

2 Ctатика
22. Cтатика - раздел теоретической механики, в котором изучаются условия равновесия (покоя) материальных тел и особенности их механического взаимодействия, а также методы преобразования систем сил в эквивалентные им системы.
Для решения задач статики используются два основных метода: геометрическо-графический и аналитический. Задачи по первому методу решаются путем графических построений. Этот метод прост, нагляден, но оправдан лишь в случае решения простых задач. Аналитический метод универсален, дает возможность компьютеризировать решение любых, даже самых сложных задач, поэтому имеет чрезвычайно широкое применение.
В статике основным объектом изучения (рассмотрения) является твердое тело (или система тел), находящееся в покое (равновесии) под действием внешних сил. Основные виды сил и систем сил и признаки, по которым силы и системы сил объединяются в отдельные группы, виды, представлены на рисунке 3 и рисунке 4.
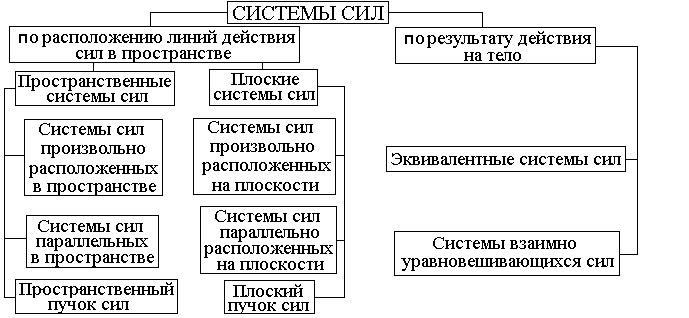
Рисунок 3
23. Пространственными называются системы сил, линии действия которых не лежат в одной плоскости.
2 4.
Плоскими называются системы сил,
линии действия которых расположены в
одной плоскости.
4.
Плоскими называются системы сил,
линии действия которых расположены в
одной плоскости.
Рисунок 4
25. Произвольная пространственная система сил - система сил, линии действия которых произвольно расположены в пространстве.
26. Пространственная параллельная система сил - система сил, линии действия которых параллельно расположены в пространстве. Например, силы тяжести (вес тела), силы инерции при поступательном движении .
27. Пространственный пучок сил - пространственная система сил, линии действия которых пересекаются в одной точке.
28. Плоская произвольная система сил - система сил, линии действия которых произвольно расположены в одной плоскости.
29. Плоская параллельная система сил - система сил, линии действия которых параллельно расположены в одной плоскости.
30. Плоский пучок сил - плоская система сил, линии действия которых пересекаются в одной точке.
31. Эквивалентные системы сил - системы сил, под действием каждой из которых твердое тело находится в одинаковом кинематическом состоянии.
32. Система взаимноуравновешивающихся сил - система сил, которая будучи приложенной к твердому телу, находящемуся в определенном - кинематическом состоянии (например в покое), не выводит его из этого состояния.
33. Система внешних сил - система сил, действующих на материальные точки (тела) данной механической системы со стороны точек (тел), не принадлежащих этой системе.
34. Сосредоточенная сила - сила, приложенная к телу в какой-нибудь точке. Сосредоточенные силы отражают интенсивность, направление и характер механического взаимодействия двух тел, имеющих одну единственную точку контакта, например, игла давит на поверхность.
35. Система внутренних сил (внутренние силы) - система сил взаимодействия между материальными точками (телами) рассматриваемой системы (тела).
36. Распределенные силы (нагрузки) - силы, действующие на все точки данного объема или поверхности тела, которые отражают направление и характер взаимодействия двух тел, контактирующих или по линии, или по площади на их поверхности, или отражают воздействие на рассматриваемое тело внешних физических полей, распределенное по всему объему (всей массе) тела. Например, силы давления на поверхность тела со стороны сплошных сред (газов, жидкостей, сыпучих материалов и т.п.); силы тяжести (веса) тела; силы инерции. Мера действия таких сил называется интенсивностью нагрузки и измеряется в: Н/м; Н/м2; Н/м3.
