

2.2. Системы счета направлений
2.2.1. Круговая система счета
Круговая система счета направлений является основной системой счета. В этой системе горизонт делится на 360° (рис. 2.3) и счет направлений ведется от 0° до 360° от северной части истинного меридиана наблюдателя NИ вправо по ходу часовой стрелки.
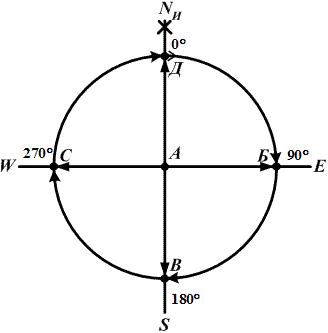
Рис. 2.3. Круговая система счета направлений
Наблюдатель (т. А) – в центре.
Тогда направления:
на т. Б – 90°;
на т. В – 180°;
на т. С – 270°;
на т. Д – 360° или 0°.
Если при расчете направлений получится значение более 360° (390°), то от результата следует вычесть 360° (т.е. один оборот 390° – 360° = 30°).
Круговая система счета направлений применяется в судовождении для определения направления движения судна (курс) и определения направления с судна на береговые ориентиры, соседние суда и пр. (пеленг).
2.2.2. Полукруговая система счета
|
|
а) |
б) |
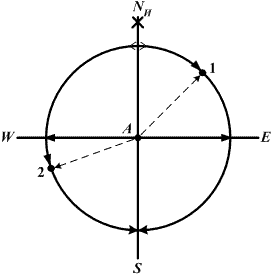
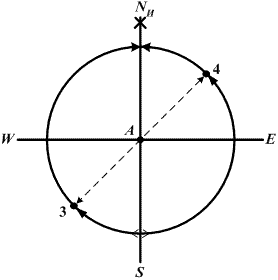
Рис. 2.4. Полукруговая система счета направлений
В полукруговой системе счета (рис. 2.4) счет направлений ведется от северной или южной части истинного меридиана наблюдателя в сторону востока Е или запада W в пределах от 0° до 180°.
Для исключения многозначности в полукруговой системе счета числовому значению направления дается наименование. Например:
т.1 N 45°E; т.2 N 105°W (рис. 2.4а).
т.3 S 45°W; т.4 S 135°E (рис. 2.4б).
Первая буква наименования – от какой части ИМН (N или S) идет счет.
Вторая буква наименования – в каком направлении идет счет (к Е или к W).
Полукруговая система счета обычно применяется в мореходной астрономии.
Правила перехода от полукруговой системы счета направлений в круговую:
Если наименование N…E → оставь число (45°) без изменения, отбрось наименование (т. 1).
Если наименование N…W → от 360° вычти число (360° – 105° = 255°), отбрось наименование (т. 2).
Если наименование S…W → к 180° добавь число (180° + 45° = 225°), отбрось наименование (т. 3).
Если наименование S…Е → от 180° вычти число (180° – 135° = 45°), отбрось наименование (т. 4).
2.2.3. Четвертная система счета
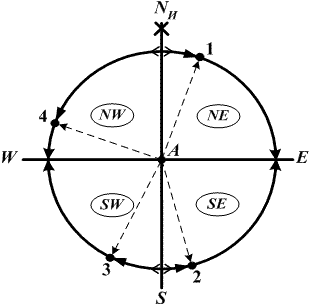
Рис. 2.5. Четвертая система счета направлений
В четвертной системе счета направлений (рис. 2.5) счет направлений ведется от северной (N) и южной (S) части ИМН в сторону востока (Е) и в сторону запада (W) в пределах от 0° до 90°.
В данной системе счета числовому значению направления дается наименование, соответствующее наименованию четверти. Например:
т.1 10°NE; т.2 10°SE;
т.3 30°SW; т.4 70°NW.
Четвертная система счета направлений также будет нам встречаться при решении задач мореходной астрономии.
Переход от четвертной системы счета к круговой аналогичен изложенному в п. Б, т.е.:
Если наименование NE → оставь величину угла без изменений (10°) → т. 1;
Если наименование SЕ → взять дополнение величины угла до 180° (170°) → т. 2;
Если наименование SW → к величине угла прибавь 180°(210°) → т. 3;
Если наименование NW → взять дополнение величины угла до 360° (290°) → т. 4.