

Датчики и исполнительные механизмы
Рис. 1.14 Структурная схема АСУ ТП АЭС
7) СКВМ – система контроля вибрации механизмов – обеспечивает контроль и диагностику основного оборудования реакторной установки с целью раннего выявления аномальных вибрационных состояний этого оборудования. Система СКВМ относится к уровню низовой автоматики, а по влиянию на безопасность–к системам нормальной эксплуатации, важным для безопасности.
8) СКУ ПЗ - система, предназначенная для автоматического обнаружения очагов пожара, сигнализации и запуска систем пожаротушения, управления ими, вентсистемами и системами дымоудаления в процессе ликвидации пожара. СКУ ПЗ относится к уровню низовой автоматики, а по влиянию на безопасность – к системам безопасности.
Фун к ц и и СКУ ПЗ . Система предназначена для обнаружения и туше-
ния пожара в помещениях, содержащих оборудование систем, важных для
безопасности, и систем нормальной эксплуатации, не влияющих на безопас-
ность, и по отношению к безопасности классифицируется как система нор-
мальной эксплуатации, важная для безопасности класса ЗН.
СКУ ПЗ общеблочных сооружений предназначена для обнаружения и
тушения пожара в помещениях, содержащих оборудование систем нормальной
эксплуатации, не влияющих на безопасность, и по отношению к безопасности
классифицируется как система нормальной эксплуатации класса 4Н.
Сигнализация о пожаре в зданиях энергоблока предусматривается на БПУ
и при наличии такового, на пункте пожарной безопасности, а также на РПУ.
Сигнал о пожаре на энергоблоке автоматически передается в объектовое
подразделение пожарной охраны.
9) СКУ ТО – система контроля и управления машзала и турбинного отделения - предназначена для выполнения функций защит и блокировок, дистанционного управления, автоматического регулирования и технологической сигнализации применительно к технологическим системам турбинного отделения. СКУ ТО относится к уровню низовой автоматики и содержит подсистемы нормальной эксплуатации, важные для безопасности и подсистемы нормальной эксплуатации, не влияющие на безопасность станции.
Фун к ц и и СКУ ТО. По отношению к безопасности СКУ ТО класси-
фицируется по классу 4Н и относится к УСНЭ.
СКУ ТО предназначена для автоматизации управления технологическими
процессами турбинного отделения во всех предусмотренных проектом режи-
мах работы энергоблока и обеспечения контроля параметров режима и состоя-
ния технологического оборудования.
В состав объекта управления входят следующие технологические систе-
мы нормальной эксплуатации:
турбина с системой автоматического регулирования и защиты;
система маслоснабжения;
валоповоротное устройство и насосы гидроподъема;
конденсатный тракт;
питательный тракт;
эжекторная установка;
система подачи пара на уплотнения;
системы дренажей;
регенерация низкого давления;
регенерация высокого давления;
сепаратор-пароперегреватель;
БРУ-К;
система пара собственных нужд;
система отбора низкого давления;
система отбора высокого давления;
68
система основной охлаждающей воды;
система охлаждающей воды неответственных потребителей;
система подвода масла к вспомогательному оборудованию машзала;
деаэратор и др.
К системам нормальной эксплуатации, важных для безопасности, отно-
сятся:
система свежего пара;
система питательной воды.
В общем случае функции и задачи СКУ ТО соответствуют функциям,
приведенным в п. 2.1.
С целью стабилизации режимных параметров предусмотрены следующие
автоматические регуляторы:
температура масла на смазку;
уровень в конденсаторе;
уровень в подогревателях низкого и высокого давления;
подача пара на уплотнения;
уровень в сепаратосборнике сепаратора-пароперегревателя (СПП);
температура греющего пара СПП;
уровень в конденсатосборнике СПП;
уровень в деаэраторе.
К функциям системы защиты турбины относится:
приём сигналов от датчиков параметров и состояния оборудования, уста-
новленных на турбине, обработка сигналов по заданному технологическому ал-
горитму;
формирование управляющих воздействий защиты на исполнительные ор-
ганы;
диагностика состояния элементов и узлов защиты;
передача информации оператору о времени и порядке срабатывания за-
щит;
формирование сигналов об отключении турбины (закрытии стопорных
клапанов) и передача их в систему управления блока.
Автоматическое отключение турбины производится при возникновении
следующих аварийных ситуаций, обусловленных состоянием собственно тур-
бины:
недопустимым повышением скорости вращения ротора;
недопустимым осевом перемещении ротора;
падении давления масла на смазку подшипников;
повышении давления в конденсаторе турбины;
недопустимым повышении вибрации подшипников турбоагрегата;
повышении давления пара за цилиндром высокого давления;
повышении температуры пара на выхлопе цилиндров низкого давления;
повышении уровня в сепаратосборнике сепаратора-пароперегревателя.
