

Регулятор Уатта
Відцентровий регулятор, механізм для автоматичної підтримки заданої частоти обертання вала регульованого об'єкта (двигуна, турбіни і т.п.) з датчиком у виді обертових вантажів. Відцентрова сила вантажів використовується для переміщення органа, що керує об'єктом. У сучасних регуляторах маються один, два чи більш обертові вантажі (мал. 1).
-
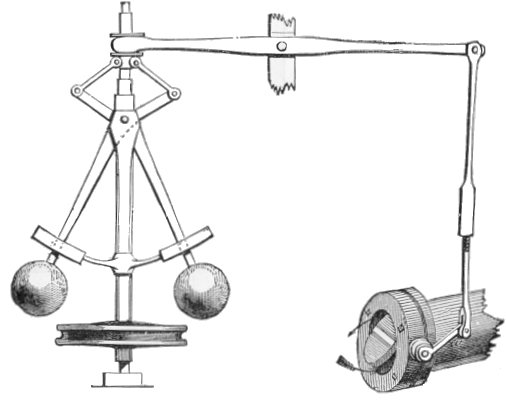
Вал
Груз
Муфта
Пружина
Керуючий орган
При зміні частоти обертання вала відцентрова сила вантажів змінюється, що приводить до переміщення муфти і зв'язаного з нею регулюючого органа. При відновленні заданого значення частоти обертання муфта повертається у вихідне положення за допомогою пружин. У залежності від призначення можуть бути прямої і непрямої дії. У регуляторах прямої дії переміщення муфти приводить до переміщення органа, що керує регульованим об'єктом.
При зміні частоти обертання вала відцентрова сила вантажів змінюється, що приводить до переміщення муфти і зв'язаного з нею регулюючого органа. При відновленні заданого значення частоти обертання муфта повертається у вихідне положення за допомогою пружин. У залежності від призначення можуть бути прямої і непрямої дії. У регуляторах прямої дії переміщення муфти приводить до переміщення органа, що керує регульованим об'єктом. Якщо зусилля, необхідне для цього переміщення, виявляється значним, застосовуються регуляторах непрямої дії.
15. Поняття про регулятори напруги температури, потужності, автоматичні системи орієнтації, слідкуючі системи. Загальна модель сау.
Розрізняють три типи терморегуляторів:
механічний;
електронний;
програмований.
Механічний терморегулятор найпростіший і недорогий прилад. Принцип роботи заснований на розмиканні біметалічної пластини з контактами. Не оснащується датчиком підлоги.
Електронний прилад точніший, і складний. Працює на напівпровідникових схемах. Бувають варіанти, як з датчиком підлоги так і без нього.
Програмований, електронний терморегулятор, найдорожчий, і складний прилад, з різного роду програмованими функціями, такими як: час роботи, температура в різний час роботи, програма роботи на строк до 7 днів.
16. Поняття стаціонарності, ординарності, незалежності наслідків вхідного потоку.
Потік вимог називається стаціонарним, якщо ймовірність того, що за певний проміжок часу (t,t +a) у систему надійде k (певну кількість) вимог, одне й теж для всіх проміжків довжиною a, розташованих на будь-якій ділянці осі 0t. При стаціонарному потоці середнє число вступників в одиницю часу вимог повинне бути постійною величиною.
Потік називається з відсутністю післядії, якщо протікання процесу, у якому-небудь проміжку часу, не залежить від протікання процесу в будь-якому іншому проміжку часу, і ці проміжки не перекриваються. Умова відсутності післядії означає, що кожна вимога надходить у систему незалежно друг від друга.
Потік називається ординарним, якщо ймовірність сполучення двох і більше вимог у той самий момент часу зневажливо мала, тобто практично в кожен момент часу може надійти лише одна вимога.
18. Найпростіший вхідний потік та його математична модель.
Потік вимог називається найпростішим, якщо він володіє трьома властивостями: стаціонарності, ординарності й відсутності післядії.
При найпростішому потоці вимог розподіл вимог, що надходять у систему підкоряються закону розподілу Пуассона.
21. Лінеаризація диференціальних моделей
Лінеаризація – це процес переходу від нелінійних диференціальних рівнянь до лінійних. Математичною основою лінеаризації є розклад нелінійної функції в ряд Тейлора. Математичною основою лінеаризації є розклад нелінійної функції в ряд Тейлора, в якому залишаються тільки перші члени розкладу.
26. Параметри λ і μ вхідного потоку, їх взаємозв'язок та інтерпретація.
λ-інтенсивність вхідного потоку;
μ - інтенсивність обслуговування вихідного потоку.
31. Ортогональна та ортонормована системи функцій, їх роль в ТАУ. Приклад ортогонального базису на відрізку [0,T].
Послідовність функцій неперервних на відрізку [a, b], називається ортогональної системою функції на відрізку [a, b], якщо всі функції послідовності попарно ортогональні на цьому відрізку, тобто якщо
![]()
Система називається ортогональною та нормованої (ортонормірованою) на відрізку [a, b], якщо виконується умова
![]()
Нехай тепер f (x) - будь-яка функція безперервна на відрізку [a, b]. Рядом Фур'є такої функції f (x) на відрізку [a, b] за ортогональної системи називається ряд:
![]()
коефіцієнти якого визначаються рівністю:
 n
= 1,2, ...
n
= 1,2, ...
Якщо ортогональна система функцій на відрізку [a, b] ортонормірованная, то в цьому випадку
![]() де
n = 1,2, ...
де
n = 1,2, ...
Нехай тепер f (x) - будь-яка функція, безперервна або має кінцеве число точок розриву першого роду на відрізку [a, b]. Ряд Фур'є такої функції f (x) на тому ж відрізку по ортогональної системі називається ряд:
![]() ,
,
Якщо ряд Фур'є функції f (x) за системою (1) збігається до функції f (x) в кожній її точці безперервності, що належить відрізку [a, b]. У цьому випадку говорять що f (x) на відрізку [a, b] розкладається в ряд по ортогональної системі (1).