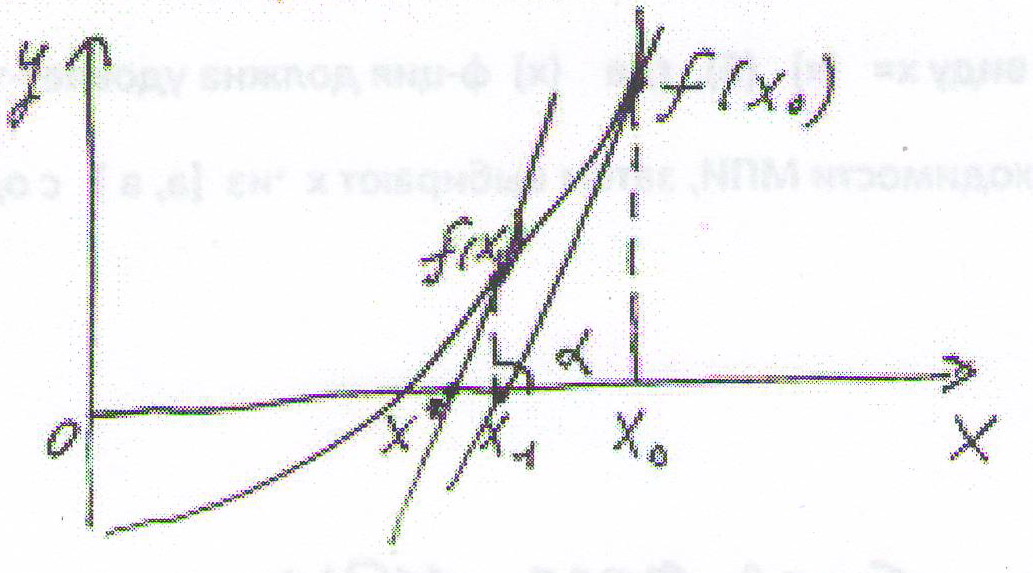
4.
Известно , что ур-е
1-ой касательной имеет вид у1-у0=f
′ (x0)(x1-x0)
т.к. у0=f(x0)
у1≈0
,т.к. f(х)=0
, то х1=х0 - f(x0)/
f
′ (x0)
x2=
x1-
f(x1)/
f
′ (x1)
итер.ф-ла Ньютона х к+1 = хк - f(xк)/
f
′ (xк)
х0 выбираем из условия f(х0)
· f
′′(х0)>0
Достоинства: быстрая
расходимость при удачном выборе х
Недостатки: метод
применим только дл ф-ции f
′ , f
′′ , причем f
′ (xк)
≠0
 Новый
отрезок снова делим пополам х1=а+х0/2
→[а;х1] и [х1;х0] ….
продожаем до тех
пор , пока на каком-то шаге не выполнится
одно из условий окончаний итер-ного
процесса:
а) |х к+1 - хк| <= ε
б) |
f(xk)|
<= ε
Достоинства: можно решить ур-е
с любой точностью
Недостатки:
трудоемкость,медленная сходимость
Новый
отрезок снова делим пополам х1=а+х0/2
→[а;х1] и [х1;х0] ….
продожаем до тех
пор , пока на каком-то шаге не выполнится
одно из условий окончаний итер-ного
процесса:
а) |х к+1 - хк| <= ε
б) |
f(xk)|
<= ε
Достоинства: можно решить ур-е
с любой точностью
Недостатки:
трудоемкость,медленная сходимость
5.
ур-е
f(x)=0
приводят к виду х=ψ(х), где ψ(х)-ф-ция
должна удовлетворять условию
0<|ψ(x)|<1
– условие сходимости МПИ , затем выбирают
х из [а,в] с одним корнем ур-ния f(x)=0
х1=
ψ(х0), х2= ψ(х1)
х к+1 = ψ(хк) – итер.формула
МПИ
Решение продолжают пока не
выполниться условие а) |x к+1 -хк| <=ε
б) |f(xk)|<=ε
, перейти от 1 к 6 можно по разному :
|:
обе части f(x)=0
на - N
, и прибавив к обеим частям Х
- f(x)/
N=0
x-
- f(x)/
N=
0+X
x=x-
f(x)/
N
N
найдем из условия сходимости
0< |1
- - f
′ (x)/
N|
<1
затем примен.формул. x к+1= хл-
f(xк)/
N
6
Метод Гаусса
состоит из прямого и обратного хода
В прямом СЛАУ
приводиться к треугольному виду. В
обратном ищется неизвестные начиная
с последнего
Метод Крамера
решение ищут по формуле:
Xj=Dj/D
D=DltA
не равно 0 Dj
определители получаются из D
после замены j
Столбца на столбец
правой части
Пример
5x+y=6
5x+x2=6 x-4y=3
x1-4x2=-3 A=(5
1) D1=(6 1)
(1-4) ( -3-4)
=-21 D=dltA=5
1=-21
1 -4
D2=5
6=-21
1 -3
X1=D1/D=1
x2=D2/D=1
Берем программу
из двух функций A11x1+a12x2=b1 A21x1+a22x2=b2 INPUT A11,a12,b1,a21,a22,b2 D=a11*a22-a12*a21 D1=b1+a22-b2*a12 D2=… X1=D1/D X2=D2/D Print
x1,x2
7
Метод прогонки
яв-ся модефикацией метода Гаусса.
Применяется только для СЛАУ с 3-х
диагональной ленточной матрицей,такие
СЛАУ имеют вид:
акх к-1 +вкхк+скх
к-1=dк
а1=0
сn=0
к=1,2,..n
(1)
Здесь а,в,с,d
–известные , х,к-неизвестные
Запишем
СЛАУ при n=3
к=1
в1х1+с1х2 =d1
к=2 а2х1+в2х2+с2х3=
d2
к=3
а3х2+в3х3= d3
Метод
прогонки имеет прямой ход и обратный
– в прямом ищут прогоночные коэф.-ты,
в обратном находят неизвестные,начиная
с последнего . решение ищут по ф-ле
хк=uкх
к-1 +vк
(2)
Прямой ход
Найдем Uk
и Vk
для этого подставим в (1) замену для
хк-1, полученной из (2)
ак(u
к-1 хк+v
к-1)+вкхк+скх к-1=dk
(ак
u
к-1+вк)хк= dk
- скх к-1-акvк-1
Найдем хк= -ск/ак
u
к-1+вк · х к-1 +dk-akvk-1/ak
u
к-1+bk
Сравнивая эту
формулу с (2)
хк=uk
x
к-1 +vk
Uk=
- ck/ak
u
к-1 +b1
Vk=dk-akv
к-1/ak
u
к-1+bk
U1=c1/b1
u2=- c2/a2u1+b2 V1=d1/b1
v2=d2-a2v1/a2u1+b2 Ur=0
Vk=dk-ak·v
к-1
/ak u к-1+bk
Uk=-ck/ak u
к-1+bk
Vk=dk-akv
к-1/ak
u к-1+bk
Найдем неизвестные
начиная с последнего
Xk=uk
x
к+1 +vk
Xn=un
x
к+1 +vn=vn
x
n-1
= u
n-1
xn+
vк-1=
u
n-1
vn
+ vк-1 x1=u1x2+v1