

3) Рабочие характеристики асинхронного двигателя
Р абочие
характеристики асинхронного двигателя
представляют собой зависимости
скольжения S,
числа оборотов ротора n2,
развиваемого момента М, потребляемого
тока I1,
расходуемой мощности Р1,
коэффициента мощности соs
j
и к. п. д. η
от
полезной мощности Р2
на валу машины. Эти характеристики
снимаются три естественных условиях
работы двигателя, т. е. двигатель
нерегулируемый, частота f1
и напряжение U1
сети остаются постоянными, а изменяется
только нагрузка на валу двигателя.
абочие
характеристики асинхронного двигателя
представляют собой зависимости
скольжения S,
числа оборотов ротора n2,
развиваемого момента М, потребляемого
тока I1,
расходуемой мощности Р1,
коэффициента мощности соs
j
и к. п. д. η
от
полезной мощности Р2
на валу машины. Эти характеристики
снимаются три естественных условиях
работы двигателя, т. е. двигатель
нерегулируемый, частота f1
и напряжение U1
сети остаются постоянными, а изменяется
только нагрузка на валу двигателя.
Рабочие характеристики асинхронного двигателя двигателя
При увеличении нагрузки на валу двигателя скольжение возрастет, причем при больших нагрузках скольжение увеличивается несколько быстрее, чем при малых.
При холостом ходе двигателя n2=n1 или S=0. При номинальной нагрузке скольжение обычно составляет S = 3-5%. Скорость вращения ротора
Так
как при увеличении нагрузки на валу
двигателя скольжение возрастает, то
число оборотов будет уменьшаться. Однако
изменение скорости вращения при
увеличении нагрузки от 0 до номинальной
очень незначительно и не превышает 5%.
Поэтому скоростная характеристика
асинхронного двигателя является жесткой
— она имеет очень малый наклон к
горизонтальной оси.

Вращающий момент, развиваемый двигателем М, уравновешен тормозным моментом на валу М2 и моментом, идущим на преодоление механических потерь М0, т. е.
где Р2 — полезная мощность двигателя, W2 — угловая скорость ротора.
При холостом ходе двигателя вращающий момент равен М0; с увеличением нагрузки на валу этот момент также увеличивается, причем за счет некоторого уменьшения скорости ротора увеличение вращающего момента происходит быстрее, чем увеличение полезной мощности на валу.
Сила тока I1 потребляемого двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе соs j мал и ток имеет большую реактивную составляющую и очень малую активную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, а потому изменение нагрузки, т. е. изменение активной составляющей тока, вызывает незначительное изменение силы тока I1 (определяющейся в основном реактивной составляющей). При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение силы тока I1..
Потребляемая двигателем мощность Р1 при графическом изображении имеет вид почти прямой линии, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с увеличением нагрузки.
Изменение коэффициента мощности при изменении нагрузки на валу двигателя происходит следующим образом. При холостом ходе соsj мал (порядка 0,2), так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу соsj возрастает (достигая наибольшего значения 0,8—0,9) в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение соsj, так как вследствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
К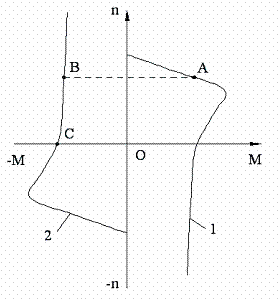 ривая
к. п. д. т имеет такой же вид, как в любой
машине или трансформаторе. При холостом
ходе к. п. д. равен нулю. С увеличением
нагрузки на валу двигателя к. п. д. резко
увеличивается, а затем уменьшается.
Наибольшего значения к. п. д. достигает
при такой нагрузке, когда потери мощности
в стали и механические потери, не
зависящие от нагрузки, равны потерям
мощности в обмотках статора и ротора,
зависящим от нагрузки. Торможение
противовключением Этот
тормозной режим возникает при реверсе
двигателя, а также широко используется
для быстрой остановки двигателя.
ривая
к. п. д. т имеет такой же вид, как в любой
машине или трансформаторе. При холостом
ходе к. п. д. равен нулю. С увеличением
нагрузки на валу двигателя к. п. д. резко
увеличивается, а затем уменьшается.
Наибольшего значения к. п. д. достигает
при такой нагрузке, когда потери мощности
в стали и механические потери, не
зависящие от нагрузки, равны потерям
мощности в обмотках статора и ротора,
зависящим от нагрузки. Торможение
противовключением Этот
тормозной режим возникает при реверсе
двигателя, а также широко используется
для быстрой остановки двигателя.
На рис. 2.27 представлены механические характеристики асинхронного двигателя при торможении противовключении для прямого (1) и обратного (2) порядка чередования фаз.
Пусть двигатель с нагрузкой на валу работал в точке А. Для торможения двигателя нужно изменить порядок чередования фаз, т.е. переключить две фазы. При этом рабочая точка перейдет в точку В (рис. 2.27). На участке ВС машина работает в режиме электромагнитного тормоза, развивая тормозной момент, под действием которого происходит быстрое снижение скорости до нуля. В точке С двигатель нужно отключить от сети, иначе произойдет реверс.
Достоинством этого тормозного режима является быстрое торможение, т.к. тормозной момент действует на всем тормозном пути. Недостатки: большие токи и потери в обмотках при торможении, необходима аппаратура, контролирующая скорость вращения и отключающая двигатель от сети при его остановке. Если в приводе механизма двигатель часто работает в режиме реверса, приходится завышать его мощность из-за больших потерь мощности.
Билет 13
1. В общем случае при несимметричной нагрузке Zab ≠ Zbc ≠ Zca. Обычно она возникает при питании от трехфазной сети однофазных приемников.
