


Системы автоматизации атомных станций Энергоблок №2 Ростовской аэс
Конспект лекций
Практические занятия с использованием тренажера ТОС АСУТП-2
Для студентов ВИТИ НИЯУ МИФИ и работников-стажеров ЦТАИ РоАЭС
Разработал: инструктор ОПОП УТП РоАЭС
к.т.н., доцент кафедры «ИиУС» ВИТИ НИЯУ МИФИ Тямалов А.А.
Консультант: инструктор ОПОП УТП РоАЭС Лукьянов А.А.
Волгодонск 2011
Содержание
Предисловие……………………………………………………………………... |
… |
Введение для части 1...…………………………………………………………. |
… |
1. Общее описание АЭС и АСУТП..…………………………………………... |
… |
1.1 Основные физические понятия и классификация АЭС………………... |
… |
1.2 Системы нормальной эксплуатации АЭС с реактором ВВЭР-1000….. |
… |
1.3 Системы безопасности АЭС с реактором ВВЭР-1000..……………….. |
… |
1.4 Режимы работы АЭС и требования к АСУТП в этих режимах……….. |
… |
1.5 Основные объекты управления АЭС с реактором ВВЭР-1000.………. |
… |
1.6 Характеристика АЭС как объекта автоматизации……………………... |
… |
1.7 Структура, состав и функции АСУТП АЭС………………………….… |
… |
1.8 Теплотехнический контроль на АЭС………………………………….... |
… |
1.9 Монтаж датчиков и согласующие преобразователи АЭС…………….. |
… |
1.10 Силовые и исполнительные устройства АЭС....……………………… |
… |
1.11 Структура типовых систем управления АЭС…..……………………... |
… |
1.12 Режимы работы и контроль исправности регуляторов...…………...... |
… |
1.13 Защитные и сигнализационные функции систем управления……….. |
… |
Введение для части 2…………………………………………………………… |
… |
2. Аппаратно-программная реализация систем управления АЭС…………… |
… |
2.1 Программно-технические средства СВБУ……………………………… |
… |
2.2 Знакомство с интерфейсом ТОС АСУТП-2 и ИВС «Портал»…….…... |
… |
2.3 Состав управляющего комплекса ТПТС………………………………... |
… |
2.4 Виды и назначение функциональных модулей ТПТС…………………. |
… |
2.5 Введение в GET-программирование……………………………………. |
… |
2.6 Подключение дискретных датчиков к аппаратуре ТПТС……………... |
… |
2.7 GET-планы приема и обработки сигналов дискретных датчиков……. |
… |
2.8 Подключение аналоговых датчиков к аппаратуре ТПТС……………... |
… |
2.9 GET-планы приема и обработки сигналов аналоговых датчиков…….. |
… |
2.10 Подключение датчиков температуры к аппаратуре ТПТС..…………. |
… |
2.11 GET-планы приема и обработки сигналов от датчиков температуры. |
… |
2.12 Программно-технические средства КТПС-ПН……………………….. |
… |
2.13 Подключение запорной арматуры к аппаратуре КТПС-ПН…………. |
… |
2.14 Управление запорной арматурой с помощью модулей КТПС-ПН….. |
… |
2.15 Подключение запорной арматуры к аппаратуре ТПТС……………… |
… |
2.16 GET-планы по управлению запорной арматурой…………………….. |
… |
2.17 Подключение насосов к аппаратуре КТПС-ПН………………………. |
… |
2.18 Управление насосами с помощью модулей КТПС-ПН………………. |
… |
2.19 Подключение насосов к аппаратуре ТПТС…………………………… |
… |
2.20 GET-планы по управлению насосами…………………………………. |
… |
2.21 Подключение регулирующей арматуры к аппаратуре КТПС-ПН…... |
… |
2.22 Управление регулирующей арматурой с помощью КТПС-ПН……… |
… |
2.23 Подключение регулирующей арматуры к аппаратуре ТПТС……….. |
… |
2.24 GET-планы по управлению регулирующей арматурой………………. |
… |
2.25 Реализация пошагового управления с помощью КТПС-ПН…………. |
… |
2.26 Алгоритмы пошагового управления на аппаратуре КТПС-ПН……… |
… |
2.27 Реализация пошагового управления с помощью ТПТС……………… |
… |
2.28 GET-планы пошагового управления…………………………………... |
… |
2.29 Автоматический ввод резерва и сигнализация………………………... |
… |
2.30 Ввод резерва и сигнализация на аппаратуре КТПС-ПН……………... |
… |
2.31 GET-планы автоматического ввода резерва и сигнализации………... |
… |
2.32 Организация промышленных сетей на основе стоек КТПС-ПН…….. |
… |
2.33 Шины, сетевое и вспомогательное оборудование ТПТС…………….. |
… |
Введение для части 3…………………………………………………………… |
… |
3. Реализация локальных регуляторов РО с помощью ТПТС……………….. |
… |
3.1 Регуляторы давления в 1-ом контуре – YPC01,YPC05………………... |
… |
3.2 Практикум по регуляторам YPC01, YPC05 на ТОС АСУТП-2……….. |
… |
3.3 Регуляторы уровня в компенсаторе давления – YPC02, YPC03……… |
… |
3.4 Практикум по регуляторам YPC02, YPC03 на ТОС АСУТП-2……….. |
… |
3.5 Регулятор разности температур – YPC04…………………………......... |
… |
3.6 Практикум по регулятору YPC04 на ТОС АСУТП-2………………….. |
… |
Введение для части 4…………………………………………………………… |
… |
4. Реализация локальных регуляторов ТО с помощью ТПТС……………….. |
… |
4.1 Регулятор уровня в конденсаторе ТПН-1 – RW51C01….……………... |
… |
4.2 Практикум по регулятору RW51C01 на ТОС АСУТП-2………………. |
… |
4.3 Регулятор давления конденсата на уплотнения ТПН-1 – RF21C02…... |
… |
4.4 Практикум по регулятору RF21C02 на ТОС АСУТП-2……………….. |
… |
4.5 Регулятор температуры масла за маслоохладителем – VC41C01…….. |
… |
4.6 Практикум по регулятору VC41C01 на ТОС АСУТП-2……………….. |
… |
Введение для части 5…………………………………………………………… |
… |
5. Системы автоматизации реакторного отделения РоАЭС…………………. |
… |
5.1 Реактор и главный циркуляционный контур – YA..…………………… |
… |
5.2 Практикум по системе YA на ТОС АСУТП-2…………………………. |
… |
5.3 Система компенсации давления – YP...………………………………… |
… |
5.4 Практикум по системе YP на ТОС АСУТП-2………………………….. |
… |
5.5 Пассивная часть САОЗ - YT……………………………………………... |
… |
5.6 Практикум по системе YT на ТОС АСУТП-2………………………….. |
… |
5.7 Система аварийно-планового расхолаживания – TQ12,22,32………… |
… |
5.8 Практикум по системе TQ12,22,32 на ТОС АСУТП-2………………… |
… |
5.9 Спринклерная система – TQ11,21,31..………………………………….. |
… |
5.10 Практикум по системе TQ11,21,31 на ТОС АСУТП-2……………….. |
… |
5.11 Система аварийного ввода бора – TQ13,23,33..………………………. |
… |
5.12 Практикум по системе TQ13,23,33 на ТОС АСУТП-2……………….. |
… |
5.13 Система аварийного впрыска бора – TQ14,24,34..……………………. |
… |
5.14 Практикум по системе TQ14,24,34 на ТОС АСУТП-2……………….. |
… |
5.15 Система аварийного паро-газоудаления – YR..………………………. |
… |
5.16 Практикум по системе YR на ТОС АСУТП-2………………………… |
… |
5.17 Система аварийной питательной воды – TX10,20,30………………… |
… |
5.18 Практикум по системе TX10,20,30 на ТОС АСУТП-2……………….. |
… |
5.19 Система техводы ответственных потребителей – VF………………… |
… |
5.20 Практикум по системе VF на ТОС АСУТП-2………………………… |
… |
5.21 Система маслоснабжения ГЦН – YD………………………………….. |
… |
5.22 Практикум по системе YD на ТОС АСУТП-2………………………... |
… |
5.23 Система продувки парогенераторов – RY…………………………….. |
… |
5.24 Практикум по системе RY на ТОС АСУТП-2………………………… |
… |
5.25 Система организованных протечек – TY……………………………… |
… |
5.26 Практикум по системе TY на ТОС АСУТП-2………………………… |
… |
5.27 Система продувки-подпитки первого контура – TK..………………... |
… |
5.28 Практикум по системе TK на ТОС АСУТП-2………………………… |
… |
Введение для части 6…………………………………………………………… |
… |
6. Системы автоматизации турбинного отделения РоАЭС………………….. |
… |
6.1 Система главных паропроводов – RA…………………………………... |
… |
6.2 Практикум по системе RA на ТОС АСУТП-2………………………….. |
… |
6.3 Система промежуточного перегрева пара – RB………………………... |
… |
6.4 Практикум по системе RB на ТОС АСУТП-2………………………….. |
… |
6.5 Система сброса пара в конденсаторы – RC…………………………….. |
… |
6.6 Практикум по системе RC на ТОС АСУТП-2………………………….. |
… |
6.7 Система сепарации и конденсата греющего пара – RB,RN…………… |
… |
6.8 Практикум по системе RB,RN на ТОС АСУТП-2……………………... |
… |
6.9 Система вакуумного турбоагрегата – SD………………………………. |
… |
6.10 Практикум по системе SD на ТОС АСУТП-2………………………… |
… |
6.11 Система основного конденсата – RM…………………………………. |
… |
6.12 Практикум по системе RM на ТОС АСУТП-2………………………... |
… |
6.13 Система подачи пара на эжектора и уплотнения – SG……………….. |
… |
6.14 Практикум по системе SG на ТОС АСУТП-2……………………….... |
… |
6.15 Система регенерации низкого давления – RH,RN……………………. |
… |
6.16 Практикум по системе RH,RN на ТОС АСУТП-2……………………. |
… |
6.17 Система питательной воды – RL………………………………………. |
… |
6.18 Практикум по системе RL на ТОС АСУТП-2……………………….... |
… |
6.19 Система регенерации высокого давления – RD,RN..…………………. |
… |
6.20 Практикум по системе RD,RN на ТОС АСУТП-2……………………. |
… |
6.21 Система циркуляционной воды – VC………………………………….. |
… |
6.22 Практикум по системе VC на ТОС АСУТП-2……………………….... |
… |
6.23 Система паропроводов собственных нужд и расхолаживания – RQ... |
… |
6.24 Практикум по системе RQ на ТОС АСУТП-2……………………….... |
… |
Заключение……………………………...………………………………………. |
… |
Список литературы…………………...……………………………………........ |
… |
Введение для части 1
Основной задачей тепловой или атомной электростанции является производство электроэнергии. В атомных станциях электроэнергия вырабатывается не за счет сгорания органического топлива (уголь, мазут, газ) как на ТЭС, а за счет реакции деления ядер урана, происходящей в ядерном реакторе. И хотя назначение этих типов электростанций одинаково, АЭС по сравнению с ТЭС обладают рядом преимуществ: 1) себестоимость выработанной на АЭС электроэнергии ниже, чем на ТЭС, т.к. меньше расход топлива; 2) увеличение доли АЭС в энергетическом балансе страны позволит использовать органическое топливо в качестве сырья для других отраслей промышленности; 3) высокая экологическая чистота производства электроэнергии, т.к. на АЭС нет выбросов в атмосферу вредных веществ, содержащихся в золовой пыли ТЭС; 4) высокая мощность на один энергоблок (до 1600 МВт). Между тем, АЭС не лишены недостатков: 1) высокие требования к безопасности АЭС, обусловленные угрозой радиационного поражения; 2) необходимость консервации отработавшего свой срок реакторного оборудования, обладающего радиоактивностью; 3) высокие материальные затраты на строительство АЭС; 4) нежелателен режим работы с переменной мощностью для реакторов на тепловых нейтронах.
Наибольшее распространение в качестве топлива АЭС получил уран-235 (U235), содержащийся в природном уране в очень небольшом количестве (≈0,7 %). Столь малое процентное содержание U235 не позволяет поддерживать реакцию деления ядер в реакторах на тепловых нейтронах, к которым относятся ВВЭР и РБМК. Для осуществления цепной реакции, природный уран обогащается, т.е. содержание в нем U235 повышается до нескольких процентов (≈2,5-4,5 %). Топливо в современных реакторах применяется в виде таблеток обогащенной двуокиси урана UO2, помещенных в металлическую трубку. Такая металлическая трубка называется тепловыделяющим элементом (твэл). Для реактора ВВЭР-1000, комплект из 312 твэлов образует тепловыделяющую сборку, которые в количестве 163 штук размещаются внутри реактора, в активной зоне. Тепловая энергия выделяется в активной зоне за счет торможения осколков деления в веществе таблетки и отводится от нее с помощью теплоносителя (воды), который омывает тепловыделяющие сборки.
Тепловая энергия, полученная в реакторе в результате саморазогрева ядерного топлива, превращается в энергию пара в парогенераторах и затем передается в турбогенератор, где преобразуется в электричество. Далее с помощью распределительных, силовых устройств электроэнергия направляется конечному потребителю. Такова очень упрощенная цепь процессов по выработке электроэнергии на двухконтурной АЭС. Она состоит из нескольких стадий преобразования (рис. 1.1). Сначала энергия существует в виде запасенной энергии ядерного топлива - 1. В результате ядерной реакции она преобразуется в тепло. Тепло передается теплоносителю (воде) 1-го контура - 2, который нагревает воду 2-го контура с последующим образованием пара - 3. Рабочее тело 2-го контура (пар) передает тепловую энергию турбине, где она превращается в механическую энергию вращения ротора - 4. Ротор турбины соединен с валом генератора и механическая энергия вращения преобразуется генератором в электроэнергию - 5. На заключительной стадии, отработавший в турбине пар превращается в воду и возвращается обратно в парогенераторы - 6. В реальности, конечно, все гораздо сложнее: за каждым энергопреобразующим агрегатом АЭС стоит целый ряд обслуживающих, управляющих и защитных систем, которые в большинстве случаев работают не обособленно, а в связке с другими подсистемами и взаимно влияют друг на друга. При эксплуатации АЭС приходится контролировать тысячи физических величин, основную долю из которых составляют температура, давление, уровень, концентрация и расход среды, а также нейтронно-физические параметры реактора. Тепловая схема АЭС с ВВЭР-1000 содержит более 1600 арматур, 290 электродвигателей (насосов) и 150 регуляторов, которые должны эффективно взаимодействовать друг с другом и со своими объектами управления в пределах единой АСУТП. Все это превращает АЭС в сложный инженерный комплекс, эффективная и безопасная эксплуатация которого требует от обслуживающего персонала высокой культуры безопасности, квалификации и глубоких знаний предметной области.
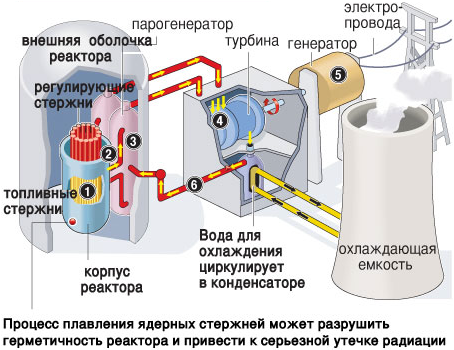
Рис. 1.1 Стадии преобразования энергий на двухконтурной АЭС
Поскольку при эксплуатации АЭС используется ядерное топливо и существует опасность радиационного поражения, то помимо экономических и технологических показателей работы энергоблоков, приходится выделять еще и проблемы обеспечения безопасности. Понятие безопасности АЭС можно определить, как ее свойство предотвращать возникновение ядерной аварии при эксплуатации или в случае аварии ограничивать радиационное воздействие на персонал, население и окружающую среду. Как показывает мировой опыт, качество решения всех перечисленных вопросов (экономических, технологических и защитных) во многом определяется эффективностью АСУТП. Именно исходя из требований безопасности, технологические системы АЭС и связанные с ними подсистемы АСУТП, разделяются на системы нормальной эксплуатации и системы безопасности. Системы нормальной эксплуатации обеспечивают плановое, нормальное функционирование энергоблока, а именно: разогрев реактора, выход на мощность, работу на мощности, останов, расхолаживание и перегрузку топлива. Системы безопасности включаются в работу только в случае возникновения аварий и призваны устранить или минимизировать их последствия. При нормальном функционировании АЭС системы безопасности находятся в дежурстве. По характеру выполняемых функций системы безопасности делятся на защитные, локализующие, обеспечивающие и управляющие. Среди систем нормальной эксплуатации можно выделить такие, отказы которых не влияют на безопасность АЭС, тогда как отказы другой группы могут стать исходными событиями для аварий. Последний класс систем называют системами нормальной эксплуатации, важными для безопасности. Возможно также объединение «аварийных и нормальных» функций, при котором некоторые системы АЭС являются системами нормальной эксплуатации, но в случае возникновения аварии, также берут на себе функции систем безопасности, и наоборот. Например, активная часть САОЗ может использоваться в режиме планового снижения мощности реактора (нормальная эксплуатация), но при возникновении течей теплоносителя, также обеспечивает подачу борированной воды в корпус реактора с целью отвода тепла от активной зоны и недопущения расплавления тепловыделяющих сборок при снижении уровня воды (функции безопасности). Таким образом, по степени влияния на безопасность, технологические системы АЭС и подсистемы АСУТП можно разделить на: 1) системы нормальной эксплуатации, не влияющие на безопасность; 2) системы нормальной эксплуатации, важные для безопасности; 3) системы безопасности; 4) комбинированные системы. При аппаратной реализации подсистем АСУТП на 2-ом блоке РоАЭС используется различная элементная база: системы управления нормальной эксплуатации создаются на основе комплекса ТПТС, а системы безопасности – на основе аппаратуры КТПС-ПН. В данном пособии, мы будем подробно рассматривать как регуляторы нормальной эксплуатации на основе ТПТС, так и регуляторы систем безопасности КТПС-ПН. Причем для оборудования ТПТС будут изучены как схемы подключения регуляторов к объектам управления, так и алгоритмическая сторона вопроса – программирование функциональных модулей в среде GET. Оборудование КТПС-ПН будет рассмотрено без глубокой детализации, а только на уровне алгоритмов работы и монтажных схем.
С точки зрения теории управления, сложность объекта автоматизации, а именно, атомной станции, состоит в том, что большинство физических процессов на АