

Методичні вказівки до виконання лабораторних робіт і курсової роботи студентами 3-го курсу ФЕЛ.
Частина 1. Методичні вказівки до виконання лабораторних робіт.
Лабораторна робота №1.
Дослідження типових динамічних ланок.
Мета лабораторної роботи:
- вивчити можливості Matlab6.5 і Simulink;
- вивчити можливості Лінійного аналізу із Simulink;
- провести дослідження типових динамічних ланок.
Задача 1. Вивчення елементів, які потрібні для конструювання структурних схем автоматичних систем.
Відкрити вікно Matlab6.5;
Натиснути піктограму Simulink і Ви побачите вікно Simulink Library Browser;
Вивчить зміст наступних піктограм із Simulink:
Continuous;
Math. Operations;
Sinks;
Sources;
Simulink extras:
Additional Sinks;
4. Натиснути піктограму „File” у вікні Simulink Library Browser і Ви побачите вікно untitled;
5. Натиснути піктограму „Continuous”;
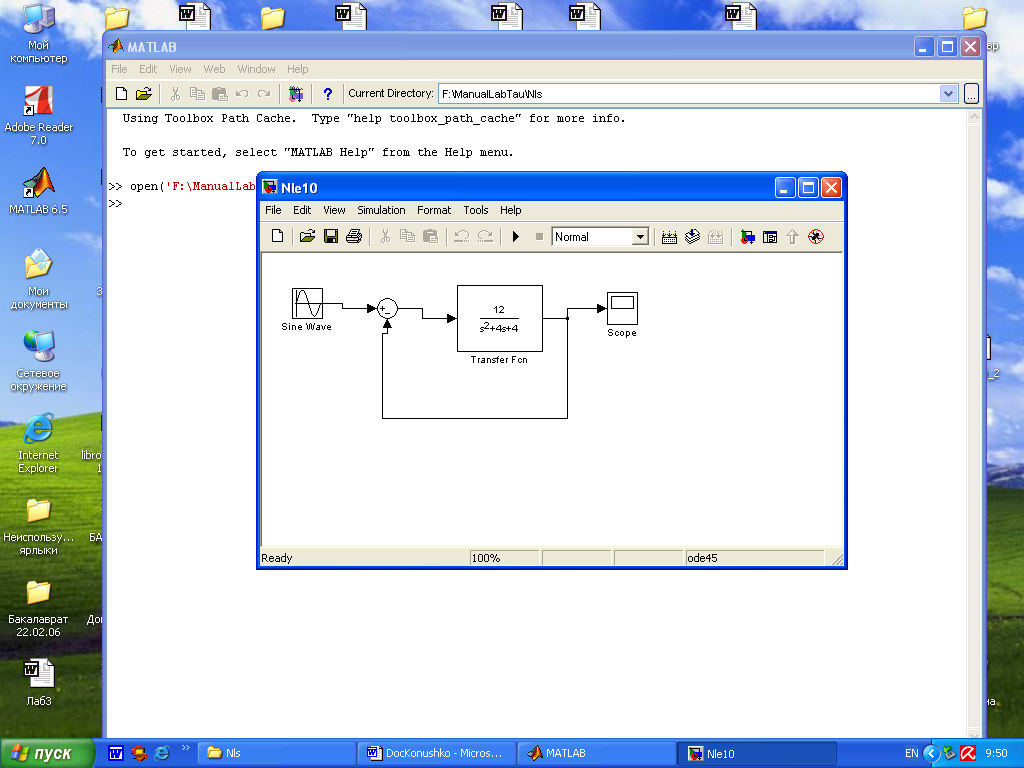
6. Перенести піктограму “Transfer Fcn” на біле поле вікна “untitled” і внести інформацію щодо наступних передаточних функцій послідовно:
![]()
![]()
Перенести піктограми Step
і Scope на біле поле вікна
“untitled” зліва і справа
від прямокутника із передаточною
функцією (![]() або
або
![]() )
і з’єднати їх для побудови САУ.
)
і з’єднати їх для побудови САУ.
7. Провести дослідження автоматичної системи (натиснути послідовно чорний трикутник у вікні untitled, а потім піктограму Scope і Ви побачите поведінку системи автоматичного регулювання).
Задача 2. Вивчення можливостей Лінійного аналізу Simulink (Linear analysis).
1. Відкрити вікно Matlab6.5;
2. Натиснути піктограму Simulink і Ви побачите вікно Simulink Library Browser;
3. Натиснути піктограму File;
4. Натиснути піктограму Continuous;
5. Перенести піктограму “Transfer Fcn” на біле поле вікна “untitled” і внести інформацію щодо передаточної функції згідно з п.6 Задачі 1.
6. Натиснути піктограму Tools у вікні “untitled”;
7. Натиснути піктограму Linear analysis;
8. Перенести піктограми Input Point і Output Point на біле поле вікна “untitled” зліва і справа від Вашої передаточної функції (“Transfer Fcn”);
9. З’єднати вхід Input Point і вихід Output Point до входу і виходу піктограми передаточної функції Transfer Fcn;
10. Натиснути піктограму Edit у вікні LTI Viewer:untitled;
11. Натиснути піктограму Plot configurations;
12. Обрати квадрат з 6 прямокутниками;
13. Обрати наступні функції у секції Response type:
- Step;
- Impulse;
- Bode;
- Nyquist;
- Nichols;
- Pole/Zero;
(кожний раз Ви повинні підтверджувати свій вибір);
13. Натиснути піктограму Simulink;
14. Натиснути піктограму Get Linearized Model і Ви побачите поведінку системи автоматичного регулювання.
Задача 3. Дослідження типових динамічних ланок за допомогою Лінійного аналізу.
3.1. Пропорційна ланка:
![]()
більш доцільно досліджувати інерційну ланку 1-го порядку з наступною передаточною функцією:
![]()
3.2. Ідеальний інтегратор:
![]()
3.3. Реальний інтегратор:
![]()
3.4. Реальний диференціатор:
![]()
1.5. Інерційна ланку 1-го порядку (аперіодична ланка1-го порядку):
![]()
Ви повинні довести, що наступна ланка з передаточною функцією є нестійкою:
![]()
1.6. Аперіодична ланка 2-го порядку:
![]()
where:
![]()
1.7. Коливальна ланка 2-го порядку:
![]()
де
![]() <1;
<1;
1.8. Консервативна ланка:
![]()
1.9. Нестійкі коливальні ланки 2-го порядку:
![]()
![]()
де <1.
Значення перемінних K і T Ви кожний обирає самостійно (K і T – числа, які мають значення від 1 до 15).
Контрольні запитання.
1. Основні принципи регулювання;
2. Основні елементи і зв’язки автоматичних систем;
3. Стандартні вхідні сигнали;
4. Складання диференціальних рівнянь САУ;
5. Форми запису диференціальних рівнянь САУ;
6. Основи лінеаризації диференціальних рівнянь САУ;
7. Поняття ланки САУ;
8. Поняття передаточної функції;
3. Поняття перехідної характеристики (step response);
4. Поняття функції ваги (impulse response);
5. Поняття частотної передаточна функція;
6. Поняття амплітудно-фазово-частотної характеристики;
7. Поняття амплітудно-частотної характеристики;
8. Поняття фазово-частотної характеристики;
9. Поняття логарифмічної амплітудно-частотної характеристики;
10. Поняття логарифмічної фазово-частотної характеристики.
11. Часові і частотні характеристики безінерційної ланки;
12. Часові і частотні характеристики інерційної ланки 1 порядку;
13. Часові і частотні характеристики коливальної ланки;
14. Часові і частотні характеристики аперіодичної ланки 2 порядку;
15. Часові і частотні характеристики консервативної ланки;
16. Часові і частотні характеристики ланок, що диференціюють;
17. Часові і частотні характеристики ланок, що інтегрують;
18. Приклади побудови передаточних функцій САУ;
Ваш звіт повинен мати інформацію щодо перехідних функції автоматичних систем, що досліджуються, а також графіки їх характеристик.