69
Назначение системы контроля и регулирования турбины (СКРТ):
управление подачей пара в турбину с целью поддержания заданной час-
тоты вращения, мощности и/или других параметров, определяемых режимом
работы турбоагрегата;
автоматическая стабилизация на заданном уровне режимных параметров
турбоустановки.
В состав СКРТ входят:
система регулирования, в том числе электронная часть системы регули-
рования (ЭЧСР);
система виброконтроля и вибродиагностики (СВД).
К задачам, решаемым СВД, относятся:
контроль _______вибрации опор и относительной вибрации ротора, передача ин-
формации об уровнях вибрации в АСУ ТП;
сигнализация превышения допустимых пороговых значений вибрации;
формирование по заданному алгоритму обобщенных сигналов об аварий-
ных уровнях вибрации для передачи их в систему защиты;
выполнение спектрального анализа вибрации (преобразование Фурье),
корреляционного анализа вибрации и режимных параметров, реализация алго-
ритмов диагностирования;
накопление и создание архива данных, характеризующих вибрационное
состояние турбоагрегата.__
10) СКУ ЭО - предназначена для контроля и управления аппаратурой "собственных нужд" (энергоснабжение). СКУ ЭО относится к уровню низовой автоматики, а по влиянию на безопасность – к системам безопасности.
Фу н к ц и и С КУ Э Ч . Система предназначена для контроля и управ-
ления электрооборудованием АЭС в режимах нормальной эксплуатации, в экс-
плуатационных переходных режимах, при нарушениях нормальной эксплуата-
ции, включая аварии.
В состав электрической части энергоблока входит:
электрооборудование турбогенераторной установки;
главная схема электрических соединений (электрооборудование, необхо-
димое для передачи электроэнергии от генератора в энергосистему);
система электроснабжения собственных нужд (СН) энергоблока.
Электрооборудование турбогенераторной установки по отношению к
безопасности классифицируется по классу 4Н.
Система электроснабжения собственных нужд энергоблока на примере
АЭС с РУ В-320 приведена на рис. 2.8 [10].
В состав системы электроснабжения собственных нужд энергоблока вхо-
дят следующие секции:
ВА, ВВ, ВС, BD - секции 6 кВ нормальной эксплуатации 3-й категории
надежности, допускают длительное обесточивание;
BV, BW, ВХ - секции 6 кВ надежного Питания нормальной эксплуатации
2-й категории надежности, допускают кратковременное обесточивание на вре-
мя запуска дизель-генераторов; число секций соответствует числу каналов сис-
тем безопасности энергоблока [5];
70
CV01, CV02, CW01 — секции 0,4 кВ аварийного электропитания 2-й ка-
тегории надежности, допускают кратковременное обесточивание на время за-
пуска дизель-генераторов;
ЕЕО1 — ЕЕ03 — секции 220 В 1-й категории надежности, не допускают
перерыва электроснабжения потребителей;
ЕК01 — ЕМ03 — секции 0,4 кВ 1-й категории надежности, не допускают
перерыва электроснабжения потребителей.
При работе энергоблока в режиме выдачи мощности система получает
электропитание от рабочих трансформаторов собственных нужд (РТСН) от
турбогенератора, а в остальных эксплуатационных режимах от энергосистемы
через блочный трансформатор.
Предусмотрена возможность питания потребителей системы от резерв-
ных трансформаторов СН, подключенных к внешней, независимой сети элек-
тропередач.
Система аварийного электропитания является обеспечивающей системой
безопасности и классифицируется по отношению к безопасности по 2-му клас-
су. В эксплуатаци-__онных режимах работы система получает питание от турбогенератора или от
внешних источников электроснабжения.
При одновременной потере электроснабжения от внешних источников и
турбогенератора (обесточивание станции) система обеспечивает надежное вы-
полнение функций безопасности при питании от внутренних, независимых ис-
точников переменного тока.
Аккумуляторные батареи, поддерживающие работу систем, важных для
безопасности, обеспечивают их работу в течение, по меньшей мере, двух часов
при любых обстоятельствах.
Системы и компоненты СКУ ЭЧ, обеспечивающие мониторинг и управ-
ление безопасным остановом энергоблока с БПУ (РПУ) и не отнесенные к бо-
лее высокому классу безопасности, классифицируются по отношению к безо-
пасности по 3-му классу.
11) АСХК – автоматизированная система химического контроля - предназначена для измерения химических показателей воднохимического режима 1-го и 2-го контуров энергоблока и для информационной поддержки персонала химцеха при решении задач контроля, диагностирования и управления ВХР. Система АСХК относится к уровню низовой автоматики, а по влиянию на безопасность–к системам нормальной эксплуатации, важным для безопасности.
СКУ ВХР предназначена для обеспечения с заданной и/или контролируе-
мой надежностью контроля за работой технологических систем и оборудова-
ния, которые:
непосредственно обеспечивают поддержание проектного водно-
химического режима 1-го и 2-го контуров энергоблока;
обеспечивают подготовку воды первичного заполнения и подпитку ос-
новных контуров, включая ввод корректирующих реагентов;
не являются средствами поддержания ВХР, но неполадки в их работе мо-
гут влиять на параметры качества теплоносителя.
СКУ ВХР в составе АСУ ТП АЭС в общем случае обеспечивает реализа-
цию следующих функций:
формирование первичной информации (данные анализа on line, off line,
теплотехнического контроля, состояния и режимов работы оборудования,
влияющего на ВХР основных и вспомогательных контуров);
информационная поддержка оперативного персонала по задачам иденти-
фикации текущего состояния и диагностики причин аномалий ВХР;
обобщение опыта эксплуатации технологического объекта управления;
информационная поддержка задач учета и анализа технико-
экономических показателей и задач подготовки производства.__
12) САРП – система аварийной регистрации параметров - предназначена для сбора и хранения истории изменения важных параметров энергоблока в предаварийный, аварийный и послеаварийный периоды.
Фун к ц и и с и с т емы р е г и с т р а ц и и в ажных п а р аме т р о в э к с -
п л у а т а ц и и . По отношению к безопасности система относится к классу 4Н.
Система выполняет дополнительные функции по информационному обеспече-
нию: оперативного персонала и предназначена для сбора, обработки и регист-
рации аналоговой и дискретной информации о работе энергоблока в режимах
нормальной эксплуатации, нарушениях нормальной эксплуатации, включая
аварии, с требуемой частотой опроса датчиков.
Объектами контроля и регистрации являются технологическое оборудо-
вание и параметры режима работы (состояния) энергоблока.
Система контролирует и регистрирует:
текущие значения параметров режима работы (состояния) энергоблока;
положение регулирующих органов;
состояние исполнительных механизмов;
изменение состояния индивидуальных средств дистанционного управле-
ния за БПУ и РПУ;
сигналы срабатывания УСБ.
Отображение информации оперативному персоналу осуществляется по
запросу персонала.
Итак, на рис. 1.13-1.14 показана структурная схема АСУТП АЭС. Она состоит из локальных систем управления нормальной эксплуатации и локальных систем безопасности, объединенных в единое информационно-управляющее пространство с помощью информационно-вычислительной системы. Такое объединение выполняется с целью централизации функций контроля и управления энергоблоком на панелях БЩУ/РЩУ. Для того, чтобы понять, как организовано управление энергоблоком на нижнем уровне, рассмотрим структуру простейшей локальной системы управления нормальной эксплуатации (рис. 1.15). Для работы такой системы управления необходимо правильное измерение сигналов от локальных объектов автоматизации, обработка измеренной информации, переключение режимов работы, выработка управляющего воздействия на исполнительные механизмы и защитные функции. Все перечисленные функции выполняют нижние уровни АСУТП – уровень низовой автоматики и уровень связи с ТОУ. Уровень связи с объектом, который состоит из датчиков, исполнительных, пусковых устройств и согласующей аппаратуры обеспечивает измерения параметров технологических процессов, контроль состояния оборудования (исправно-неисправно), определение достоверности измеренных сигналов, отработку команд управления, защит и блокировок, реализует функции сигнализации. Уровень низовой автоматики реализует интеллектуальные функции по обработке данных и организации управления. Рассмотрим совместную работу двух перечисленных уровней без отнесения к конкретной системе автоматизации.
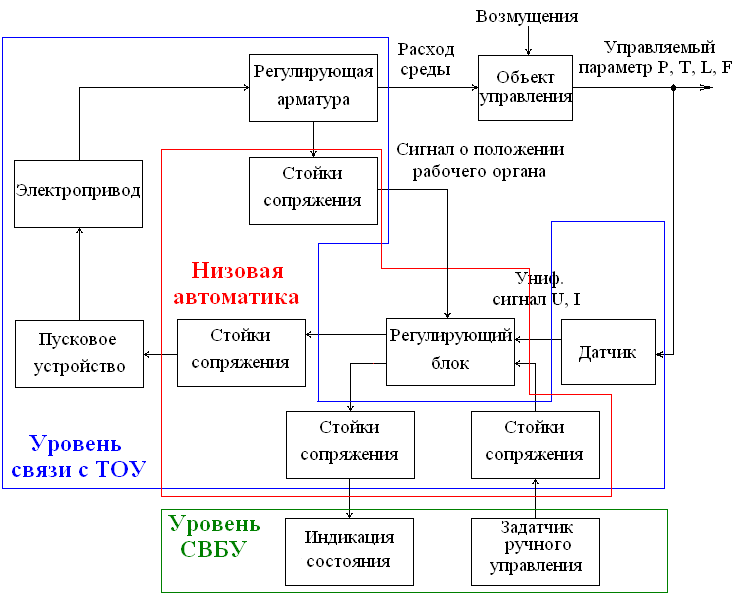
Рис. 1.15 Структура простейшей локальной системы автоматизации АЭС
Функции программно-технических комплексов. ПТС нижнего уровня
обеспечивают построение ПТК, выполняющих следующие функции:
ввод и обработка информации, необходимой для реализации автоматиче-
ского контроля и управления, и передачи данных на верхний уровень АСУТП;
контроль и сигнализация;
автоматизированное управление;
автоматическое управление;
автоматическое регулирование;
контроль работоспособности, диагностики и реконфигурации
ПТС;
обмен данными между подсистемами АСУ ТП.
Ф у н к ц и и в в о д а и п е р в и ч н о й о б р а б о т к и и н ф о р м а -
ц и и :
1. Ввод информации от датчиков.
2. Формирование стандартного сообщения о величине измеряемого
сигнала, сопровождаемое признаками достоверности, времени измерения.
3. Автоматический контроль и диагностика измерительных каналов,
включая датчики и линии связи с ними.
4. Контроль достоверности принимаемой информации.
5. Присвоение измеряемому значению параметра метки времени.
6. Вычисление косвенно измеряемых параметров.
7. Размножение измерительной информации.
8. Формирование локальной базы данных.
Ф у н к ц и и к о н т р о л я и с и г н а л и з а ц и и :
1. Сравнение текущих значений параметров с заданными значениями
предупредительных и аварийных уставок
2. Формирование и выдача сообщений о выходе текущего значения
или скорости изменения параметра за пределы соответствующих уставок.
3. Программное изменение величин уставок.
Ф у н к ц и и а в т о м а т и ч е с к о г о у п р а в л е н и я :
1. Реализация алгоритмов технологических защит и блокировок, на-
правленных на сохранение технологического оборудования от повреждений
при выходе технологического процесса за пределы режима нормальной экс-
плуатации.
2. Реализация алгоритмов программно-логического управления.
3. Фиксация времени начала действий защит и блокировок.
4. Формирование диагностических сообщений о нарушениях в дейст-
виях защит и блокировок.
5. Реализация алгоритмов запрета на несанкционированное отключе-
ние защит и блокировок.
6. Регистрация аварийных событий.
140
Ф у н к ц и и а в т о м а т и з и р о в а н н о г о у п р а в л е н и я :
1. Ввод сигналов от средств управления блочного и резервного пунк-
тов управления.
2. Контроль достоверности сигналов управления.
3. Формирование и выдача дискретных сигналов управления исполни-
тельными механизмами.
Ф у н к ц и и а в т о м а т и ч е с к о г о р е г у л и р о в а н и я :
1. Контроль состояния контура регулирования.
2. Контроль положения регулирующих органов.
3. Программное задание уставки регулируемой величины.
4. Дистанционное задание уставки регулируемой величины.
5. Программное изменение структуры и закона регулирования конту-
ра регулирования в соответствии с требуемым режимом работы.
6. Формирование управляющих воздействий.
7. Блокировка управляющих воздействий при отказах регулирующих
исполнительных механизмов.
8. Вывод сообщений об отказах регулирующих исполнительных ме-
ханизмов с соответствующими метками времени.
Ф у н к ц и и к о н т р о л я р а б о т о с п о с о б н о с т и , д и а г н о с т и -
к и и р е к о н ф и г у р а ц и и :
1. Контроль работоспособности технических средств ПТК, включая
датчики, исполнительные механизмы и линии связи с ними.
2. Контроль электропитания и температурного режима технических
средств ПТК.
3. Диагностика отказов ПТС с точностью до сменного модуля.
4. Ввод (вывод) резерва и реконфигурация ПТС.
5. Выдача сообщений о техническом состоянии (отказах, деградации
ПТК и т.д.) на блочный (станционный) уровень управления АСУ ТП АЭС.
Ф у н к ц и и о б м е н а д а н н ы м и с а б о н е н т а м и л о к а л ь н о й
с е т и :
1. Формирование запроса на обмен данными.
2. Прием запроса на обмен данными.
3. Формирование буфера данных.
4. Прием запрашиваемых данных.
5. Контроль процедуры обмена и формирование признаков достовер-
ности обмена.
6. Формирование признаков завершения обмена.__
1) Измерение параметров ТОУ включает в себя: измерение аналоговых сигналов (теплотехнических, химических, нейтронно-физических, радиационных, вибрационных и т.д.), контроль достоверности измеренных аналоговых сигналов, контроль дискретных параметров исполнительных механизмов и состояния объектов управления. Т.е. на данной стадии выполняется одна основная операция – измерение аналоговых сигналов (P, T, L, F и т.д.), и три вспомогательные – контроль достоверности сигналов датчиков, контроль состояния исполнительных механизмов и контроль состояния объектов управления. В процессе измерения осуществляется преобразование измеряемого физического параметра (давления, уровня и т.д.) в унифицированный электрический сигнал – ток 0-5 мА, 4-20 мА или напряжение 0-5 В, 0-10 В (рис. 1.15). После получения электрического сигнала проверяется его достоверность (т.е. то, насколько правильно этот сигнал отражает реальный процесс). Определение достоверности аналогового сигнала производится по следующим критериям: выход параметра за установленные границы; сравнение значений сигналов, полученных от нескольких однотипных датчиков, находящихся в одинаковых условиях; наличие отказа в элементах канала измерения/контроля (в том числе - обрыва и короткого замыкания). Например, если выходной сигнал датчика лежит в диапазоне 4-20 мА, а система управления измерила сигнал величиной 0 мА, то это явно свидетельствует о неисправности или обрыве линии связи. Еще один пример: если измерение производится тремя датчиками и у двух из них выходной сигнал равен 10 мА, а у третьего - 2 мА, то можно сказать, что последний датчик неисправен и его показания учитывать нельзя. После присвоения метки «достоверен/недостоверен» аналоговому сигналу, происходит определение состояния исполнительных механизмов – открыта или закрыта арматура, включен или выключен насос, в рабочем или резервном состоянии находится электродвигатель и т.д. Определение достоверности дискретной информации (т.е. включен-выключен) производится по следующим критериям: недопустимое сочетание дискретных сигналов (например, от двух датчиков концевых выключателей одной арматуры), наличие отказа в элементах канала контроля. Контроль состояния объекта управления производится посредством сравнения измеренного достоверного аналогового сигнала с некоторой уставкой. Если сигнал превышает уставку, то это свидетельствует об отклонении от нормального режима, включаются необходимые защиты и блокировки, формируются сигнализационные сообщения для оперативного персонала и т.д. На этой стадии задействуется и уровень связи с ТОУ, и уровень низовой автоматики. Причем может наблюдаться взаимное проникновение перечисленных уровней, поскольку стойки сопряжения в одних случаях относят к уровню низовой автоматики (например, стойки промреле и кроссовые стойки ТПТС), а в других – к уровню связи с ТОУ (например, стойки РТЗО и КРУЗА).
5.2.4 Обработка информации о состоянии ТОУ
5.2.4.1 Обработка информации включает в себя:
— первичную обработку информации;
— идентификацию аномалий и нарушений в технологических процессах и оборудовании;
— вычисление неизмеряемьхх/неконтролируемых параметров;
— контроль достоверности информации;
— привязка значения контролируемого параметра к времени.
2) Обработка информации о состоянии ТОУ включает в себя первичную обработку информации, которая направлена на получение сигнала нужного качества и нужной формы. На этом этапе производится линеаризация статической характеристики датчика, усиление, фильтрация, перевод измеренного электрического сигнала в физическую величину (для цифрового кода), кодирование данных (если датчик имеет цифровой выход). Например, для термопар производится компенсация температуры холодного спая, для уровнемеров - линеаризация статической характеристики, а для датчиков давления оценивается влияние температуры окружающей среды на точность измерения давления. На этой стадии используется как уровень связи с ТОУ, так и низовая автоматика.
3) После измерения аналоговых сигналов, определения их достоверности и проверки состояния оборудования, необходимо организовать целенаправленное воздействие на объекты управления, которое стабилизирует технологические параметры в заданном состоянии. Возможны следующие типы управления:
В задачи автоматического управления входит:
автоматическое регулирование;
программно-логическое управление;
технологические защиты и блокировки;
аварийные и предупредительные защиты.
Автоматическое регулирование предназначено для поддержания техно-
логических параметров (мощности реактора, уровня теплоносителя и давления
в КД, уровня в ПГ, давления пара перед турбиной, напряжения генератора и
др.) в заданном диапазоне и с требуемым качеством.
Программно-логическое управление (функционально-групповое управ-
ление) обеспечивает образование последовательности управляющих команд в
соответствии с технологическим алгоритмом управления исполнительным ме-
ханизмом и/или технологической системой энергоблока.
Технологические защиты предназначены для выполнения защитных
функций и операций по управлению технологическим оборудованием с целью
исключения его повреждения, защиты персонала и предотвращения аварии при
обнаружении аварийной ситуации.
Технологические блокировки предназначены для предотвращения по-
вреждения оборудования и/или поддержания технологического режима. Дейст-
вие блокировок должно приводить к отключению/включению отдельных агре-
гатов и механизмов, выполнению локальных операций, предотвращению сни-
жения нагрузки либо развитию аварийной ситуации.
Аварийные и предупредительные защиты предназначены для выполнения
защитных функций системой безопасности, разгрузку и ограничение мощности
реактора при нарушении нормальной эксплуатации энергоблока.
При выполнении функций автоматизированного управления обеспечива-
ется управление ИМ с помощью индивидуальных органов управления и
средств дисплейного пульта блочного пункта управления.
К управляющим функциям относятся: 1) дистанционное управление оборудованием оператором с пультов и панелей управления; 2) автоматическое управление; 3) автоматическое регулирование.
Дистанционное управление включает в себя:
1) индивидуальное управление исполнительными механизмами (запорной, соленоидной и регулирующей арматурой; электродвигателями насосов) или их группами и коммутационными аппаратами с панелей-пультов БПУ,РПУ,МЩУ;
2) задание оператором режима работы резервированных агрегатов (выбор основного, резервного насосного агрегатов, ввод/вывод АВР (если не предусмотрено управление АВР автоматикой более высокого уровня);
3) ввод/вывод отключаемых блокировок (программ управления);
4) ввод/вывод (санкционированный) технологических защит накладками (если таковые предусмотрены проектом);
5) изменение режимов работы регуляторов (если не предусмотрено управление от логических алгоритмов, а также по усмотрению оператора)
6) дублирование действий технологических защит и блокировок при отказе соответствующих функций;
7) изменение заданного значения регулятора оператором;
При подаче команды «открыть» («закрыть») алгоритм управления запорной арматуры должен сохранять выходную команду до ее полного выполнения или поступления команды «стоп» или команды противоположенного направления. Должна быть предусмотрена возможность останова запорной арматуры. Поступление во время хода запорной арматуры команды от технологических защит или блокировок в направлении, противоположенном ее ходу, должно вызвать останов запорной арматуры и реверс электродвигателя;
4.2.2.3 Должна быть предусмотрена диагностика и стандартная
сигнализация обо всех характерных нарушениях нормальной
работоспособности запорной арматуры (двигателя): отключении
питания исполнительного механизма, превышении времени хода
запорной арматуры, несоответствии ее (его) состояния или других
причин. Объем диагностики по запорной арматуре (двигателю)
определяется на стадии «Проектирование»;
4.2.2.4 При управлении регулирующими клапанами оператор должен
иметь возможность включения и отключения регулятора, изменения
заданного значения, принудительного открытия или закрытия
регулирующего органа, при отсутствии сигналов технологических
защит и блокировок, запрещающих открытие или закрытие
регулирующего органа;
4.2.2.5 Алгоритм управления регулирующем клапаном отличается от
алгоритма управления задвижкой тем, что команда «открыть»
(«закрыть») на выходе должна существовать только во время
существования соответствующей команды дистанционного или
автоматического управления на входе. Команда должна сохраняться
до полного открытия (закрытия) клапана только при действии
технологических защит и блокировок и при условии наличия
соответствующего инициирующего сигнала;
4.2.2.6 Должна быть предусмотрена диагностика и стандартная
сигнализация обо всех характерных нарушениях нормальной
работоспособности регулирующего клапана: отключении питания
исполнительного механизма, превышении времени хода
регулирующего клапана, несоответствии его состояния или других
причин. Объем диагностики по регулирующему клапану
определяется на стадии «Проектирование»;
4.2.2.7 Регулирующие клапаны совместно с исполнительным
механизмом должны в пределах всего регулировочного диапазона
иметь рабочие характеристики близкие к линейным (различающиеся
по крутизне во всех точках не более чем в 1,5 раза) и не иметь
люфтов, превышающих 2 % полного хода. Пропуск регулирующих
клапанов в закрытом положении не должен превышать 5-10 %
максимального расхода;
4.2.2.8 Должно быть предусмотрено наличие специальной
диагностической аппаратуры для контроля удовлетворительного
состояния арматуры и приводов с целью обоснования их
эксплуатации, либо необходимости проведения ремонта. Аппаратура
должна определять наличие износа или старения арматуры и
привода, чтобы произвести оценку остаточного ресурса их или их
узлов. Она также должна позволять определять дефекты с целью
планирования проведения определенного вида ремонта;
4.2.2.9 Ламповая сигнализация состояния исполнительных механизмов и
выключателей систем нормальной эксплуатации должна
обеспечивать индикацию:
для запорной арматуры с электродвигательным приводом, управляемой
с БПУ, РПУ:
Состояния «открыто»;
Состояния «закрыто»;
Хода в направлении открытия (мигание);
Хода в направлении закрытия (мигание);
Промежуточного положения;
Неисправности;
для регулирующих клапанов:
Режима работы «автоматический»;
Режима работы «дистанционный»;
Режима работы «стерегущий» (режим работы
«автоматический» при наличии запрета на открытие/закрытие РК);
Команд от регулятора «Больше» и «Меньше__________»;
Неисправности;
Степени открытия регулирующего клапана по индикатору
положения;
для механизмов:
Состояния «отключено»;
Состояния «включено»;
Неисправности;
Требования к автоматическому управлению.
4.2.2.10 К автоматическому управлению относятся:
блокировки технологического оборудования, управление
которым реализовано в СКУ РО;
технологические защиты СКУ РО, влияющие на работу
энергоблока.
а) индивидуальное управление – выполняется при управлении относительно простыми объектами, для стабилизации параметров которых достаточно одного исполнительного механизма – одного насоса, электродвигателя, арматуры. Т.е. регулятор воздействует на объект управления всегда через один исполнительный механизм. Этот вид управления может быть реализован как по командам операторов БЩУ – в этом случае говорят, что регулятор работает в ручном режиме, так и в автоматическом режиме, когда система управления работает по замкнутому контуру без участия человека. Выбор режима работы регулятора производится с панелей управления БЩУ. Предположим, управление объектом осуществляется с помощью регулирующей арматуры. Для стабилизации управляемого параметра, например, уровня жидкости в баке, необходимо управлять расходом жидкости через проходное сечение арматуры. Предположим, система управления работает в автоматическом режиме и оператор БЩУ только наблюдает за ходом управления. Если уровень жидкости будет меньше заданного, то регулятор, вычислив сигнал ошибки и проверив достоверность сигнала уровнемера, сформирует команду на открытие арматуры. При этом проходное сечение арматуры начнет увеличиваться, приток жидкости в бак начнет расти, что приведет к возрастанию уровня жидкости. В данном случае, регулятор также должен контролировать текущее положение арматуры, так как она уже может быть либо полностью открыта, либо полностью закрыта, а управляющая команда до сих пор подается. Такая ситуация может привести к поломке арматуры, так как электродвигатель работает на износ (рабочий орган арматуры уперся в трубопровод, а двигатель все равно пытается его сдвинуть) и потребляет очень большой ток. Для фиксации таких «аварийных» ситуаций в регулирующий блок заводится информация о текущем положении исполнительного механизма. Как только уровень жидкости станет равным уставке, регулятор прекратит воздействие на исполнительный механизм и будет ждать дальнейших указаний;
б) функционально-групповое управление – выполняется при управлении более сложными объектами, для стабилизации параметров которых необходимо несколько исполнительных механизмов. При этом управляющий сигнал преобразуется регулятором в последовательность дискретных команд, которые переводят все исполнительные механизмы в заданное состояние. Т.е. выполняется логическое (пошаговое) управление, когда следующий шаг управления не может быть выполнен пока не завершится предыдущий. Например, управление объектом осуществляется с помощью трех регулирующих арматур – А1, А2 и А3. Для стабилизации управляемого параметра, например, давления, на заданном уровне необходимо сначала полностью открыть арматуру А1, затем полностью закрыть арматуру А2 и в конце – открыть арматуру А3. Таким образом, регулятор, получив управляющий сигнал либо от оператора БЩУ (ручной режим), либо от контура обратной связи (автоматический режим), сначала дает команду открыть арматуру А1. Анализируя сигналы от датчиков положения арматуры А1, регулятор определяет ее текущее положение и если она находится в полностью открытом-закрытом состоянии, то формирует необходимые визуальные сигналы на панелях БЩУ/МЩУ. Как только арматура А1 будет полностью открыта, сработает концевой выключатель открытия, регулятор выдаст команду на закрытие арматуры А2 и точно так же будет оценивать ее текущее положение. Как только арматура А2 будет закрыта, регулятор сформирует последнюю команду пошагового управления - на открытие арматуры А3;
Программно-логическое (шаговое) управление при автоматизации
АЭС. В основе шагового управления — логические автоматы, функциони-
рующие в соответствии с заданным технологическим алгоритмом. Процесс
управления осуществляется путем отработки заданной последовательности
шагов, на каждом из которых выдаются команды управления и проверяются
технологические условия, определяющие возможность перехода к следующе-
му шагу [19].
Оперативному персоналу выдается информация об отработке каждого
очередного шага программы с указанием о необходимости выполнения руч-
ных операций.
Алгоритмы защит и блокировок, предусмотренные проектом, в алгорит-
мах логического управления не реализуются.
Логические операторы, составляющие алгоритм управления технологиче-
ским процессом, классифицируются следующим образом [20]:
каждый предыдущий оператор уi-1 является источником входного управ-
ляющего сигнала оператора уi
каждый оператор уi, yj+1, yg может являться источником входного управ-
ляющего сигнала для внешних алгоритмов управления;
результат выполнения каждого шага является источником информации
для человека-оператора о ходе выполнения шаговой программы;
каждая шаговая программа имеет входные управляющие сигналы "Пуск"
и "Стоп", формируемые человеком-оператором и/или внешними логическими
программами.
Типовая структура шаговой программы приведена на рис. 5.4.
в) автоматическое управление – является составной частью индивидуального и группового управления и, кроме того, выполняется при срабатывании защит-блокировок оборудования. Например, если регулятор воздействует на арматуру, стремясь перевести ее в открытое состояние, но при этом она уже находится в крайнем открытом положении, то сработает концевой выключатель открытия (токовое реле или моментная муфта) и заблокирует дальнейшее воздействие на исполнительный механизм. Защитные схемы регуляторов останавливают работу системы управления, если параметры объекта управления находятся в недопустимых пределах. В этих случаях происходит немедленное оповещение оперативного персонала станции либо визуальными, либо звуковыми сигналами. Таким образом, автоматическое управление, в большей степени, относится к защитам и блокировкам оборудования. Оператор, в этом случае, выступает в роли наблюдателя. Если действие системы автоматизации не относится ни к защитам, ни к блокировкам, а характеризуется, как воздействие на процессы нормальной эксплуатации, то все важные решения по управлению принимает и реализует человек-оператор.
Рассмотрим пример: система автоматизации, посредством воздействия на регулирующую арматуру А и арматуру Б, управляет уровнем жидкости в теплообменнике. Для плавного управления используется только арматура А, для компенсации более резких изменений уровня используются обе арматуры. Если любая из арматур работает на открытие, то приток жидкости в теплообменник увеличивается и уровень повышается, и наоборот. Для измерения уровня используются два датчика с выходным токовым сигналом 4-20 мА: один датчик находится в рабочем состоянии, другой – в резерве. При этом, сигналу 4 мА соответствует минимальный уровень 0 м, а сигналу 20 мА – максимальный уровень 2 м. Будем считать, что текущий уровень в теплообменнике отклонился от заданного значения. Это отклонение моментально зафиксировал «рабочий» датчик и сформировал отклик в виде сигнала тока. Если токовый сигнал находится в диапазоне 4-20 мА, то микропроцессорная часть датчика присваивает ему метку «достоверен» и использует для дальнейшей обработки. Если же сигнал тока имеет величину вне указанного диапазона, например, 0 мА, то сигналу присваивается метка «недостоверен». Т.е. на данной стадии получен токовый сигнал о измеряемом уровне и признак его достоверности – вся эта информация передается для дальнейшей обработки регулятору. Помимо этого, существует некоторый предельный сигнал датчика, который характеризует критический уровень жидкости в теплообменнике. Например, сигнал 4 мА сообщает о том, что жидкости в теплообменнике нет. Если регулятор обнаруживает такой сигнал, то моментально включает защитные схемы и формирует сигнализационные сообщения для оперативного персонала. Итак, если сигнал датчика достоверен и не имеет критических отклонений, то регулятор вычисляет ошибку управления и воздействует на исполнительный механизм – регулирующую арматуру А. Здесь регулятор также должен учитывать текущее состояние арматуры – если арматура А уже полностью открыта (закрыта), то дальше ее открывать (закрывать) не получится и нужно перевести воздействие на арматуру Б. Эта информация передается в регулятор с помощью датчиков положения арматуры – концевых выключателей. Арматура оснащается двумя концевыми выключателями – выключатель открытия КВО и выключатель закрытия КВЗ. Как только регулирующий орган арматуры переходит в полностью открытое (закрытое) положение, замыкается контакт КВО (КВЗ), регулятор фиксирует этот состояние и делает вывод о дальнейших действиях – в нашем случае, при полностью открытой арматуре А, поступит команда на открытие арматуры Б. Такова последовательность действий при достоверном сигнале датчика. Если же сигналу датчика присвоена метка «недостоверен», то регулятор переводит основной датчик в режим «резерв», а резервный датчик - в режим «рабочий», формирует сообщения для обслуживающего персонала о выполненной замене и все стадии измерения-обработки-управления повторяются.