37. Активные (задаваемые) силы - силы, отражающие действие на рассматриваемое тело других тел.
В основу статики положены несколько аксиом. Аксиомы статики - относительные истины, имеющие опытное происхождение и принимаемые без доказательств. Как и всякие аксиомы, аксиомы статики содержат в себе некоторые элементы объективной истины и являются лишь ее частью, сформулированной для абсолютно твердого тела, что ограничивает их применение, так как все реальные тела в действительности деформируются при внешних воздействиях.
38. Аксиома инерции. Под действием взаимно уравновешивающихся сил материальная точка (тело) находится в состоянии покоя (равновесия) или движется прямолинейно и равномерно.
3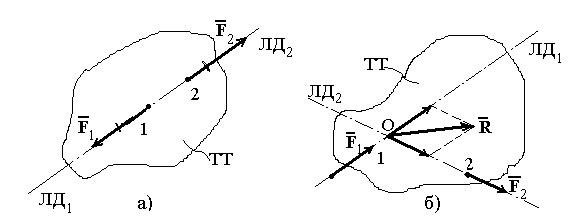 9.
Аксиома равновесия двух сил. Две
силы, приложенные к твердому телу,
взаимно уравновешиваются в том случае,
если их модули равны и они направлены
по одной прямой в противоположные
стороны:
9.
Аксиома равновесия двух сил. Две
силы, приложенные к твердому телу,
взаимно уравновешиваются в том случае,
если их модули равны и они направлены
по одной прямой в противоположные
стороны:
![]() (рисунок 5а).
(рисунок 5а).
Рисунок 5 - Взаимно уравновешивающиеся силы - а;
параллелограмм сил - б.
40. Аксиома присоединения (или исключения) уравновешивающихся сил. Действие системы сил на твердое тело не изменится, если к ней присоединить (или из нее исключить) систему взаимно уравновешивающихся сил.
41. Аксиома переноса сил по их линии действия. Не изменяя кинематического состояния тела, силы можно переносить вдоль линий их действия, сохраняя неизменными их модули и направления действия, см. рисунок 5б.
42. Аксиома параллелограмма сил.
Равнодействующaя
![]() двух пересекающихся сил
двух пересекающихся сил
![]() приложена
в точке
приложена
в точке
![]() их пересечения и изображается диагональю
параллелограмма, построенного на этих
силах, см. рисунок 5б, где
их пересечения и изображается диагональю
параллелограмма, построенного на этих
силах, см. рисунок 5б, где
![]()
![]()
43. Аксиома равенства действия и
противодействия. Всякому действию
существует равное и противоположно
направленное противодействие (рисунок
6а), где
![]() - сила действия первого твердого тела
- сила действия первого твердого тела
![]() на второе
на второе
![]() ;
;
![]() -
сила противодействия первому телу
со стороны второго
.
-
сила противодействия первому телу
со стороны второго
.
С
 илы
действия и противодействия не являются
взаимно уравновешивающимися, так как
приложены к разным телам, а именно:
илы
действия и противодействия не являются
взаимно уравновешивающимися, так как
приложены к разным телам, а именно:
![]() к
к
![]() ;
к
.
;
к
.
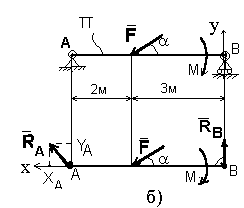
Рисунок 6 - Силы действия и противодействия - а;
построение расчетной схемы - б
44. Аксиома (принцип) освобождения от связей. Равновесие твердого тела не нарушится, если его мысленно освободить от связей и заменить их действие на тело реакциями связей, другими словами, несвободное твердое тело можно рассматривать как свободное, если мысленно отбросить связи и отразить их действие на тело реакциями этих связей, см. рисунок 6 б.