Векторная диаграмма для случая, когда в фазе ab имеется активная нагрузка, в фазе bc – активно-индуктивная, а в фазе ca – активно-емкостная приведена на рис. 3.16, топографическая диаграмма – на рис. 3.17.
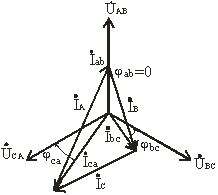
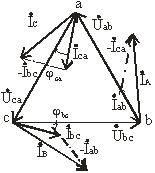
Построение векторов линейных токов произведено в соответствии с выражениями
İA = İab - İca; İB = İbc - İab; İC = İca - İbc.
Таким образом, при несимметричной нагрузке симметрия фазных токов İab, İbс, İca нарушается, поэтому линейные токи İA, İB, İC можно определить только расчетом по вышеприведенным уравнениям (3.20) или найти графическим путем из векторных диаграмм (рис. 3.16, 3.17).
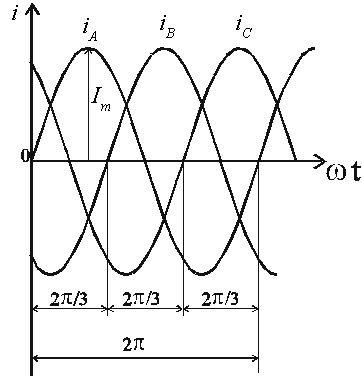
Сумма мгновенных значений токов равна нулю – доказывается с помощью временных диаграмм трехфазной системы токов (см. рис.)
|
В момент времени ωt = 0: iA = 0, iC > 0, iB < 0 , причем iC = – iB в момент ωt = 2π/12 iB = –Im, iA = iC = 0,5Im в момент ωt = 2π/6 iC = 0, iA = – iB и т.д. Во всех случаях сумма мгновенных значений токов равна нулю. |
2. Характеристика холостого хода — это зависимость ЭДС якоря Ея от тока возбуждения IВ, когда нагрузка отсутствует, а частота вращения якоря п постоянна:
Ея = f(IB) при I = 0, п = const,
где I — ток нагрузки (у генератора независимого возбуждения ток нагрузки равен току якоря).
В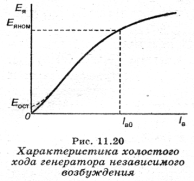 режиме холостого хода Ея
= сепФ0,
так
как результирующий поток Ф равен
основному потоку Ф0.
Учитывая, что п
= const,
получим
Ея
=
с'еФ,
режиме холостого хода Ея
= сепФ0,
так
как результирующий поток Ф равен
основному потоку Ф0.
Учитывая, что п
= const,
получим
Ея
=
с'еФ,
где с'е = сеп = const. (cе – постоянная, зависит от машины, n – число витков)
Таким образом, ЭДС якоря линейно зависит от магнитного потока Ф0, который создается током возбуждения Iв. Зависимость между потоком и током возбуждения определяется характеристикой намагничивания. Следовательно, и зависимость Ея = f(IB) также имеет вид характеристики намагничивания (рис.). Если полюсы генератора предварительно намагничены, то они сохраняют остаточную намагниченность, поэтому в машине при токе Iв = 0 имеется незначительный магнитный поток Фост, называемый остаточным магнитным потоком. По этой причине при токе Iв = 0 в обмотке вращающегося якоря индуцируется небольшая остаточная ЭДС Еост, что несколько изменяет вид характеристики в начале координат (штриховая линия на рис.). Номинальному значению ЭДС Еяном = Uном соответствует ток возбуждения Iв0.
По ХХХ определяют, как нужно изменять ток возбуждения чтобы получить необходимую ЭДС.
3. Устройство синхронных машин
|
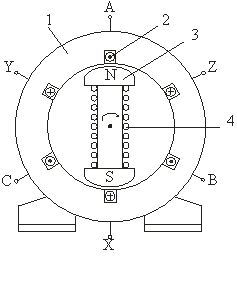
На статоре 1 генератора размещается обмотка 2, состоящая из трех частей или, как их принято называть, фаз. Обмотки фаз располагаются на статоре таким образом, чтобы их магнитные оси были сдвинуты в пространстве относительно друг друга на угол 2π/3, т.е. на 120°. На рис. 3.1 каждая фаза обмотки статора условно показана состоящей из одного витка. Начала фаз обозначены буквами A, B и C, а концы – X, Y, Z. Ротор 3 представляет собой электромагнит, возбуждаемый постоянным током обмотки возбуждения 4, расположенной на роторе.
|
Статор синхронных машин имеет такое же устройство, как и статор асинхронной машины. Трехфазную обмотку, размещенную в пазах сердечника статора, выполняют с таким же числом полюсов, как и ротор. В синхронных машинах обмотку статора принято называть обмоткой якоря, а сердечник статора вместе с обмоткой — якорем. Однако статор синхронных машин имеет и некоторые конструктивные особенности, обусловленные необходимостью его интенсивного охлаждения, так как в крупных синхронных машинах мощность потерь энергии, преобразующейся в тепловую, очень велика. В крупных машинах в системах охлаждения в качестве хладагентов используют водород, трансформаторное масло и дистиллированную воду. В машинах относительно небольшой мощности используют также и воздушное принудительное охлаждение.
