

5 Система управления выпрямителем
Так как проектируемый выпрямитель предназначен для регулирования скорости электроподвижного состава, машинист должен иметь возможность из кабины управления изменять угол регулирования α, т.е. изменять во времени момент включения тиристоров VS1 и VS2. Как известно, тиристоры отпираются при подаче на их управляющие электроды напряжения, например, в виде импульса. Управляющий импульс должен иметь нужные параметры, чтобы надежно отпирать тиристор (амплитуду тока, продолжительность, крутизну переднего фронта). Чтобы обеспечить эти параметры необходимо устройство, называемое формирователем импульсов – Ф.
Поскольку управляющие импульсы должны подаваться на управляющие электроды тиристоров плеч VS1 и VS2 в разные полупериоды (см. рис.2), то нужно либо иметь по одному блоку Ф для каждoго плеча, либо при одном блоке сделать так, чтобы импульсы управления достигали нужного тиристорного плеча выпрямителя только в нужный полупериод.
Так как тиристорные плечи VS1 и VS2 могут состоять из определенного числа последовательно и параллельно включенных вентилей (см. рис.9), блок Ф должен иметь значительную мощность, чтобы обеспечить все вентили импульсами с нужными для надежного отпирания параметрами. Если же блок Ф имеет ограниченную мощность, то между ним и тиристорами обязателен выходной усилитель – ВУ.

a)

б)
а) диодное; б) тиристорное.
Рисунок 9 - Плечо моста выпрямителя с защитными элементами
Так как тиристоры, в том числе и их управляющие электроды, могут находиться под высоким и опасным для человека напряжением, что свойственно электроподвижному составу, необходимо отделить высокое напряжение силовых цепей от цепей управления (осуществить электрическую развязку). Поэтому последним звеном между системой управления выпрямителем и управляющими электродами тиристоров являются импульсные трансформаторы ИТ.
Структурная схема одного из возможных вариантов системы управления выпрямителем показана на рис.10 /1/.
Здесь ДВП – двухполупериодный выпрямитель, связанный со специальной низковольтной обмоткой трансформатора, питающегося от контактной сети, необходим для синхронизации процессов в силовой цепи и цепях управления. ДВП управляет генератором пилообразного напряжения ГПН, где острие зубца, как это показано на рис.11, совпадает с концом одного и началом другого полупериода питающего напряжения.
Машинист с помощью контроллера машиниста КМ, подает напряжение управления Uупр, величину которого он может менять рукояткой контроллера, в блок К – компаратор, имеющий два входа и один выход. На второй вход К подается пилообразное напряжение от ГПН. Функция компаратора – наложить пилообразное напряжение на напряжение управления Uупр и в точке их пересечения подать на выход сигнал в виде прямоугольника напряжения Uк (см.рис.11).
Выход К соединен с Ф, в котором формируется управляющий импульс в момент, когда Uупр = Uгпн . Так как этот момент с изменением Uупр может "плавать" в интервале времени π > ωt > 0, то и α может изменяться в этих же пределах. С учётом того, что коммутационные процессы сужают интервал регулирования от αmin до αmax, (см. раздел 4.1), пределы регулирования Uупр также изменятся.
Предположим, что скорость изменения напряжения управления во времени постоянна и равна d Uупр /dt = M в/мс.
Тогда при частоте переменного напряжения в контактной сети fc=50гц (стандарт в РФ) интервал времени ωt = 2π содержит t = 1/50 = 0,02с = 20мс. При этом величина напряжения управления:

где М=1-2В/мс.
Подставив в (36) αmin (10) и αmax (11), получим пределы Uупр min и Uупр max для заданного тока Id.
Так как в схеме на рис. 10 имеется один блок Ф, то блоки ОПВ - однополупериодные выпрямители и ЛЭИ - логические элементы "И" служат для того, чтобы подавать импульсы управления в нужный полупериод на соответствующую группу тиристоров VS1 и VS2. Логические элементы “И” имеют по два входа и по одному выходу. Если на оба входа одновременно подаются напряжения от Ф и ОПВ, то на выход подаётся импульс для усиления. Если же напряжение поступает на любой один вход ЛЭИ, то импульс в ВУ не поступает.
Как известно, импульс на управляющем электроде тиристора должен иметь определенные параметры. Одним из таких параметров является его продолжительность во времени.
Дело в том, что тиристор надёжно отпирается тогда, когда силовой ток, проходящий через него, успевает за время продолжительности импульса управления достичь определенной величины тока удержания IL. Нo в цепи этого тока имеются индуктивности цепи выпрямленного тока Id и трансформатора LT (см. 4.1; 4.4), которые препятствуют как нарастанию, так и уменьшению тока, поэтому, если импульс управления имеет малую продолжительность во времени, то тиристор может не включиться.
В связи с этим возникает необходимость рассчитать минимальную продолжительность импульса tи (см. рис.11).
Как показано в /1/, ток удержания

Откуда

где tи– продолжительность импульса;
τ - постоянная времени протекания тока;
IL = 1A – ток удержания тиристора;
R – активное сопротивление цепи тока тиристора;
U2m – амплитуда напряжения вторичной обмотки трансформатора (13);
αmax – максимальный угол регулирования пускового режима.
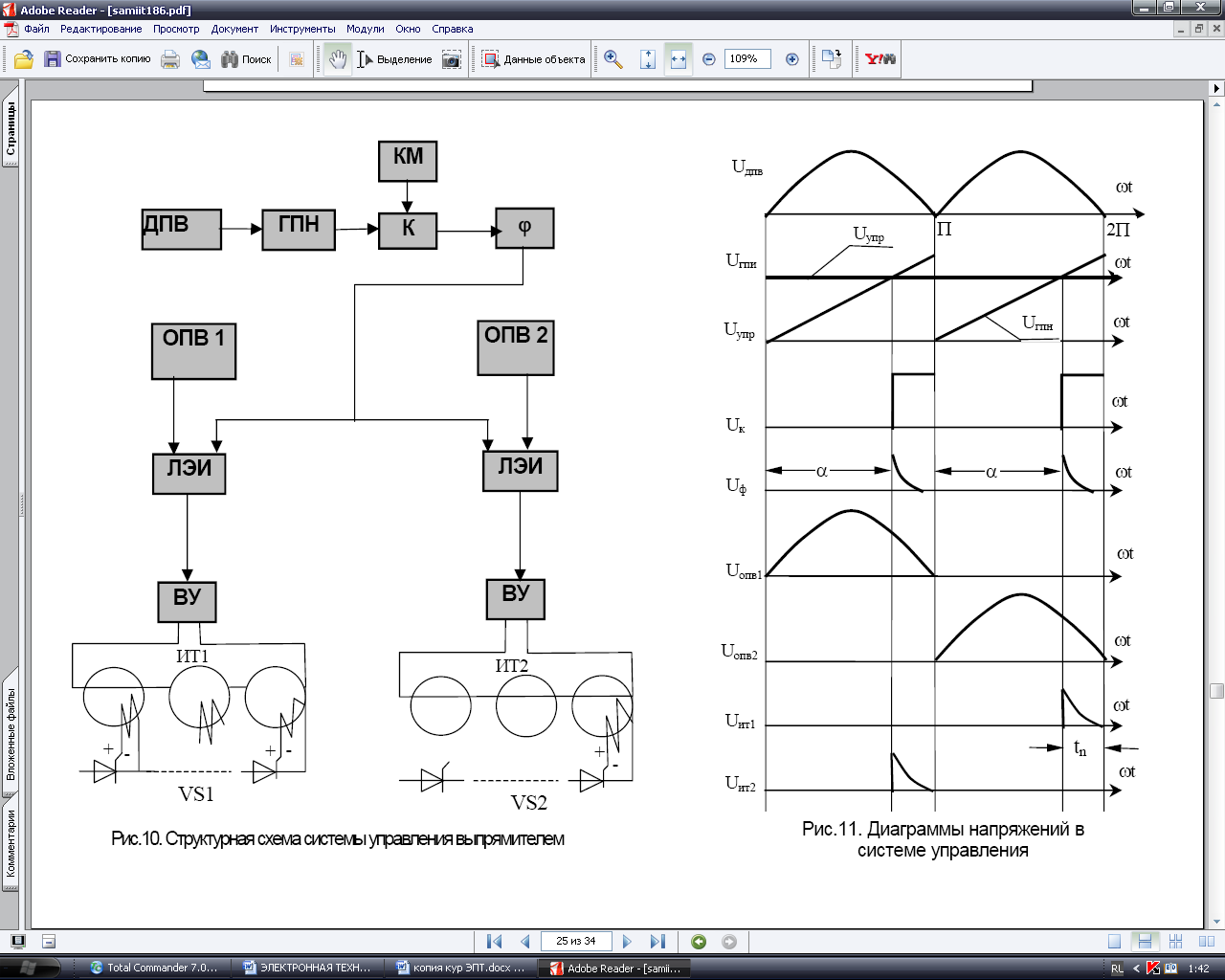
Рисунок 10 Структурная схема системы
управления выпрямителем системе управления
Рис.11. Диаграммы напряжений в системе управления
Активное сопротивление цепи R складывается из активных сопротивлений трансформатора, сглаживающего реактора и двигателя. Как показано в /1/

Индуктивность цепи тока тиристора:
L=Ld+LT, (39)
где Ld – индуктивность цепи выпрямленного тока (21);
LT – индуктивность трансформатора.
В соответствии с (2) и (7), с учетом (14):

где Uk – cм. исходные данные;
U2 – см. (14);
fc – см. исходные данные;
Idн – см. исходные данные.
Постоянную времени:
 (41)
(41)
определяют с учетом (21), (40), (39), (38).
При расчете α′max исходят из того, что этот режим характеризует выражение /1/:

Откуда
 (42)
(42)
Принимают Udmin = 0,05Udн и выражение (42) принимает вид:
 (43)
(43)
Подставляя (41), (38), (43) с учетом (14) в (38), логарифмируя правую и левую части неравенства, определяют минимальную продолжительность импульса управления tи.
6 ПОРЯДОК ВЫПОЛНЕНИЯ ПРОЕКТА И СОДЕРЖАНИЕ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
6.1 Исходные данные. Изобразить схему выпрямителя и привести исходные данные Вашего варианта.
6.2 Коммутационные процессы. Пределы изменения угла регулирования.
6.2.1 Расчетные значения углов коммутации. Используя (8) и (9), при Id = Idн и Ud = Udн, вычислить γ1и γ 2.
6.2.2 Амплитудное значение напряжения вторичной обмотки трансформатора. Здесь, используя (13) и исходные данные при Id = Idн и Ud=Udн, приняв α= γ1 и γ 2 полученные в 6.2.1 рассчитать значение U2m.
6.2.3 Действующее значение напряжения вторичной обмотки трансформатора. Используя (14), рассчитать U2.
6.2.4 Продолжительность основной коммутации. Используя (8), рассчитать γ1 для ряда Id = 0, Id =0,5 Idн , Id = Idн, Id = 1,5 Idн. Результаты расчёта свести в таблицу, где единицы измерения γ1 представить в двух вариантах: в радианах, в электрических градусах. Для лучшего восприятия зависимость γ1=f(Id) построить в электрических градусах. Аналогично выполнить следующие расчеты и графики.
6.2.5 Продолжительность фазовой коммутации. В соответствии с (9) рассчитать γ2 для ряда токов Id = 0, Id =0.5 Idн , Id = Idн, Id = 1,5Idн и ряда углов регулирования α= γ1, 30, 60, 90, 120, 150, π- γ1эл.град . Результаты расчётов свести в таблицу. Построить семейство характеристик γ2 = f(α) при различных токах Id.
6.2.6 Пределы изменения угла регулирования. В соответствии с (10), (11) и (12), рассчитать αmax при Id = 0, Id =0,5 Idн , Id = Idн, Id = 1,5Idн и ?min при тех же значениях Id. Результаты расчётов свести в таблицу. Построить зависимости αmax=f(Id), и αmin=f(Id).
6.3 Внешние и регулировочные характеристики.
6.3.1 Внешние характеристики выпрямителя. Как показано в 4.2, рассчитать Ud при 1,5Id≥ Id≥0 и αmax≥ α ≥ αmin. Результаты расчётов свести в таблицу. Построить семейство характеристик Ud = f(Id) при разных ?.
6.3.2 Регулировочные характеристики выпрямителя. Как показано в 4.2, используя результаты расчётов в 6.3.1, построить семейство характеристик Ud = f(α) при разных токах Id.
6.4. Токовые характеристики.
6.4.1 Ток в первичной обмотке трансформатора. В соответствии с 4.4 используя данные, полученные в 6.2, рассчитать I1 при 1,5Idн ≥ Idн ≥ 0,5 Idн и αmax ≥ α ≥ αmin. Построить семейство характеристик I1 =f(Id) для разных γ.
6.4.2 Ток во вторичной обмотке трансформатора. Используя данные 6.4.1. и (15), построить семейство характеристик I2 =f(Id) для разных γ.
6.4.3 Пульсация выпрямленного тока. Используя 4.4. и исходные данные, рассчитать величину двойной амплитуды пульсации выпрямленного тока id при Id = Idн . Изобразить диаграмму пульсирующего выпрямленного тока (см. рис. 7). Принять масштабы: тока id — 1 мм : 20А; времени ωt -1 мм: π/15.
6.5 Выбор вентилей для плеч выпрямителя.
6.5.1 Количество последовательно включенных вентилей в плече выпрямителя. В соответствии с 4.5 дать пример расчёта для диодов типа ДЛ161-200 I0 класса.
6.5.2 Количество параллельно включенных вентилей в плече выпрямителя. Как показано в 4.5, дать пример расчёта для тиристоров типа ТЛ171-320.
6.5.3 Экономическое обоснование выбора типа и количества вентилей в диодных и тиристорных плечах выпрямителя.
В соответствии с 6.5.1 и 6.5.2 рассчитать количество последовательно и параллельно включенных вентилей в диодных и тиристорных плечах моста, общее количество диодов и тиристоров и стоимость комплекта вентилей в каждом варианте. Результаты занести в таблицу. Сделать экономически оправданный выбор. Изобразить схемы диодного и тиристорного плеч выпрямителя в соответствии с Вашим выбором.