45. Количественную оценку интенсивности механического взаимодействия, в результате которого рассматриваемое тело стремится повернуться в ту или другую сторону, а также направление этого поворота дают понятия: момент силы и момент пары сил (рисунок 7).

Рисунок 7 - Виды моментов силы и пары сил
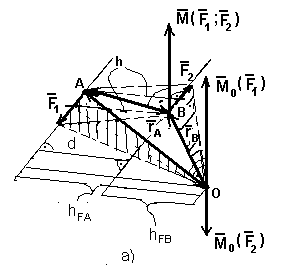
46. Векторный момент силы относительно
точки - вектор
![]() ,
равный произведению радиус-вектора
,
равный произведению радиус-вектора
![]() основания
вектора
на вектор
силы,
направленный перпендикулярно плоскости,
проходящей через вектор
силы
и данную точку
так, чтобы, смотря с его вершины, можно
было видеть поворот силы
вокруг этой точки в направлении,
противоположном вращению часовой
стрелки (рисунок 8а), где
основания
вектора
на вектор
силы,
направленный перпендикулярно плоскости,
проходящей через вектор
силы
и данную точку
так, чтобы, смотря с его вершины, можно
было видеть поворот силы
вокруг этой точки в направлении,
противоположном вращению часовой
стрелки (рисунок 8а), где
![]()
![]()
![]()
![]()
Р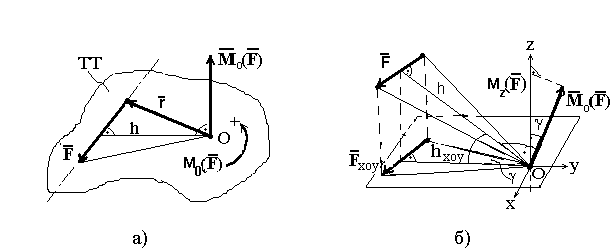 исунок
8 - Момент силы относительно точки - а;
исунок
8 - Момент силы относительно точки - а;
относительно оси - б.
47. Алгебраический момент силы
относительно точки - алгебраическая
величина![]() ,
взятая со знаком плюс (+) или минус (-) и
равная по величине произведению модуля
на ее плечо
,
взятая со знаком плюс (+) или минус (-) и
равная по величине произведению модуля
на ее плечо
![]() относительно
данной точки
,
см. рисунок 8а.
относительно
данной точки
,
см. рисунок 8а.
Алгебраический момент силы относительно точки считается положительным (+), если сила стремится повернуть тело вокруг точки в плоскости действия силы в направлении, противоположном вращению часовой стрелки. В противном случае алгебраический момент силы относительно точки считается отрицательным (-).
48. Плечо силы относительно точки - кратчайшее расстояние от точки О до линии действия силы в плоскости ее действия - плоскости, проходящей через линию действия силы и данную точку.
49. Момент силы относительно оси -
алгебраическая величина
![]() ,
взятая со знаком плюс (+) или минус (-),
и равная произведению модуля
,
взятая со знаком плюс (+) или минус (-),
и равная произведению модуля
![]() проекции
проекции
![]() силы
на
плоскость
силы
на
плоскость
![]() перпендикулярно данной оси
перпендикулярно данной оси
![]() ,
на плечо
,
на плечо
![]() этой проекции относительно данной
оси
,
см. рисунок 8б, где
этой проекции относительно данной
оси
,
см. рисунок 8б, где
![]()
![]()
Момент силы относительно оси считается
положительным (+), если, смотря с
вершины оси, виден поворот проекции
силы на плоскость перпендикулярную оси
![]() вокруг оси в направлении противоположном
вращению часовой стрелки. В противном
случае момент считается отрицательным
(вращение по часовой стрелке).
вокруг оси в направлении противоположном
вращению часовой стрелки. В противном
случае момент считается отрицательным
(вращение по часовой стрелке).
50. Плечо проекции силы относительно оси - кратчайшее расстояние в плоскости от линии действия проекции до оси .
51. Если данная система имеет равнодействующую, то момент равнодействующей системы сил относительно точки (или оси) равен сумме моментов ее составляющих относительно той же точки (оси) - теорема Вариньона, справедлива как для алгебраических, так и для векторных моментов.
52. Векторный момент пары сил - вектор,
направленный перпендикулярно плоскости
действия пары
![]() сил
и
так,
чтобы, смотря с его вершины, можно было
видеть поворот пары сил в плоскости ее
действия в направлении, противоположном
вращению часовой стрелки (рисунок 9а),
где
сил
и
так,
чтобы, смотря с его вершины, можно было
видеть поворот пары сил в плоскости ее
действия в направлении, противоположном
вращению часовой стрелки (рисунок 9а),
где
 т.к
т.к
![]() т.к.
т.к.
![]()
Точка О - любая точка в плоскости действия пары сил.
Вектор
![]() - скользящий, его можно переносить
параллельно самому себе.
- скользящий, его можно переносить
параллельно самому себе.
Р
 исунок
9 - Момент пары сил: векторный - а,
алгебраический - б
исунок
9 - Момент пары сил: векторный - а,
алгебраический - б
53. Алгебраический момент пары сил
![]() - алгебраическая величина, взятая со
знаком плюс (+) или минус (-) и равная
произведению модуля
- алгебраическая величина, взятая со
знаком плюс (+) или минус (-) и равная
произведению модуля
![]() сил, составляющих пару
сил, составляющих пару
![]() , на ее плечо
,
т.е.
, на ее плечо
,
т.е.
![]() ,
см. рисунок 9б. Правило знаков для
алгебраического момента пары сил то
же, что и для алгебраического момента
силы относительно точки.
,
см. рисунок 9б. Правило знаков для
алгебраического момента пары сил то
же, что и для алгебраического момента
силы относительно точки.
Задача о преобразовании данной системы сил в эквивалентные ей системы решается путем приведения этой системы cил к произвольно выбранному центру приведения. При этом применяется теорема Пуансо о параллельном переносе силы.
54. Силу
![]() ,
не изменяя ее действия на тело (рисунок
10а), можно перенести из точки ее приложения,
например -
,
не изменяя ее действия на тело (рисунок
10а), можно перенести из точки ее приложения,
например -
![]() ,
в любую другую точку, например -
,
этого тела, приложив при этом к телу
(рисунок 10б) пару сил
,
в любую другую точку, например -
,
этого тела, приложив при этом к телу
(рисунок 10б) пару сил
![]() с векторным моментом
с векторным моментом
![]() ,
равным векторному моменту
,
равным векторному моменту
![]() этой силы относительно выбранной
точки
- теорема Пуансо. Точка
- центр приведения.
этой силы относительно выбранной
точки
- теорема Пуансо. Точка
- центр приведения.
55. Для системы сил теорема Пуансо
формулируется следующим образом: Систему
сил
![]() ,
не изменяя ее действия на тело,
можно заменить силой
,
равной главному вектору
,
не изменяя ее действия на тело,
можно заменить силой
,
равной главному вектору
![]() этой
системы сил и приложенной в центре
приведения, и парой сил, с векторным
моментом
этой
системы сил и приложенной в центре
приведения, и парой сил, с векторным
моментом
![]() ,
равным главному моменту
,
равным главному моменту
![]() всех сил данной системы относительно
центра приведения.
всех сил данной системы относительно
центра приведения.
56. Главный вектор
системы сил - вектор, равный геометрической
сумме всех сил данной системы сил.
![]() .
.
![]() - не есть равнодействующая данной
системы сил. Равнодействующая - понятие
механическое. Главный вектор системы
- понятие геометрическое.
- не есть равнодействующая данной
системы сил. Равнодействующая - понятие
механическое. Главный вектор системы
- понятие геометрическое.
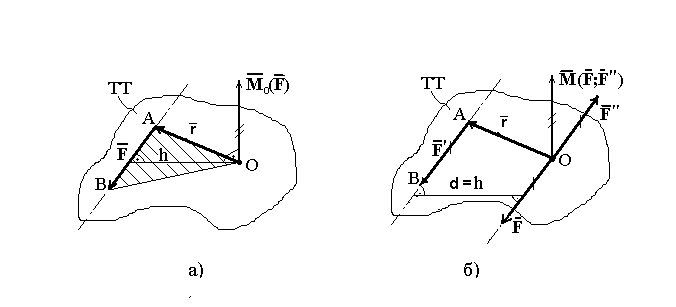 Рисунок 10 - Эквивалентная замена
действия одной силы - а, действием силы
и пары сил - б
Рисунок 10 - Эквивалентная замена
действия одной силы - а, действием силы
и пары сил - б
57. Главный момент системы сил - вектор, равный геометрической сумме векторных моментов всех сил данной системы сил, определенных относительно выбранного центра ( точка ), т.е.
![]() .
.
58. Центр приведения - любая точка рассматриваемого тела.
59. Если при приведении системы сил к любому центру главный вектор и главный момент равны нулю, то эта система сил - система взаимно уравновешивающихся сил, а рассматриваемое тело находится в равновесии (покое), т.е. для систем сил см. рисунок 3 имеем:
1)
![]() (1);
(1);
![]() (2) - условия равновесия (покоя)
произвольной пространственной
системы сил в векторной форме, то же
в аналитической форме ( в проекциях на
оси декартовой системы координат):
(2) - условия равновесия (покоя)
произвольной пространственной
системы сил в векторной форме, то же
в аналитической форме ( в проекциях на
оси декартовой системы координат):
![]() ,
(1)
,
(1)
![]() ,
(4)
,
(4)
![]() ,
(2)
,
(2)
![]() ,
(5)
,
(5)
![]() ,
(3)
,
(3)
![]() .
(6)
.
(6)
2) (1); (2)
, (1) , (2) , (3) - условия равновесия (покоя) системы сил параллельных (в данном случае оси oz) в пространстве;
3)
, (1) , (2) , (3) - условия равновесия (покоя) пространственного пучка сил;
4) (1); (2)
,
(1)
,
(2)
![]() ,
(3) - условия равновесия (покоя)
произвольной плоской системы сил;
,
(3) - условия равновесия (покоя)
произвольной плоской системы сил;
5) (1); (2)
, (1) (2) - условия равновесия (покоя) системы сил параллельных (в данном случае оси oy) на плоскости;
6)
, (1) , (2) - условия равновесия (покоя) плоского пучка сил;
В определенных случаях пространственная (или плоская) система параллельных сил приводится к одной равнодействующей, приложенной к рассматриваемому телу в некоторой точке.
60. Точка, в которой к рассматриваемому телу приложена равнодействующая системы параллельных сил называется центром параллельных сил. Например, центр тяжести (центр масс) твердых тел - центр параллельных сил тяжести, действующих на все частички твердого тела, он же - центр параллельных сил инерции, действующих на все частицы тела при его поступательном движении.
В теоретической механике все результаты получены и справедливы для абсолютно твердых тел. В действительности все реально существующие тела в той или иной степени деформируются, опираясь на твердые поверхности, под действием внешних сил, в частности под действием собственного веса. Поэтому для того, чтобы перекатить деформируемое тело по твердой, даже ровной поверхности, необходимо преодолеть сопротивление качению (рисунок 11а), где
![]()
![]() ,
,
![]() ,
,
![]() -
сила нормального давления;
-
сила нормального давления;
![]() -скатывающая
сила;
-скатывающая
сила;
![]() - нормальная составляющая реакции
опорной поверхности;
- нормальная составляющая реакции
опорной поверхности;
![]() -
пара сопротивления качению,
-
пара сопротивления качению,
![]() -
коэффициент сопротивления качению -
плечо пары сопротивления качению,
-
коэффициент сопротивления качению -
плечо пары сопротивления качению,
![]() - сила сцепления (трения) -
касательная, составляющая реакции
опорной поверхности.
- сила сцепления (трения) -
касательная, составляющая реакции
опорной поверхности.
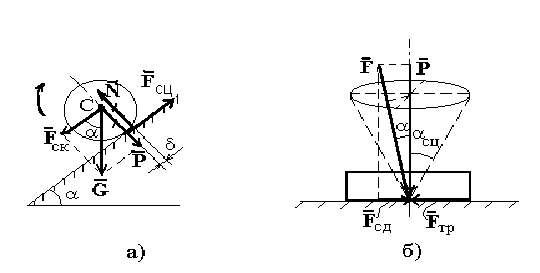
Рисунок 11 - Сопротивление качению - а; конус трения - б
61. Момент сопротивления качению -
момент пары
сил сопротивления качению, равный
произведению модуля одной из сил,
составляющих пару сил на ее плечо -
коэффициент сопротивления качению, см.
рисунок 11а,
![]() .
.
62. Коэффициент сопротивления качению - расстояние, на которое в направлении перекатывания смещена нормальная составляющая полной реакции твердой опорной поверхности как связи, см. рисунок 11а.
Противодействие сдвигу и перемещению тела вдоль твердой шероховатой поверхности обуславливает трение (сцепление) микронеровностей трущихся поверхностей.
Количественную оценку интенсивности
трения дает сила
![]() трения и коэффициент
трения и коэффициент
![]() трения скольжения (или покоя),
(рисунок 11б), где
трения скольжения (или покоя),
(рисунок 11б), где
![]()
![]()
![]()
![]()
![]() -
усилие сдвига;
-
усилие сдвига;
![]() -
сила нормального давления;
-
сила нормального давления;
![]() -
нормальная составляющая полной реакции
поверхности как связи;
- сила трения (касательная составляющая
полной реакции поверхности как связи);
-
внешняя активная сила.
-
нормальная составляющая полной реакции
поверхности как связи;
- сила трения (касательная составляющая
полной реакции поверхности как связи);
-
внешняя активная сила.
63. Сила трения определяется как часть силы нормального давления через коэффициент трения.
64. Коэффициент трения скольжения - безразмерная величина, определяемая опытным путем, численное значение которой зависит от материала трущихся поверхностей, их шероховатости, наличия смазки.
Для данной пары трения существует
вполне определенный диапазон от![]() до
до![]() углов
углов
![]() между внешней активной силой
и вертикалью, в пределах которого тело
не может быть сдвинуто, как бы ни велика
была сила
по
модулю, так как в этом случае сила
сдвига
меньше (или равна при
между внешней активной силой
и вертикалью, в пределах которого тело
не может быть сдвинуто, как бы ни велика
была сила
по
модулю, так как в этом случае сила
сдвига
меньше (или равна при
![]() )
силы трения
, см. рисунок 11б.
)
силы трения
, см. рисунок 11б.
65. Угол между активной силой и вертикалью, при котором сила сдвига равна силе трения, и сдвиг все еще невозможен, называется углом трения. Углом трения называется также наибольший угол между наклонной плоскостью и горизонтом, при котором твердое тело, покоящееся на плоскости, еще не приходит в движение.
66. Конус, образованный вокруг вертикали
с углом
![]() при вершине, при расположении в пределах
которого внешней активной
силы
сдвиг невозможен ( как бы она ни была
велика), называется конусом трения.
при вершине, при расположении в пределах
которого внешней активной
силы
сдвиг невозможен ( как бы она ни была
велика), называется конусом трения.
При значениях угол больших , т.е. при расположении силы вне конуса трения, тело может быть сдвинуто (приведено в движение), как бы ни был мал модуль этой силы.