Лабораторна робота №2.
Перетворення структурних схем САУ.
Мета лабораторної роботи:
- вивчити можливості Matlab6.5 для визначення еквівалентних передаточних функцій САУ;
- вивчити Правила перетворення структурних схем САУ;
- провести перетворення структурних схем САУ за допомогою Matlab6.5.
Задача 1.
Вивчити наступні програми Matlab6.5:
series;
parallel;
feedback.
Задача 2.
Послідовний зв”язок ланок.
За допомогою відповідної програми Matlab6.5 необхідно визначити еквівалентну передаточну функцію САУ.
![]()
![]()
Значення
![]() кожний студент обирає самостійно (від
1 до 10).
кожний студент обирає самостійно (від
1 до 10).
Задача 3.
Паралельний зв”язок ланок.
За допомогою відповідної програми Matlab6.5 необхідно визначити еквівалентну передаточну функцію САУ.

![]()
![]()
Значення кожний студент обирає самостійно (від 1 до 10).
Задача 4.
Зустрічно-паралельне з’єднання ланок.
За допомогою відповідної програми Matlab6.5 необхідно визначити еквівалентну передаточну функцію САУ.

![]()
Значення кожний студент обирає самостійно (від 1 до 10).
Задача 5.
Визначити еквівалентну передаточну функцію за допомогою Правил перетворення структурних схем.


За допомогою відповідних програм Matlab6.5 необхідно визначити еквівалентну передаточну функцію САУ.
![]()
![]()
Значення кожний студент обирає самостійно (від 1 до 10).


![]()
Задача 6.
Визначити еквівалентну передаточну функцію за допомогою Правил перетворення структурних схем.


![]()
За допомогою відповідних програм Matlab6.5 необхідно визначити еквівалентну передаточну функцію САУ.
![]()
Значення кожний студент обирає самостійно (від 1 до 10).
Контрольні запитання.
1. Послідовне з’єднання ланок;
2. Паралельний зв’язок ланок;
3. Зустрічно-паралельний зв’язок ланок;
4. Використання „Правил перетворення структурних схем САУ” для визначення еквівалентної структурної схеми САУ;
5. Використання програм Matlab6.5 для визначення еквівалентної структурної схеми САУ;
6. Правила визначення передаточних функцій відносно сигналів управління та збурення.
Ваш звіт повинен містити необхідну інформацію щодо порядку перетворення структурних схем САУ і розрахунок еквівалентних передаточних функцій.
Лабораторна робота №3.
Застосування діаграми Найквіста і методу кореневого годографу для аналізу САУ.
Мета лабораторної роботи:
- вивчити використання діаграми Найквіста для аналізу стійкості САУ;
- вивчити метод кореневого годографу аналізу стійкості і якості САУ.
Задача 1. Вивчити наступні функції MatLab6.5:
nyquist, real, image, rlocus, rlocfind, residue.
Задача 2. Дослідження стійкості САУ за допомогою діаграми Найквіста.
Необхідно провести дослідження САУ з наступною передаточною функцією:
![]()
Програма MatLab6.5:
%K=1
H = tf([1],[1 2 1 0])
nyquist(H); grid
%K=2
H = tf([2],[1 2 1 0])
nyquist(H); grid
%K=3
H = tf([3],[1 2 1 0])
nyquist(H); grid
Ваша задача - побудувати 3 діаграми Найквіста і визначити випадки, коли САУ є:
стійка;
нестійка;
- знаходиться на межі стійкості.
Вам також необхідно підтвердити отримані результати за допомогою критерія Рауса-Гурвіца.
Задача 3.
Необхідно провести дослідження САУ з ланкою чистої затримки.

t0=[0.75 0.55 0];
w=0.3:0.1:4;
for k=1:3
[re, im, w]=nyquist([1],[1 2 1 0],w);
re, im
D1=exp(-j*t0(k)*w);
Gw=(re+j*im).*D1;
Greal=real(Gw); Gimag=imag(Gw);
plot(Greal, Gimag)
title('Nyquist Diagram'); xlabel('ReG(jw)');
ylabel('ImG(jw)'); grid; hold on
end
hold off
Ваша задача - побудувати 3 діаграми Найквіста і визначити випадки, коли САУ є:
стійка;
нестійка;
- знаходиться на межі стійкості.
Ви також повинні змінити параметри передаточної функції САУ, внести зміни у програму і провести дослідження стійкості САУ за допомогою діаграми Найквіста.
Задача 4.
Необхідно провести дослідження САУ з наступною передаточною функцією:
![]()
Ваша задача - побудувати діаграму Найквіста цієї САУ і зробити висновок щодо її стійкості.
Вам також необхідно підтвердити отримані результати за допомогою критерія Рауса-Гурвіца.
Задача 5.
Необхідно провести дослідження САУ з наступною передаточною функцією:
![]()
Ваша задача - побудувати діаграму Найквіста цієї САУ і зробити висновок щодо її стійкості.
Вам також необхідно підтвердити отримані результати за допомогою критерія Рауса-Гурвіца.
Задача 6.
Необхідно провести дослідження САУ з наступною передаточною функцією:
![]()
Параметри![]() кожний обирає самостійно у межах від 1
до 10.
кожний обирає самостійно у межах від 1
до 10.
Ваша задача - побудувати діаграму Найквіста цієї САУ і зробити висновок щодо її стійкості.
Задача 7.
Необхідно провести дослідження САУ з наступною передаточною функцією:
![]()
Параметри кожний обирає самостійно у межах від 1 до 10.
Ваша задача - побудувати діаграму Найквіста цієї САУ і зробити висновок щодо її стійкості.
Задача 8.
Необхідно провести дослідження САУ з наступною передаточною функцією:
![]()
Параметри кожний обирає самостійно у межах від 1 до 10.
Ваша задача - побудувати діаграму Найквіста цієї САУ і зробити висновок щодо її стійкості.
Задача 9.
Необхідно провести дослідження САУ з наступною передаточною функцією:
![]()
Параметри![]() кожний обирає самостійно у межах від 1
до 10.
кожний обирає самостійно у межах від 1
до 10.
Ваша задача - побудувати 3 діаграми Найквіста і визначити випадки, коли САУ є:
стійка;
нестійка;
- знаходиться на межі стійкості.
Задача 10.
Виконати наступну програму:
%Nyquist diagram
%G(s)=0.5/(s3+2s2+s+0.5)
%which allows to calculate gain and phase margins
%
num=[0.5]; den=[1 2 1 0.5]; sys=tf(num,den);
%
[mag,phase,w]=bode(sys);
[Gm,Pm,Wcg,Wcp]=margin(mag,phase,w);
%
nyquist(sys);
title(['Gm=',num2str(Gm),',Pm=', num2str(Pm)])
Ви також повинні змінити параметри передаточної функції САУ, внести зміни у програму і провести дослідження стійкості САУ за допомогою діаграми Найквіста.
Задача 11.
Вивчити порядок побудови і аналізу САУ за допомогою методу кореневого годографу.
Розглянемо САУ з наступною розімкненою передаточною функцією:
![]()
Правило №2:
Кореневий годограф починається у:
полюсах: s=1; s = -2; s = - 3; і закінчується у 3 нулях у нескінченості;
Правило №3:
![]()
r =±1, ±3, …
Кореневий годограф має 3 асимптоти з кутами нахилу:
± 600; 1800; які перетинають дійсну вісь у точці:
![]()
Правило №4:
Кореневий годограф включає частину дійсної осі у межах інтервалів:
a) -2<s<1 (зліва від однієї особливості передаточної функції);
b) s<-3; (зліва від 3 особливостей передаточної функції).
c) s>1 – не містить ніяких особливостей;
d) -3<s<-2 (розташовано зліва від 2 особливостей передаточної функції, тому ці ділянки не входять до кореневого годографу.