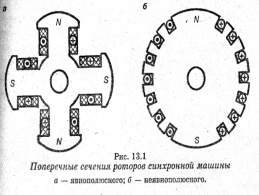
Ротор синхронных машин конструктивно выполняют либо явнополюсным (с явно выраженными полюсами), либо неявнополюсным (с неявно выраженными полюсами), поперечные сечения которых показаны на рис. 13.1. На роторе располагают обмотку возбуждения. Ее подключают к источнику постоянного напряжения, называемого возбудителем. Таким образом, ротор синхронной машины имеет свой магнитный поток, который определяет полярность его полюсов. В этом заключается принципиальное конструктивное отличие ротора синхронной машины от ротора асинхронной машины, полярность полюсов которого всегда определяется полярностью полюсов статора.
Неявнополюсный ротор, как правило, изготовляют как единое целое из стальной поковки, используя для этого особо прочную сталь, обладающую высокими магнитными и механическими свойствами. Обмотку возбуждения закладывают в пазы, выфрезерованные на наружной поверхности ротора, и она создает магнитное поле с двумя или четырьмя полюсами, если ее подключить к источнику постоянного напряжения. Такой ротор применяют в синхронных машинах при частотах вращения вала 3000 об/мин и 1500 об/мин (в турбогенераторах и синхронных двигателях). Общий вид неявнополюсного ротора турбогенератора показан на рис. 13.2а.
Явнсполюсный ротор применяют в гидрогенераторах, синхронных двигателях и компенсаторах, в которых частота вращения, как правило, не превышает 1000 об/мин. Внешний вид роторов таких машин показан на рис. 13.2б, в. Сердечники полюсов изготовляют из листовой электротехнической стали. Число полюсов, которых размещают обмотку возбуждения, может быть достаточно большим, особенно в гидрогенераторах. Это связано с тем, что гидравлические турбины — тихоходные машины, и чтобы получить промышленную частоту напряжения f = рп/60 = 50 Гц при малой частоте вращения п, необходимо иметь большое число пар полюсов р. Так, например, гидрогенераторы, установленные на Саяно-Шушенской ГЭС, имеют частоту вращения п = 142,8 об/мин и число пар полюсов р = 21. По этой причине наружный диаметр ротора мощных гидрогенераторов может достигать 16 м при длине 1,75 м. С целью снижения механической нагрузки на вал в мощных гидрогенераторах вал ротора располагают вертикально. Внешний вид гидрогенератора с таким конструктивным исполнением показан на рис. 13.3.
Синхронные двигатели изготовляют, как правило, с горизонтальным расположением вала. При частоте вращения 3000 об/мин они имеют ротор с неявно выраженными полюсами, а при частоте вращения от 100 до 1000 об/мин — с явно выраженными полюсами. В машинах небольшой мощности такое исполнение ротора иногда применяют и при частотах вращения 1500 об/мин. В явнополюсных двигателях в полюсные наконечники укладывают короткозамкнутую обмотку, называемую пусковой, аналогичную короткозамкнутой обмотке ротора в асинхронных машинах (рис. 13.4). Она предназначена для осуществления асинхронного пуска синхронных двигателей и повышения устойчивости работы двигателя.
Синхронные компенсаторы выполняют только в явнополюсном исполнении с горизонтальным расположением вала.
Билет №10.
1) В последовательном RLC-контуре резонанс наступает на частоте W0=1/(LC). Изменится ли частота, если на зажимы конденсатора подключить активное сопротивление R?
Резонанс – явление в электрической цепи (или на ее участке), содержащей индуктивные и емкостные элементы (хотя бы по одному), возникающее в случае, когда реактивное сопротивление или реактивная проводимость этой цепи (или ее участка) равны нулю.
Такой режим цепи при последовательном соединении элементов с R,L,C, когда XL= XC, а напряжения на индуктивном UL и емкостном UC элементах, находящиеся в противофазе, равны по значению и могут превышать напряжение всей цепи, носит название резонанса напряжений.
При этом режиме R=Const, поэтому при заданном условии частота не изменится.
2) Конструктивные элементы и узлы машины постоянного тока. Можно ли для облегчения конструкцию станины выполнить из алюминия?
1 – станина 2 - обмотки главных полюсов 3
- полюсные наконечники 4 – щётки 5 –
дополнительные полюса6 – коллектор7 –
выводные клеммы якоря8 – якорь9 – рым
– станина 2 - обмотки главных полюсов 3
- полюсные наконечники 4 – щётки 5 –
дополнительные полюса6 – коллектор7 –
выводные клеммы якоря8 – якорь9 – рым
Машина постоянного тока состоит из 2 основных частей: 1 – неподвижная часть (станина) и 8 – вращающаяся часть (якорь).
Материалом для изготовления статора (станины) служит литая электротехническая сталь с высокой магнитной проницаемостью. Статор служит для крепления к нему отдельных деталей машины, таких как главные и добавочные полюсы, подшипниковые щиты, щёточное устройство, а также для защиты отдельных узлов машины от механических повреждений, и является частью магнитопровода, по которой замыкается основной магнитный поток, создаваемый главными полюсами. Для облегчения нельзя выполнять из алюминия.
Главный полюс состоит из сердечника с полюсным наконечником и катушек возбуждения, причем на сердечнике могут располагаться несколько катушек возбуждения. Сердечник главного полюса набирают из листов электротехнической стали.
Основными частями якоря являются его сердечник с обмоткой и коллектор, насаженные на вал машины. Сердечник якоря набирают из изолированных листов электротехнической стали.
Коллектор является неотъемлемой частью якоря и представляет собой цилиндрическое тело, набранное из медных клинообразных коллекторных пластин, изолированных друг от друга миканитовыми прокладками.
Щёточное устройство предназначено для осуществления электрического скользящего контакта между вращающимся якорем и внешней электрической цепью. Основными элементами этого устройства являются токопроводящие щётки. Материалом для щёток служит композиция, выполненная на основе графита.
3) Реостатное регулирование частоты вращения асинхронного двигателя. Как изменятся при этом механические характеристики? Достоинства и недостатки метода.
Этот способ регулирования частоты вращения применим только для двигателей с фазным ротором. Регулировочные реостаты включают последовательно с фазными обмотками ротора, т.е. аналогично пусковым реостатам.
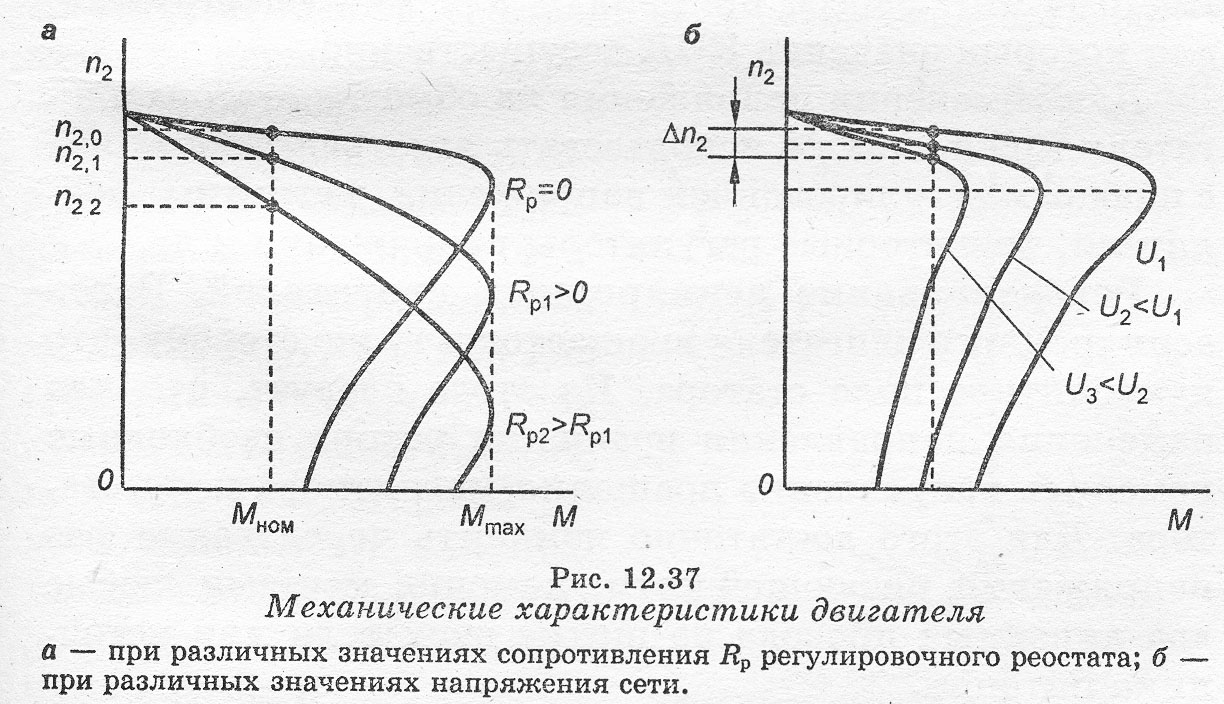

В отличие от пусковых регулировочные реостаты рассчитаны на длительный режим работы. При постоянном тормозном моменте на валу двигателя, а следовательно, при постоянном вращающем моменте изменение сопротивления регулировочного реостата приводит к изменению частоты вращения двигателя.
Каждому значению сопротивления Rp соответствует своя механическая характеристика. При M=Const частота вращения двигателя тем меньше, чем больше сопротивление регулировочного реостата. Если Rp=0, то двигатель имеет частоту вращения n2,0, близкую к синхронной частоте n1. Если Rp1>0, то n2,1 < n2,0 итд.
Т.о., регулирование частоты вращения возможно только в сторону ее уменьшения по отношению к синхронной частоте.
Рассматриваемый способ регулирования связан со значительными потерями энергии в регулировочных реостатах и поэтому малоэкономичен. Он применяется главным образом при кратковременной или повторно-кратковременной работе (например, пуско-наладочные работы), а также в приводах с вентиляторным моментом.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Билет 7
1) В чем сущность комплексного метода расчета? Запишите в комплексной форме сопротивление и проводимости активного сопротивления R, катушки индуктивности L, емкости С.
Комплексный метод расчета электрических цепей синусоидального тока применим только при установившихся режимах работы цепей и основан на использовании преобразований:

Сущность его заключается в том, что, используя указанные преобразования, систему дифференциальных уравнений для действительных функций времени можно заменить системой алгебраических уравнений с комплексными токами, напряжениями и ЭДС. Переход от дифференциальных уравнений к алгебраическим уравнениям с комплексными числами осуществляют заменой в них мгновенных значений тока i, напряжения u и ЭДС е комплексными числами в соответствии с:
 ,
,
а
производных и интегралов от них –
комплексными числами в соответствии
с: .
.
Замена синусоидальных токов, напряжений и ЭДС соответствующими им комплексными числами позволяет существенно упростить математический анализ процессов в электрических цепях и электротехнических устройствах переменного тока в установившихся режимах.
Комплексное сопротивление ветви – частное от деления комплексного напряжения на концах ветви на комплексную величину протекающего по ней тока:
 .Комплексная
проводимость:
.Комплексная
проводимость: Сопротивления:
Сопротивления:
2) Автотрансформаторы, их достоинства и недостатки. Области применения. Измерительные трансформаторы тока и напряжения. Отличительные их особенности работы.
Автотрансформаторы применяют для преобразования напряжения при передаче электрической энергии. Они отличаются от трансформаторов тем, что у них обмотка НН является частью обмотки ВН. Первичная и вторичная обмотки имеют как магнитную, так и электрическую связь.
Бывают однофазные и трехфазные, повышающие и понижающие.
Потери мощности в стали магнитопровода автотрансформатора такие же, как и у трансформатора. Потери на нагрев обмоток у автотрансформатора меньше, так как обмотка только одна и при этом ток в общих витках мал. Поэтому КПД автотрансформаторов больше, чем обычных трансформаторов.
Недостатки: более тяжелые условия КЗ, так как сопротивление автотрансформаторов меньше, а ток КЗ больше, чем у трансформатора, а также возможность попадания высокого напряжения в сеть низшего напряжения при межвитковом КЗ внутри автотрансформатора.
Т рехфазные
автотрансформаторы применяют для связи
энергосистем, уровни напряжения которых
мало отличаются друг от друга (110, 220,
330, 500 кВ). Автотрансформаторы используют
также для пуска асинхронных и синхронных
электродвигателей. Однофазные
автотрансформаторы малой мощности
нашли широкое применение в устройствах
связи и автоматики. В лабораторной
практике автотрансформаторы часто
применяют для плавного изменения
напряжения в широких пределах.
рехфазные
автотрансформаторы применяют для связи
энергосистем, уровни напряжения которых
мало отличаются друг от друга (110, 220,
330, 500 кВ). Автотрансформаторы используют
также для пуска асинхронных и синхронных
электродвигателей. Однофазные
автотрансформаторы малой мощности
нашли широкое применение в устройствах
связи и автоматики. В лабораторной
практике автотрансформаторы часто
применяют для плавного изменения
напряжения в широких пределах.
Измерительные трансформаторы тока и напряжения.
В электроустановках переменного тока большой мощности и напряжением выше 1 кВ непосредственное включение электроизмерительных приборов невозможно, так как номинальные значения напряжения и тока приборов не соответствуют номинальным значениям напряжения и тока электроустановок. Для расширения пределов измерения приборов и для изоляции их от цепей высокого напряжения применяют ИТТ и ИТН.
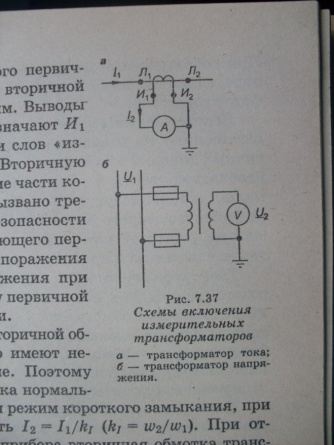
ИТТ используют для расширения пределов измерения амперметров и последовательных обмоток ваттметров, счетчиков энергии и фазометров. Его первичную обмотку включают последовательно в ту цепь, ток в которой надо измерить. Эта обмотка обычно состоит из одного или нескольких витков, ее выводы обозначают Л1 и Л2. К зажимам вторичной обмотки подключают амперметр или последовательные обмотки ваттметра, счетчика и фазометра. Чтобы ток во вторичной обмотке был меньше измеряемого первичного тока, число витков вторичной обмотки делают большим. Выводы вторичной обмотки обозначают И1 и И2. Вторичную обмотку и металлические части кожуха заземляют. Это вызвано требованиями техники безопасности для защиты обслуживающего персонала от возможного поражения током высокого напряжения при пробое изоляции между первичной и вторичной обмотками.
П
 одключаемые
ко вторичной обмотке приборы обычно
имеют небольшое сопротивление. Поэтому
для трансформатора тока нормальным
режимом является режим короткого
замыкания, при котором можно считать
I2=I1/k1
(k1=w2/w1).
При
отключении или замене прибора вторичная
обмотка трансформатора тока должна
быть обязательно закорочена. Для
трансформаторов тока, как и для силовых
трансформаторов, справедливо уравнение
МДС
одключаемые
ко вторичной обмотке приборы обычно
имеют небольшое сопротивление. Поэтому
для трансформатора тока нормальным
режимом является режим короткого
замыкания, при котором можно считать
I2=I1/k1
(k1=w2/w1).
При
отключении или замене прибора вторичная
обмотка трансформатора тока должна
быть обязательно закорочена. Для
трансформаторов тока, как и для силовых
трансформаторов, справедливо уравнение
МДС
 .
В отличие от силовых трансформаторов,
у трансформаторов тока МДС первичной
обмотки
.
В отличие от силовых трансформаторов,
у трансформаторов тока МДС первичной
обмотки
 не
зависит от МДС вторичной обмотки
не
зависит от МДС вторичной обмотки
 ,
а определяется током в цепи, в которую
она включена. Если разомкнуть цепь
вторичной обмотки, то
,
а определяется током в цепи, в которую
она включена. Если разомкнуть цепь
вторичной обмотки, то
 и результирующая МДС будет равна
которая
во много раз может превышать МДС
и результирующая МДС будет равна
которая
во много раз может превышать МДС
 .
Поэтому если не замкнуты накоротко
зажимы вторичной цепи, то МДС первичной
обмотки
не
будет скомпенсирована, магнитный поток
и потери в магнитопроводе увеличатся
настолько, что трансформатор может
сгореть. Кроме того, возросший магнитный
поток индуцирует на зажимах вторичной
обмотки, имеющей большое число витков,
значительную ЭДС (сотни и даже тысячи
вольт).
.
Поэтому если не замкнуты накоротко
зажимы вторичной цепи, то МДС первичной
обмотки
не
будет скомпенсирована, магнитный поток
и потери в магнитопроводе увеличатся
настолько, что трансформатор может
сгореть. Кроме того, возросший магнитный
поток индуцирует на зажимах вторичной
обмотки, имеющей большое число витков,
значительную ЭДС (сотни и даже тысячи
вольт).
Трансформаторы тока имеют стандартные номинальные первичные токи от 5 до 15000 А при номинальном вторичном токе 5 А (у некоторых трансформаторов при токе 1 А). Поэтому ко вторичной обмотке следует присоединять приборы, номинальный ток которых равен 5 А. При соблюдении этого условия цену деления прибора определяют по номинальному первичному току трансформатора тока.
Некоторые типы лабораторных трансформаторов тока изготовляют на несколько значений номинальных первичных токов, в том числе и на токи, меньшие 5 А. Это необходимо тогда, когда измеряемые токи настолько малы, что не могут быть измерены прибором, предел измерения которого равен 5 А. В этом случае трансформаторы работают как повышающие, т. е. измеряемый ток увеличивается с их помощью.
ИТН применяют в сетях высокого напряжения для измерения напряжения и частоты. К вторичной обмотке подключают вольтметры, частотомеры и параллельные обмотки ваттметров, счетчиков и фазометров, т. е. обмотки, имеющие большое сопротивление. Поэтому для трансформаторов напряжения нормальным режимом является режим холостого хода.
Трансформаторы напряжения конструктивно мало отличаются от обычных силовых трансформаторов. Они имеют небольшую мощность и включаются в сеть так же, как обычные трансформаторы. Вторичная обмотка заземлена. Коэффициент трансформации выбирают таким, чтобы вторичное напряжение было равно 100 В.
При включении через измерительные трансформаторы измерительных приборов, у которых различаются начала и концы обмоток, нужно следить, чтобы начала обмоток приборов (генераторные зажимы) были присоединены к зажиму И1 трансформатора тока и зажиму а трансформатора напряжения. Тогда направление тока в обмотках приборов будет таким, как при прямом включении приборов, и показание приборов будет правильным.
3) Пуск АД с контактными кольцами. Пусковые механические характеристики. Влияние величины сопротивления на пусковой ток и момент.
Пуск
двигателей с контактными кольцами
(фазным ротором) осуществляется с помощью
пускового реостата. Трехфазный пусковой
реостат включают последовательно с
обмоткой ротора через щетки и кольца.
В результате сопротивление цепи ротора
увеличивается, а пусковой ток ротора
 уменьшается и, следовательно, уменьшается
пусковой ток двигателя.
уменьшается и, следовательно, уменьшается
пусковой ток двигателя.
С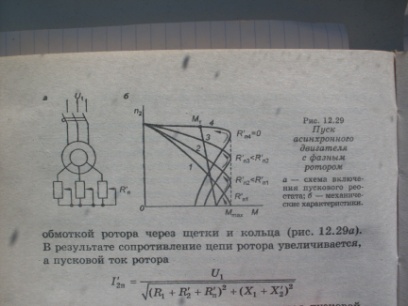 опротивление
пускового реостата
опротивление
пускового реостата
 можно
подобрать таким, что пусковой момент
будет равен максимальному. Для этого
необходимо, чтобы Sкр=1.
Получаем:
можно
подобрать таким, что пусковой момент
будет равен максимальному. Для этого
необходимо, чтобы Sкр=1.
Получаем:
 ,
откуда сопротивление пускового реостата,
приведенное к обмотке статора:
,
откуда сопротивление пускового реостата,
приведенное к обмотке статора:
 .
.
При
включении пускового реостата сопротивлением
 двигатель трогается с места при Мп=Мmax
(характеристика 1). По мере того, как
увеличивается частота вращения двигателя,
сопротивление пускового реостата
уменьшают. Этому соответствует переход
на новую механическую характеристику
(2). Когда пусковой реостат полностью
выведен, разгон двигателя заканчивается
в соответствии с естественной
характеристикой 4. Такое изменение
сопротивления пускового реостата
обеспечивает условия разгона двигателя
при моментах, близких к максимальному,
благодаря чему сокращается время пуска.
Это особенно важно, когда пуск двигателя
осуществляется под нагрузкой.
двигатель трогается с места при Мп=Мmax
(характеристика 1). По мере того, как
увеличивается частота вращения двигателя,
сопротивление пускового реостата
уменьшают. Этому соответствует переход
на новую механическую характеристику
(2). Когда пусковой реостат полностью
выведен, разгон двигателя заканчивается
в соответствии с естественной
характеристикой 4. Такое изменение
сопротивления пускового реостата
обеспечивает условия разгона двигателя
при моментах, близких к максимальному,
благодаря чему сокращается время пуска.
Это особенно важно, когда пуск двигателя
осуществляется под нагрузкой.
АД с фазным ротором сложнее по конструкции и дороже АД с короткозамкнутым ротором. Но в связи с тем, что при пуске они могут развивать максимальный момент, их применяют в установках с тяжелыми условиями пуска (подъемные краны, лебедки и др.).
Билет 15
1) Коэффициент мощности симметричных трехфазных установок, его технико-экономическое значение и способы повышения.
Значительную часть приемников электрической энергии составляют трехфазные асинхронные двигатели, обслуживающие силовые промышленные установки (компрессоры, насосы, вентиляторы) и производственные механизмы (в основном станки), установки электрического освещения, электрические печи, а также преобразовательные агрегаты, служащие для питания приемников постоянного тока. Все эти приемники, кроме установок электрического освещения, как правило, являются симметричными.
Большая часть промышленных приемников потребляет из сети, помимо активной, и реактивную энергию. Основными потребителями реактивной энергии являются асинхронные двигатели и трансформаторы, потребляющие соответственно 60÷65 и 20÷25% общего количества реактивной энергии.
При загрузке линий передач и трансформаторов значительными потоками реактивной энергии возникают дополнительные потери на нагрев, потери напряжения (особенно в сетях районного значения), уменьшается пропускная способность линий электропередачи и трансформаторов, возникает необходимость увеличения площадей сечений проводов воздушных и кабельных линий, а также мощности или количества трансформаторов. Поэтому в современных системах электроснабжения стремятся частично разгружать линии электропередачи и трансформаторы от реактивной энергии, приближая в соответствии с технико-экономическими возможностями источники реактивной энергии к местам ее потребления. Это приводит к увеличению коэффициента мощности установок.
Повышение коэффициента мощности имеет огромное технико-экономическое значение: так, его повышение на 0,01 только в одной крупной энергосистеме дает ежегодно экономию нескольких миллионов киловатт-часов.
Повышение коэффициента мощности промышленных предприятий должно осуществляться, прежде всего, за счет упорядочения энергетического режима оборудования, рационального использования установленных мощностей асинхронных двигателей и трансформаторов, замены мало загруженных двигателей двигателями меньших мощностей, ограничения режимов холостого хода трансформаторов и двигателей и др. В случае необходимости прибегают к искусственным мерам повышения коэффициента мощности с помощью компенсирующих устройств (источников реактивной энергии) — синхронных компенсаторов — (мощных синхронных двигателей) и статических конденсаторов.
Чем больше реактивная энергия, вырабатываемая компенсирующими устройствами, установленными вблизи приемников, тем выше коэффициент мощности.
Выбор компенсирующих устройств осуществляют на основе технико-экономических расчетов. Применение синхронных компенсаторов в маломощных установках нецелесообразно, поэтому на промышленных предприятиях при мощности компенсирующего устройства меньше 5 МВАр (U = 6 кВ) и 10 МВАр (U = 10 кВ) экономически целесообразна установка конденсаторных батарей.
Реактивная мощность конденсаторов в одном элементе составляет 4÷10 кВАр: из двух элементов собирают батареи требуемой мощности, соединяют их треугольником и включают в трехфазную сеть. В этом случае при заданном напряжении требуются конденсаторы меньше емкости. Установки конденсаторов делятся на три вида: индивидуальные, групповые и централизованные (в последних мощность конденсаторов используется более эффективно).
В![]() соответствии с указаниями по компенсации
реактивной мощности в распределительных
сетях каждому предприятию нормируется
не коэффициент мощности, а непосредственное
экономически обоснованное значение
реактивной энергии, которую ему
разрешается потреблять из сети. В
соответствии со специальными договорами
предприятиям устанавливается оптимальный
tgj,
определяемый по показаниям счетчиков
реактивной и активной энергии (tgj
= Qср/Pср).
Если предприятие работает с tgj,
близким к оптимальному, то оно получает
скидку на оплату за электроэнергию (что
дает общую экономию средств), если tgj
отличается от оптимального, то
устанавливается надбавка к тарифу (до
30 %).
соответствии с указаниями по компенсации
реактивной мощности в распределительных
сетях каждому предприятию нормируется
не коэффициент мощности, а непосредственное
экономически обоснованное значение
реактивной энергии, которую ему
разрешается потреблять из сети. В
соответствии со специальными договорами
предприятиям устанавливается оптимальный
tgj,
определяемый по показаниям счетчиков
реактивной и активной энергии (tgj
= Qср/Pср).
Если предприятие работает с tgj,
близким к оптимальному, то оно получает
скидку на оплату за электроэнергию (что
дает общую экономию средств), если tgj
отличается от оптимального, то
устанавливается надбавка к тарифу (до
30 %).
Коэффициентом мощности называется отношение активной мощности (ватт, киловатт) к полной мощности (вольт-ампер, киловольт-ампер). Коэффициент мощности в общем случае меньше единицы. Только при чисто активной нагрузке (освещение, нагревательные устройства) он равен единице.
где QC — реактивная мощность компенсирующих устройств.
Величина коэффициента мощности определяет ту долю полной мощности генератора или трансформатора, которую он может отдать энергоприемнику в виде активной мощности.
Низкий соs j у потребителя обусловливает увеличение полной мощности генераторов и трансформаторов, создает недогрузку соответствующих первичных двигателей, а также увеличивает потери мощности в проводах и их сечение.
Причинами низкого коэффициента мощности могут быть:
1.Недогрузка асинхронных электродвигателей на промышленных предприятиях. При холостом ходе двигателя соs j равен 0,1—0,3; при номинальной нагрузке — 0,83—0,85 и выше.
2.Неправильный выбор типа электродвигателя, например необоснованное применение закрытого электродвигателя вместо открытого.
3.Увеличение напряжения в сети выше номинального.
4.Некачественный ремонт электродвигателей (неполное заполнение пазов, сильный износ подшипников, увеличение воздушного зазора или неравномерности его по периметру и т. п.).
Снижение коэффициента мощности наносит государству значительный ущерб. Поэтому повышение коэффициента мощности электрических установок является важнейшей народнохозяйственной задачей.
Практика указывает на следующие способы увеличения соs j:
- правильный выбор типа, мощности и числа оборотов установленных электродвигателей (и особенно вновь устанавливаемых);- полная загрузка электродвигателей по номинальным значениям тока и напряжения;
- запрещение работы асинхронных электродвигателей продолжительное время вхолостую; - правильный и качественный ремонт электродвигателей;- применение статических конденсаторов;
- замена части асинхронных электродвигателей синхронными; - при нагрузке двигателя менее чем на 40—50% целесообразно переключить его с треугольника на звезду (если он нормально работает при включении обмоток треугольником).
2) Классификация двигателей постоянного тока по способу возбуждения. Достоинства и недостатки каждого способа. Области применения двигателей с различными способами возбуждения.
Электрические двигатели постоянного тока (ДПТ) – машины, преобразующие электрическую энергию постоянного тока в механическую энергию. Эта механическая энергия используется для приведения во вращение какого-либо исполнительного механизма.
ДПТ по способу возбуждения делятся на:- ДПТ параллельного возбуждения;- ДПТ последовательного возбуждения;- ДПТ смешанного возбуждения.Двигатель параллельного возбуждения.
В двигателе параллельного возбуждения обмотка возбуждения включена на напряжение сети, т.е. параллельно обмотке якоря. Ток возбуждения составляет 3-5% от номинального значения тока двигателя. После пуска двигателя пусковой реостат полностью выведен, и к якорю двигателя подводится напряжение сети.
Характерной особенностью таких двигателей является независимость тока возбуждения (или потока возбуждения) от тока якоря машины. Разновидностью независимого возбуждения является возбуждение от постоянных магнитов.
Достоинства:- большой диапазон скоростей;- удобно и экономично регулировать величины тока возбуждения.Недостатки:- сложность конструкции;- наличие скользящего контакта в коллекторе;- необходим источник постоянного тока.
Применение: в приводах вентиляторов, станков, а также в других случаях регулируемого электропривода, где требуется устойчивая работа при колебаниях нагрузки, так как они имеют жесткие механические характеристики и возможность плавного регулирования частоты вращения в широком диапазоне.Двигатель последовательного возбуждения.
Обмотка возбуждения включена последовательно с обмоткой якоря, поэтому ток возбуждения равен току якоря.
Режим холостого хода недопустим, т.к. при токе якоря, близком к нулю, ток возбуждения и магнитный поток также близки к нулю, частота вращения двигателя увеличивается в несколько раз по сравнению с номинальной, что может привести к механическому разрушению якоря.
Способность двигателей последовательного возбуждения развивать большой электромагнитный момент, пропорциональный квадрату тока якоря, обеспечивает этим двигателям хорошие пусковые свойства, т. е. большой пусковой момент при сравнительно малом токе якоря. Поэтому такие двигатели применяют в грузоподъёмных и тяговых приводах.
Двигатели последовательного возбуждения не создают таких больших толчков тока для питающей сети при резких увеличениях тормозного момента, какие создают двигатели параллельного возбуждения.
Двигатель смешанного возбуждения.Имеет две обмотки возбуждения, одна из которых включена параллельно обмотке якоря, а другая - последовательно с ней.
Достоинство двигателя со смешанным возбуждением является то, что он обладает мягкой механической характеристикой, но может работать и в режиме холостого хода.
Д![]() вигатели
смешанного возбуждения применяются в
условиях, когда требуется большой
пусковой момент, быстрое ускорение при
пуске и допустимы значительные изменения
скорости вращения при изменении нагрузки.
Эти двигатели используются также в
случаях, когда момент нагрузки изменяется
в широких пределах, так как при этом
мощность двигателя снижается, как и у
двигателя с последовательным возбуждением.
В связи с этим двигатели смешанного
возбуждения применяются для привода
на постоянном токе компрессоров,
строгальных станков, печатных машин,
прокатных станов, подъемников и т. д. В
последнее время двигатели смешанного
возбуждения используются также для
электрической тяги, так как при этом
легче, чем в случае применения двигателей
последовательного возбуждения,
осуществляется торможение подвижных
составов с возвращением энергии в
контактную сеть постоянного тока путем
перевода машины в генераторный режим
работы.
вигатели
смешанного возбуждения применяются в
условиях, когда требуется большой
пусковой момент, быстрое ускорение при
пуске и допустимы значительные изменения
скорости вращения при изменении нагрузки.
Эти двигатели используются также в
случаях, когда момент нагрузки изменяется
в широких пределах, так как при этом
мощность двигателя снижается, как и у
двигателя с последовательным возбуждением.
В связи с этим двигатели смешанного
возбуждения применяются для привода
на постоянном токе компрессоров,
строгальных станков, печатных машин,
прокатных станов, подъемников и т. д. В
последнее время двигатели смешанного
возбуждения используются также для
электрической тяги, так как при этом
легче, чем в случае применения двигателей
последовательного возбуждения,
осуществляется торможение подвижных
составов с возвращением энергии в
контактную сеть постоянного тока путем
перевода машины в генераторный режим
работы.
3) Проанализируйте влияние реакции якоря на величину напряжения синхронного генератора (СГ) при неизменных ЭДС и тока статора при емкостной нагрузке. Изобразите соответствующую векторную диаграмму.
Результирующий магнитный поток зависит от характера нагрузки синхронной машины, т.е. от сдвига фаз между ЭДС и током статора. Влияние магнитного потока якоря на результирующий магнитный поток называют реакцией якоря.
При емкостной нагрузке ток противоположен по фазе индуктивному току (ψ = - π/2) и создает магнитный поток якоря, который совпадает по направлению с основным магнитным потоком. Следовательно, он является продольным намагничивающим потоком Фяd. Как видно из векторной диаграммы, в этом случае результирующие магнитный поток Ф и ЭДС Е увеличиваются за счет реакции якоря.
Билет 14