Правило №5:
Точки відриву:
![]()
Поліном має такі корені:
s = - 2.54; (згідно з Правилом #4 ця точка не належить кореневому годографу (насправді ця точка є точкою відриву для тієї частини кореневого годографу, яка відповідає K<0), але у цьому розділі ми не розглядаємо негативні значення К.
s= -0.132; ця точка належить кореневому годографу і вона також є точкою відриву.
Для визначення діапазону значень K, який забезпечує стійкість САУ, ми використовуємо критерій Рауса-Гурвіца:
![]()
![]()
Таблиця Рауса:
s3 |
1 |
1 |
|
s2 |
4 |
K-6 |
|
s |
(10 – K)/4 |
|
→ K<10 |
s0 |
K-6 |
|
→ K>6 |
САУ є стійкою, якщо: 6<K<10;
Із Таблиці Рауса виходить, що якщо K = 6, тоді замкнена САУ має полюс s =0;
Ми також маємо можливість визначити
значення K, при якому полюс буде розташовано
на початку координат:
![]() |
S=0=
|
S=0=![]() |
S=0 =6;
|
S=0 =6;
При зростанні значень K до K=10 (межа стійкості САУ) критерій Рауса-Гурвіца дає додатковий поліном:
![]()
Таким чином, при K = 10 передаточна функція замкненої САУ має полюси: ±j.
| S=j= | S=j =10;
Ви також бачите, що критерій Рауса-Гурвіца значно поширює можливості цього методу.
Для побудови кореневого годографу цієї САУ можна використати наступну програму.
rlocus([1],[1 4 1 -6])
Задача 12.
Розглянемо САУ з наступною розімкненою передаточною функцією:
![]()
Ваша задача – побудувати кореневий годограф цієї системи і пояснити його.
Задача 13.
Розглянемо САУ з наступною розімкненою передаточною функцією:
![]()
Ваша задача – побудувати кореневий годограф цієї системи і пояснити його.
Задача 14.
Розглянемо САУ з наступною розімкненою передаточною функцією:
![]()
Ваша задача – побудувати кореневий годограф цієї системи і пояснити його.
Задача 15.
Розглянемо САУ з наступною розімкненою передаточною функцією:
![]()
Ваша задача – побудувати кореневий годограф цієї системи і пояснити його.
Задача 16.
Розглянемо САУ з наступною розімкненою передаточною функцією:
![]()
Ваша задача – побудувати кореневий годограф цієї системи і пояснити його.
Задача 17.
Виконати наступну програму:
p=[1 1]; q=[1 5 6 0];
sys=tf(p,q);
rlocus(sys)
rlocfind(sys)
MatLab надасть відповідь:
“Select a point in the graphics window”
Ми в змозі використати спеціальні засоби GUI і відмітити будь-яку точку на побудованому кореневому годографі.
Після Вашої помітки MatLab надасть відповідь:
“selected_point =
-2.1007 - 3.0559i”
і Ви отримуєте значення K для цієї точки:
“ans =
11.1198”
Задача 18.
Вивчення функції „residue”.
K=20.5775;
num=K*[1 4 3];
den=[1 5 6+K K 0];
[r,p,k]=residue(num,den)
Задача 19.
Розрахунок чутливості кореня при зміни параметра САУ.
% The calculation of root’s sensitivity at the change in a parameter
%
K=20.5775;
den=[1 5 6+K K];
r1=roots(den);
%
dK=1.0289;
%
Km=K+dK; denm=[1 5 6+Km Km]; r2=roots(denm);
dr=r1-r2;
%
S=dr/(dK/K);
plot(S)
Контрольні запитання.
1. Критерій Найквіста;
5. Критерій Рауса-Гурвіца;
1. Визначення кореневого годографу;
2. Кутовий критерій;
3. Амплітудний критерій;
4. Правило перетинання асимптот;
5. Визначення точок відриву;
6. Правила конструювання кореневого годографу;
Ваш звіт повинен містити необхідну інформацію щодо передаточних функцій САУ, які досліджуються, необхідні розрахунки, їх характеристики і показники стійкості.
Лабораторна робота 4.
Мета лабораторної роботи:
вивчити порядок побудови і аналізу діаграми Нікольса;
вивчити порядок побудови і аналізу логарифмічних характеристик.
Задача 1. Вивчити наступні функції MatLab6.5:
nichols, logspace, ngrid, clf, margin, semilogx.
Задача 2. Побудова і аналіз діаграми Нікольса.
Розглянемо наступну передаточну функцію розімкненої САУ:
![]()
num=[1]; den=[0.2 1.2 1 0];
sys=tf(num,den);
w=logspace(-1,1,400);
nichols(sys,w);
ngrid
Ваша задача – змінити параметри передаточної функції САУ і побудувати діаграму Нікольса.
Задача 3. Побудова і аналіз діаграми Нікольса.
Розглянемо САУ, яка містить 2 данки.
%Remotely guided reconnaissance vehicle
%
numgc=[1 2]; dengc=[1 1]; sysgc=tf(numgc,dengc);
numg=[1]; deng=[1 2 4]; sysg=tf(numg,deng);
sys=series(sysgc,sysg);
%
w=logspace(-1,1,200);
%
K=[20,10,4.44]
hold off, clf
for i=1:3
nichols(K(i)*sys,w), ngrid
hold on
end
Ваша задача визначити еквівалентну передаточну функція цієї САУ і побудувати її діаграму Нікольса, потім змінити її параметри і знову побудувати діаграму Ніколаса.
Задача 4.
Розглянемо наступні передаточні функції САУ:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Ваша задача побудувати діаграми Ніколаса і порівняти їх з даними відповідної Таблиці.
Значення
![]() Ви повинні обрати самостійно від 1 до
15.
Ви повинні обрати самостійно від 1 до
15.
Задача 5. Побудова діаграми Bode.
Розглянемо наступну передаточну функцію розімкненої САУ:
![]()
Програма:
nn=30; a=-1; b=1;
w=logspace(a,b,nn);
[mag,phase,w]=bode([1],[1 1 0],w);
db=20*log10(mag);
phased1=(-0.2)*57.296*w;
phase=phase+phased1;
subplot(211), semilogx(w,db)
title('Bode diagram'); xlabel('frequency');
ylabel('db'); grid
subplot(212), semilogx(w,phase)
xlabel('frequency'); ylabel('phase'); grid
Ваша задача – змінити параметри передаточної функції САУ і побудувати діаграму Bode.
Задача 6. Побудова діаграми Bode.
Розглянемо наступну передаточну функцію розімкненої САУ:
![]()
Програма:
G=tf([1],[1 2 1 0]);
T1=G/(1+G); T2=0.5*G/(1+0.5*G);
bode(T1), hold on
bode(T2), hold off, pause
t=0:0.5:20
step(T1,t), hold on
step(T2,t), hold off
Ваша задача – змінити параметри передаточної функції САУ і побудувати перехідні характеристики і діаграму Bode.
Задача 7. Використання програми margin:
hd = tf([…],[…])
[Gm,Pm,Wcg,Wcp] = margin(hd);
margin(hd)
Отримуйте значення запасів стійкості САУ за модулем і фазою, використовуючи дані Задачі 4 і порівняйте отримані результати з відповідною Таблицею.
Контрольні питання.
1. Критерій якості у часовій і частотній галузях;
2. Логарифмічні частотні характеристики САУ;
3. Аналіз стійкості САУ з використанням діаграми Нікольса;
4. Загальне поняття стійкості САУ;
5. Визначення запасів стійкості за модулем і фазою;
6. Частотні критерії стійкості САУ.
Ваш звіт повинен містити необхідні характеристики та розрахунки і підлягає захисту.
Лабораторна робота №5.
Мета цієї роботи – вивчити типові прилади, що корегують, і вплив зворотних зв”язків на характеристики САУ.
Примітка: значення відповідних констант
(![]() )
обираються кожним студентом самостійно
у межах від 1 до 15.
)
обираються кожним студентом самостійно
у межах від 1 до 15.
Задача 1. Провести дослідження наступних передаточних функцій приладів, що корегують, за допомогою Лінійного аналізу.
Ваша задача – обрати відповідні значення констант з метою отримання бажаних характеристик ланок згідно з матеріалами відповідної лекції.
1.1. Пасивна ланка, що диференціює:
![]()
1.2. Пасивна ланка, що інтегрує:
![]()
1.3. Пасивна ланка, що інтегрує і диференціює:
![]()
1.4. Пасивна ланка з фазовим зсувом:
![]()
1.5. Пасивна анті-вібраційна ланка:
![]()
Задача 2. Провести порівняльний аналіз САУ без зворотного зв”язку і з наступними передаточними функціями ланок зворотного зв”язку за допомогою Лінійного аналізу.
2.1. Ланка 1-го порядку з негативним жорстким зворотним зв”язком.
![]()
![]() constant;
constant;

2.2. Ланка 1-го порядку з негативним гнучким зворотним зв”язком.
![]()
2.3. Ланка 2-го порядку з негативним жорстким зворотним зв”язком (Ви повинні розглянути коливальну, аперіодичну і консервативну ланки).
![]()
![]()
2.4. Ланка 2-го порядку з негативним гнучким зворотним зв”язком (Ви повинні розглянути коливальну, аперіодичну і консервативну ланки).
2.5. Ланка, що інтегрує з негативним жорстким зворотним зв”язком.
![]()
![]()
Контрольні питання.
1. Характеристики пасивної ланки, що диференціює;
2. Характеристики пасивної ланки, що інтегрує;
3. Характеристики пасивної ланки, що диференціює і інтегрує;
4. Характеристики пасивної ланки з фазовим зсувом;
5. Характеристики пасивної анті-вібраційної ланки;
6. Прилади, що корегують;
7. Послідовні прилади, що корегують;
8. Вплив зворотних зв”язків на характеристики типових ланок;
Ваш звіт повинен містити необхідні характеристики та розрахунки і підлягає захисту.
Лабораторна робота 6.
Мета цієї лабораторної роботи – вивчити процедуру синтезу САУ за допомогою MatLab.
Пам’ятайте, що значення перемінних Ви повинні обрати самостійно у межах від 1 до 15.
Задача 1. Вивчення наступних функцій:
ones, axis, evalfr, angle.
Задача 2. Дослідження чутливості САУ до зміни параметрів об’єкту регулювання.
%Sensitivity graph of the control system
%
K=20; num=[1 1 0]; den=[1 12 K];
w=logspace(-1,3,200); s=w*i;
n=s.^2+s; d=s.^2+12*s+K; S=n./d;
n2=s; d2=K; S2=n2./d2;
%
subplot(211), plot(real(S), imag(S))
title('System sensitivity to the change in object parameters')
xlabel('Real(S)'), ylabel('Imag(S)'),grid
subplot(212), loglog(w,abs(S),w,abs(S2), '-')
xlabel('w[rad/sec]'), ylabel('Abs(S)'),grid
Зелена лінія відноситься до функції
![]()
голуба лінія відноситься до функції
![]()
Ваша задача – провести дослідження, змінюючи значення K від 20 до 100 і отримати висновок щодо чутливості САУ.
Задача 3. Процедура синтезу для регулятора з випередженням фази.
![]()

Вимоги до якості САУ:
- час перехідного процесу![]()
- відносне перерегулювання
![]()
Відносне перерегулювання
![]()
![]()
Крок 1
K=500;
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
sys=K*sysg;
%
[Gm,Pm,Wcg,Wcp] = margin(sys);
%
Phi=(60-Pm)*pi/180;
alpha=(1+sin(Phi))/(1-sin(Phi))
[mag,phase,w]=bode(sys);
mag_save(1,:)=mag(:,1,:);
%
M=-10*log10(alpha)*ones(length(w),1);
%
semilogx(w,20*log10(mag_save),w,M), grid
xlabel('Frequency(rad/s)'); ylabel('Amplitude(dB)')
Крок 2 – діаграмма Боде для САУ з корекцією.
K=1800;
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
numgc=K*[1 3.5]; dengc=[1 25]; sysgc=tf(numgc,dengc);
sys=series(sysgc,sysg);
margin(sys)
Крок 3 – перехідна характеристика.
K=1800;
%
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
numgc=K*[1 3.5]; dengc=[1 25]; sysgc=tf(numgc,dengc);
%
syso=series(sysgc,sysg);
sys=feedback(syso,[1]);
%
t=[0:0.01:2];
step(sys,t);
ylabel('y(t)')
Остаточно визначаємо регулятор:
![]()
Ваша задача – змінити параметри цієї САУ і отримати новий регулятор за допомогою цієї процедури.
Задача 4. Метод кореневого годографу для визначення регулятора з відставанням фази.
Вимоги до регулятора:
![]()
Остаточно визначаємо регулятор:
![]()
Крок 1. Кореневий годограф для САУ без корекції.
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
clf; rlocus(sysg); hold on
%
zeta=0.5912; wn=2.2555;
%
x=[-10:0.1:-zeta*wn]; y=-(sqrt(1-zeta^2)/zeta)*x;
xc=[-10:0.1:-zeta*wn]; c=sqrt(wn^2-xc.^2);
%
plot(x,y,':',x,-y,':',xc,-c,':')
axis([-15,1,-10,10]);
Крок 2. Кореневий годограф для САУ із корекцією.
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
numgc=[1 0.1]; dengc=[1 0.01];
sysgc=tf(numgc,dengc);
sys=series(sysgc, sysg);
clf; rlocus(sys); hold on
%
zeta=0.5912; wn=2.2555;
%
x=[-10:0.1:-zeta*wn]; y=-(sqrt(1-zeta^2)/zeta)*x;
xc=[-10:0.1:-zeta*wn]; c=sqrt(wn^2-xc.^2);
plot(x,y,':',x,-y,':',xc,-c,':')
axis([-15,1,-10,10]);
Крок 3 – перехідна характеристика.
K=100;
%
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
numgc=K*[1 0.1]; dengc=[1 0.01]; sysgc=tf(numgc,dengc);
%
syso=series(sysgc,sysg);
sys=feedback(syso,[1]);
%
t=[0:0.01:20];
step(sys,t);
xlabel('Time(s)'),ylabel('y(t)'),grid
Ваша задача – визначити наступні показники:
Відносне перерегулювання при ступеневому вхідному сигналі;
Час перехідного поцесу;
Сталу похибку при вхідному сигналі, що лінійно зростає.
Задача 5. ПІД регулятор.
Програма:
KI=[0.005 0.05 0.5]; phim=50; w1=1.7;
Gp=tf([0 0 0 4],[1 3 2 0]);
for k=1:3
Gpjw1=evalfr(Gp,j*w1);
Gpjw1mag=abs(Gpjw1);
theta=-pi+phim/57.296-angle(Gpjw1);
KP=cos(theta)/Gpjw1mag;
KD=sin(theta)/(w1*Gpjw1mag)+KI(k)/w1^2;
[KP, KI(k), KD]
Gc=tf([0 KD KP KI(k)],[0 0 1 0]);
T=minreal(Gc*Gp/(1+Gc*Gp));
pole(T), pause, [Gm,Pm,Wcg,Wcp]=margin(Gc*Gp), pause
end
end
Ваша задача – змінити параметри САУ і отримати новий регулятор за допомогою вказаної процедури.
Задача 6. Визначення параметрів регулятора і полюсів замкненої САУ.
![]()
Програма:
phim=50; w1=[1.7 2 3]; a0=1;
Gp=tf([4],[1 3 2 0]);
for k=1:3
Gpjw1=evalfr(Gp,j*w1(k));
Gpjw1mag=abs(Gpjw1);
theta=-pi+phim/57.296-angle(Gpjw1);
a1=(1-a0*Gpjw1mag*cos(theta))/(w1(k)*Gpjw1mag*sin(theta))
b1=(cos(theta)-a0*Gpjw1mag)/(w1(k)*sin(theta))
Gc=tf([a1/b1 a0/b1],[1 1/b1]), pause
T=minreal(Gc*Gp/(1+Gc*Gp));
pole(T), pause, [Gm,Pm,Wcg,Wcp]=margin(Gc*Gp), pause
end
Ваша задача – змінити параметри САУ і отримати новий регулятор за допомогою вказаної процедури.
Контрольні питання.
1. Визначення чутливості САУ;
2. Послідовні кола, що корегують;
3. Корегувальні пристрої з випередженням фази;
4. Корегувальні пристрої з відставанням фази;
5. Корегувальні пристрої, що інтегрують;
6. Синтез САУ з використанням методу кореневого годографу;
7. Синтез з використанням діаграми Боде, аналітичних методів і комп’ютерних програм;
8. Корекція САУ за рахунок зміни коефіцієнта підсилення;
9. САУ з попереднім фільтром;
10. САУ з аперіодичною реакцією;
11. Пропорційне разом з диференційним керуванням (ПД керування);
12. Пропорційне разом з диференційним і інтегральним керуванням (ПІД керування).
Ваш звіт повинен містити необхідні характеристики та розрахунки і підлягає захисту.
Лабораторна робота №7.
Мета лабораторної роботи:
провести дослідження нелінійних САУ;
провести дослідження САУ у просторі станів.
Задача 1. Вивчити можливості і параметри наступних нелінійних блоків Simulink:
- Backlash (побудувати схему і провести дослідження цього блоку);
- Coulomb and Viscous Friction;
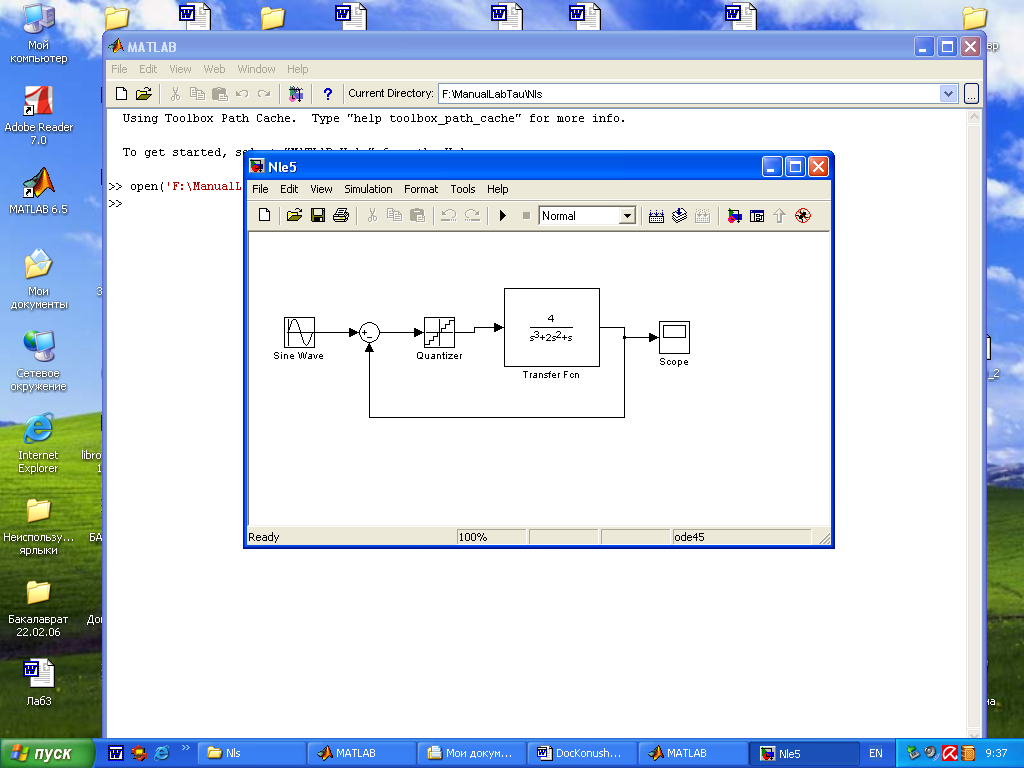
- Quantizer;
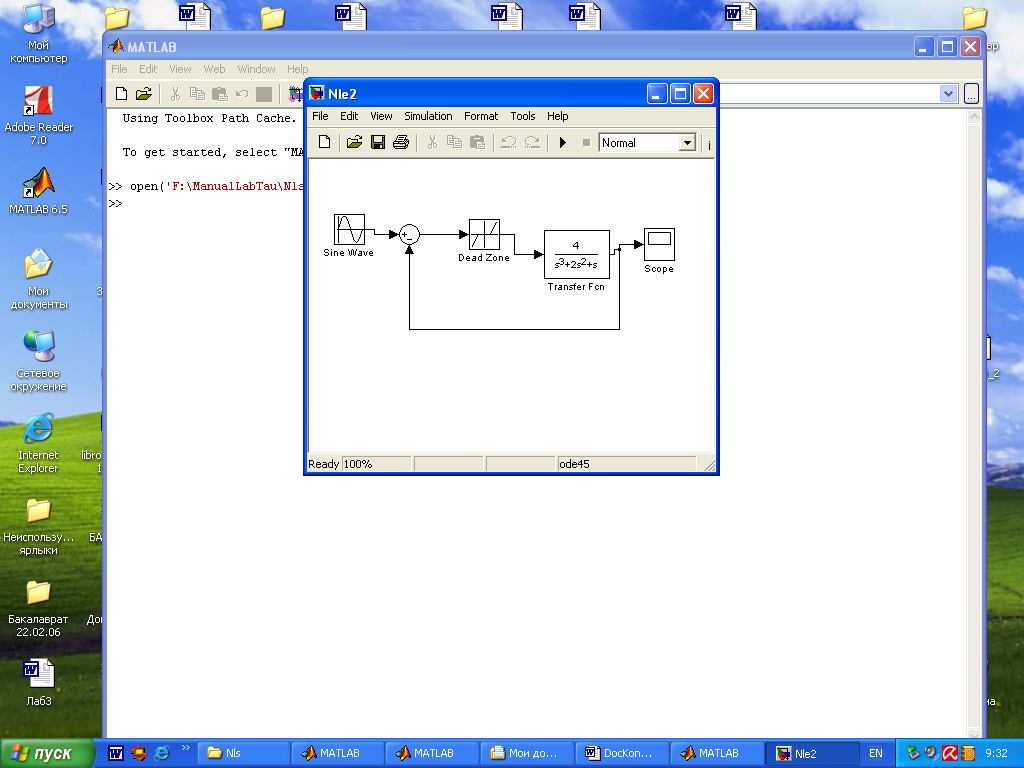
- Dead Zone (побудувати схему і провести дослідження цього блоку);
- Hit Crossing;
- Rate Limiter;
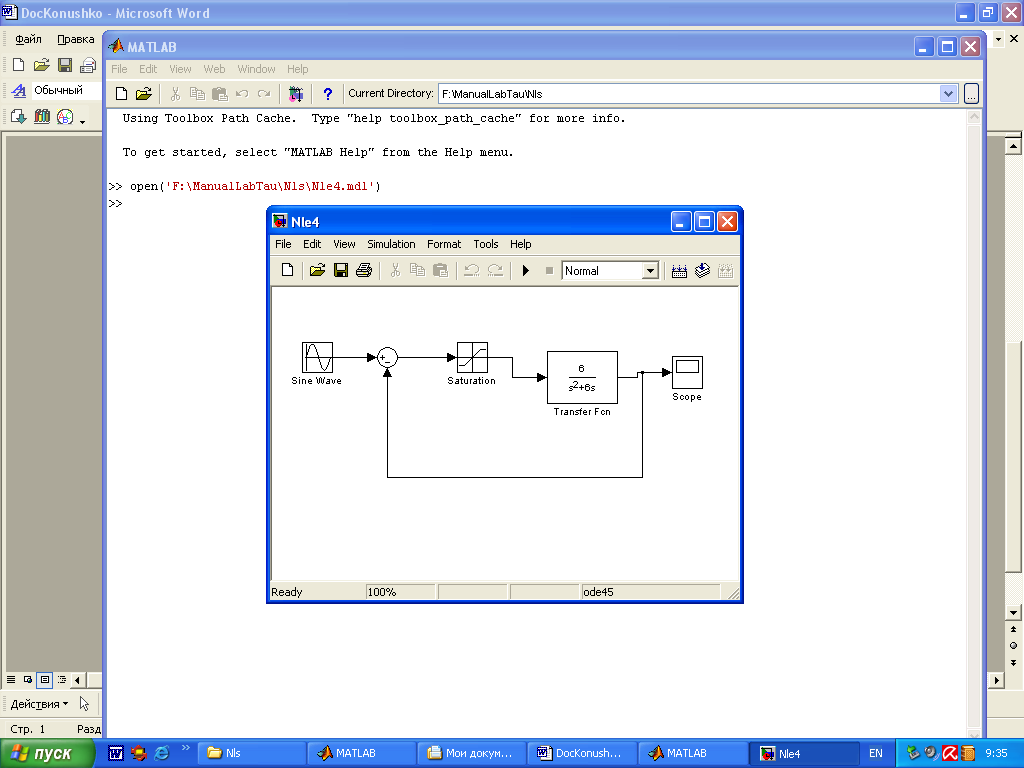
- Saturation;
- Relay.
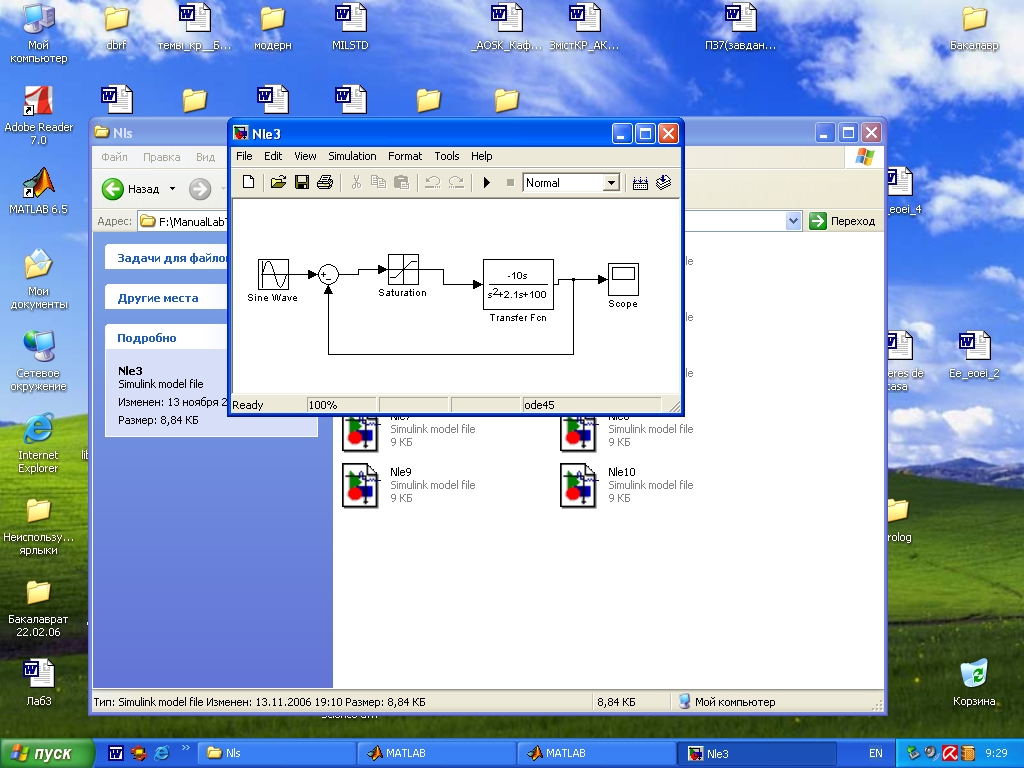
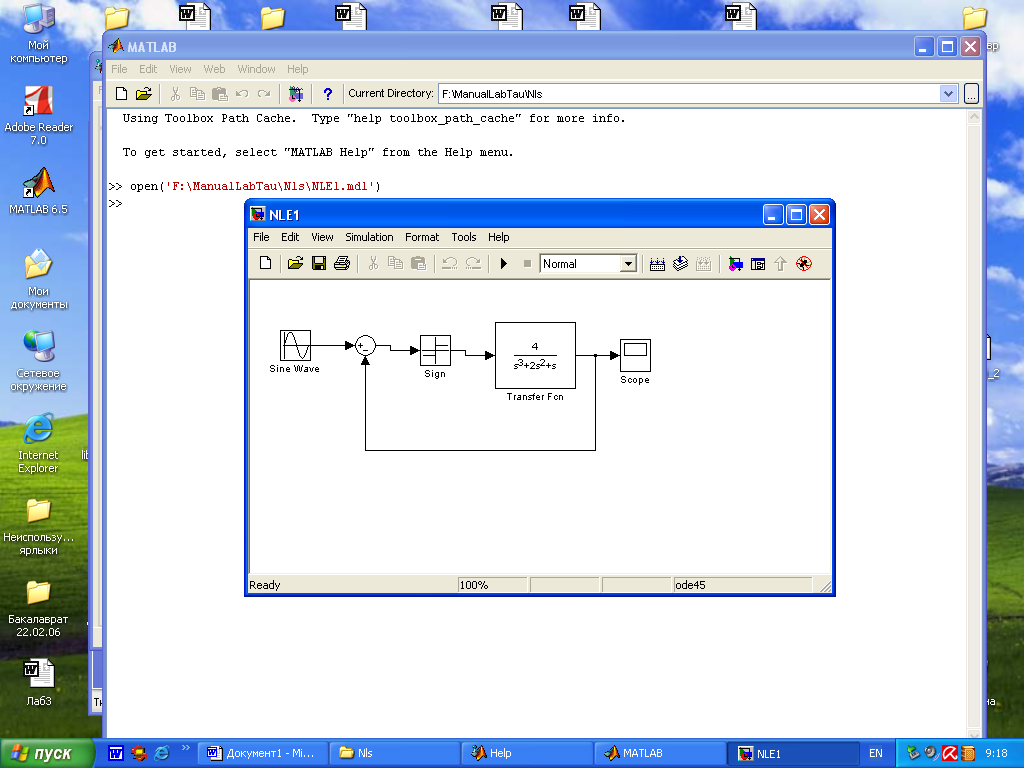
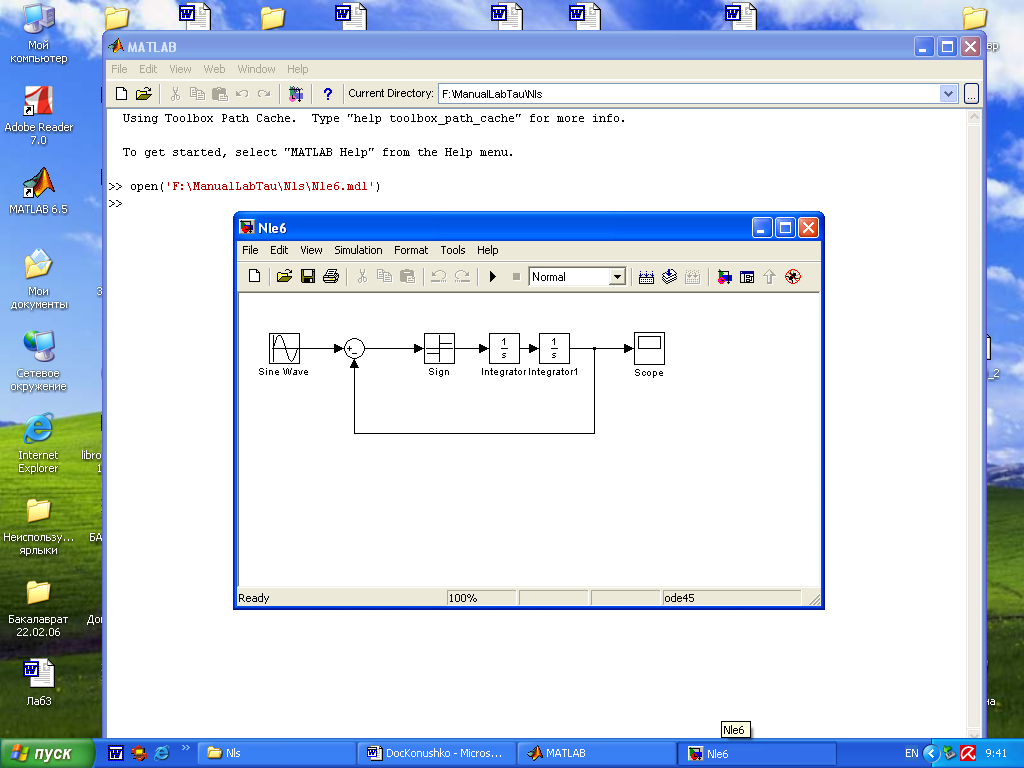
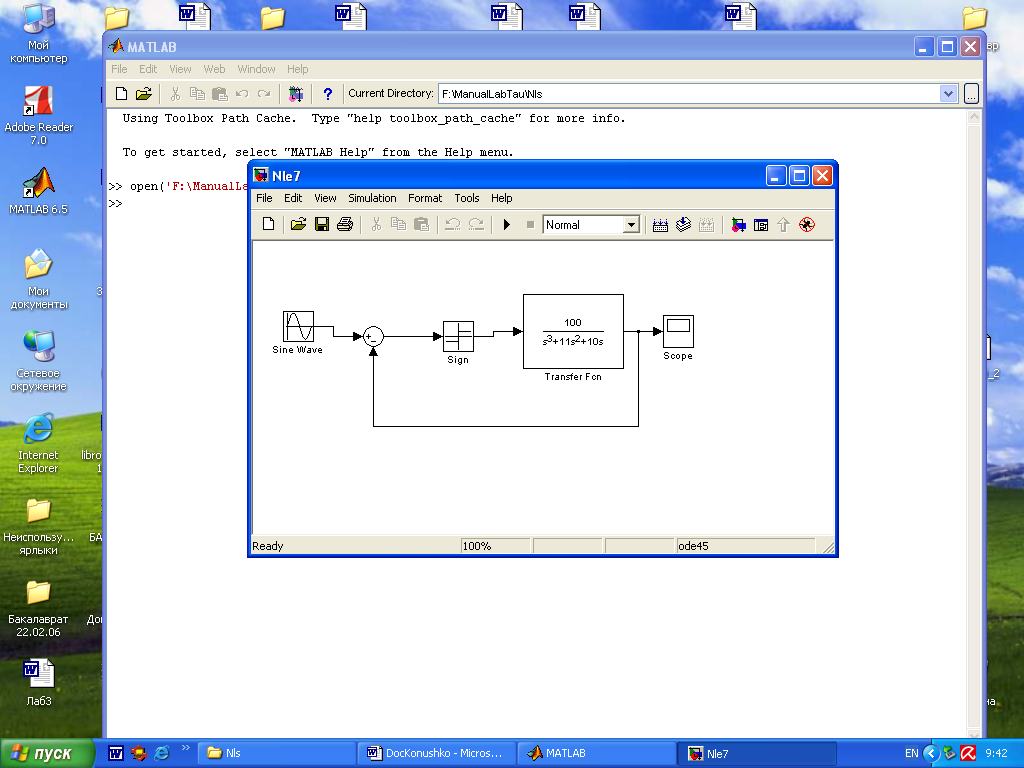
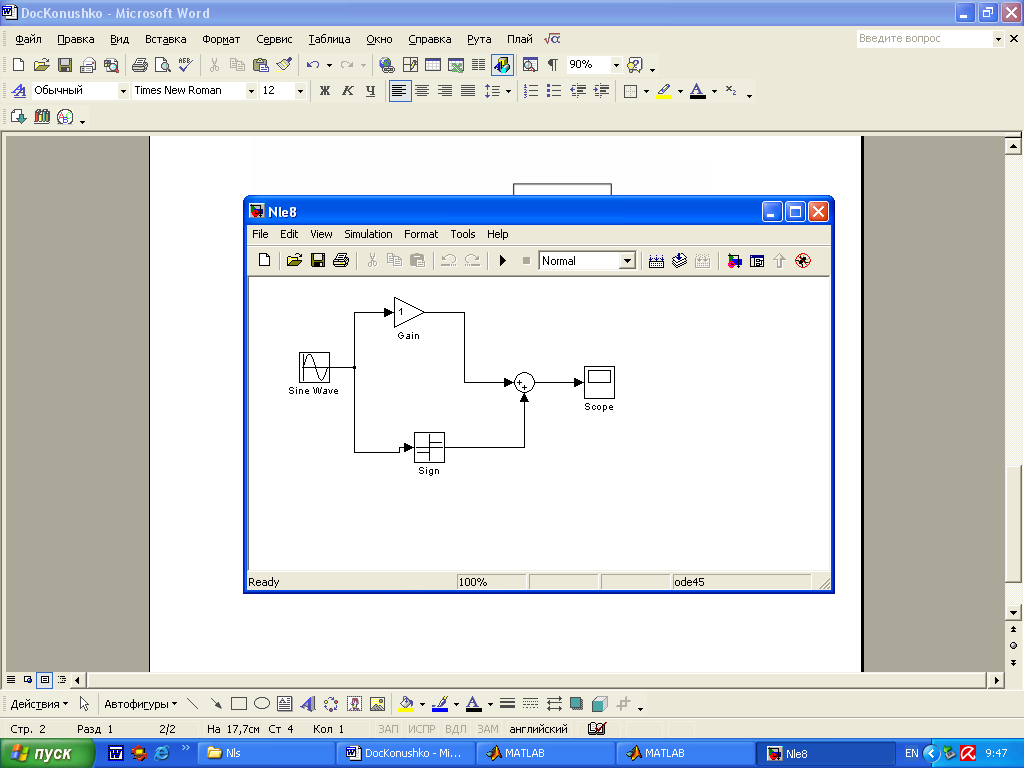
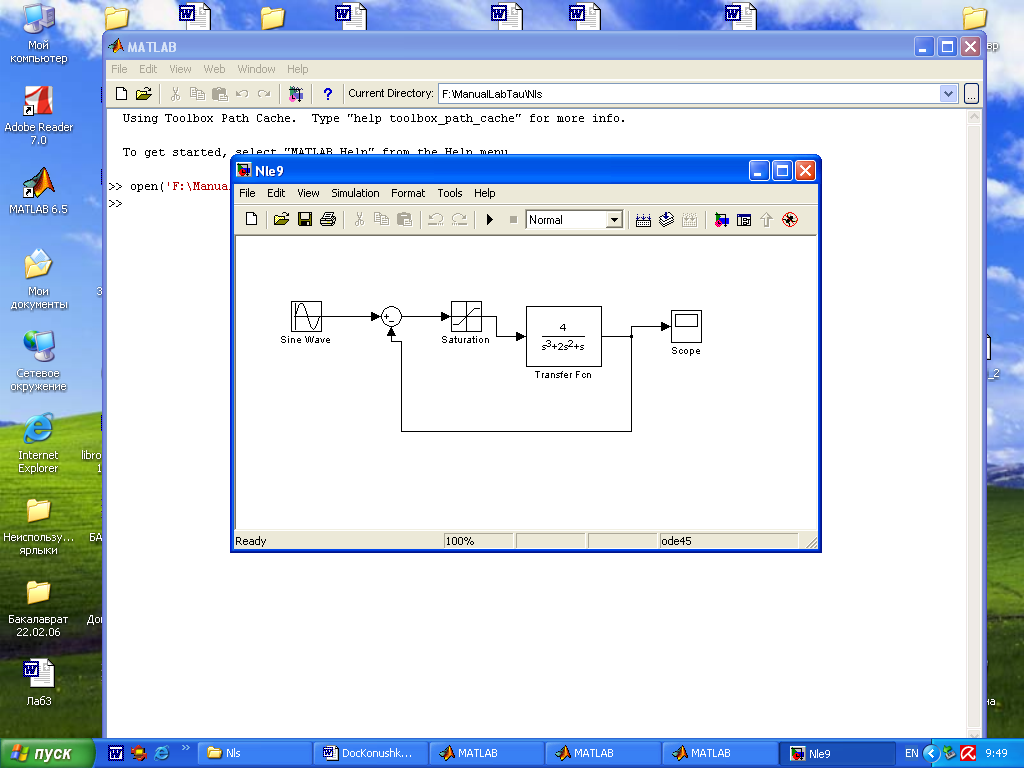
Задача 2. Провести дослідження наступних 10 структурних схем нелінійних САУ.
Ваша задача – змінити запропоновані параметри нелінійних елементів , передаточних функцій ланок і зворотних зв”язків і отримати нові дані.
Задача 3. Дослідження моделей САУ у просторі станів.
1. Відкрити програму “Help” у Matlab6.5.
У блоці “Search for” надрукувати “State-Space Models” і вивчити наступну модель електричного двигуна:
![]() ,
,
де:
θ – кут обертання ротора;
I – струм якоря.
Модель двигуна у просторі станів:
![]()
B=![]()
C=[0 1];
d=0.
Ця модель визначається за допомогою наступної функції Matlab6.5:
sys = ss([0 1;-5 -2],[0;3],[0 1],0)
Задача 4.
Ваша задача – порівняти дані досліджень системи автоматичного управління за допомогою Лінійного аналізу, які матиме 2 форми:
передаточну функцію;
модель у просторі станів.
Приклад 4.1.
![]()
![]()
![]()
Приклад 4.2.
![]()
![]()
![]()
![]()
Приклад 4.3.
![]()
![]()
Приклад 4.4.
G(s)=
![]()
![]()
B=![]()
C=[-17;-5];
d=1.
Приклад 4.5.
G(s)=
![]()
B=![]()
C=[8;6;1];
d=0.
Приклад 4.6.
G(s)=
![]()
![]()
B=
C=[1;0];
d=0.
Приклад 4.7.
G(s)=
![]()
B=![]()
C=[4;1;0];
d=0.
Приклад 4.8.
G(s)=
![]()
B=
![]() ;
;
d=0.
Контрольні запитання.
1. Особливості використання критерію Найквіста для аналізу нелінійних САУ;
2. Властивості нелінійних САУ;
3. Нелінійні блоки Simulink, їх властивості і параметри;
4. Метод гармонійної лінеаризації (Describing function);
5. Стійкість граничних циклів. Частотний метод В.М. Попова;
6. Визначення автоколивань у нелінійній САУ за методом Е.П.Попова;
7. Методи дослідження нелінійних САУ;
8. Метод точкових перетворень;
9. Метод припасовування;
10. Метод лінеаризації;
11. Рівноважні стани і стійкість за Ляпуновим;
12. Аналіз нелінійних САУ за допомогою метода фазових траєкторій;
13. Методи уникнення шкідливого впливу нелінійних елементів;
14. Орієнтовані графи САУ, формула Мейсона;
15. Моделі САУ у просторі станів;
16. Рівняння стану САУ;
17. Рівняння виходу САУ;
18. Пряма декомпозиція передаточних функцій САУ;
19. Каскадна декомпозиція передаточних функцій САУ;
20. Паралельна декомпозиція передаточних функцій САУ.
Ваш звіт повинен містити необхідні характеристики та розрахунки і підлягає захисту.
Лабораторна робота 8.
Задача цієї роботи – провести дослідження:
використання програми для розрахунку еквівалентної передаточної функції САУ за допомогою формули Мейсона;
керованості і спостережливості САУ;
дискретних і цифрових САУ.
Задача 1.
Ми маємо наступну структурну схему САУ.
Програма Matlab для визначення еквівалентної передаточної функції САУ за допомогою формули Мейсона:
syms c e f r m n g1 g2 g3 g4 g5 g6 h1 h2
eq1=e-g1*r+h1*f;
eq2=-g2*e+f;
eq3=m-g3*f-g6*r+h2*n;
eq4=n-g4*m;
eq5=c-g5*n;
s=solve(eq1, eq2, eq3, eq4, eq5, e, c, f, m, n)
s.c
ans =
g5*g4*r*(h1*g2*g6+g6+g3*g2*g1)/(1+h2*g4+h1*g2+h1*g2*h2*g4)
Ваша задача – побудувати новий орієнтований граф САУ і визначити еквівалентну передаточну функцію САУ за допомогою формули Мейсона.
Задача 2.
1. Відкрити програму “Help” і вивчити функцію tf2ss;
2. Використовуючи приклади 2.1 – 2.8 із Лабораторної роботи 7 провести необхідні перетворення і порівняти різні форми представлення САУ.
Задача 3.
2.1. Використовуючи приклади 2.1 – 2.8 із Лабораторної роботи 7 виконайте наступні вправи:
sys = sys1+sys2
sys = sys1*sys2
2.2. Використовуючи приклади 2.1 – 2.8 із Лабораторної роботи 7 виконайте наступні вправи:
sys = series(sys1,sys2)
sys = parallel(sys1,sys2)
sys = feedback(sys1,sys2)
Задача 4. Вивчити наступні функції:
ctrb, ctrbf, obsv, obsvf.
Задача 5.
Орієнтований граф САУ.
Ви маєте інформацію щодо моделі САУ у просторі станів:
A=[-1 1 0;0 0 0;5 0 -5];
B=[1;5;0];
C=[0 0 1];
d=0.
A=[-1 1 0;0 0 0;5 0 -5];
B=[1;5;0];
Co=ctrb(A,B)
det(Co), pause
A=[-1 1 0;0 0 0;5 0 -5];
C=[0 0 1];
Ob=obsv(A,C)
det(Ob), pause
Ваша задача – провести дослідження керованості і спостережності цієї САУ.
Спробуйте змінити параметри САУ і провести дослідження керованості і спостережності САУ із іншими параметрами.
Задача 6.
Розглянемо наступну дискретну САУ:

Ця система може бути зображена наступною Z-передаточною функцією:
![]()
Програма 1: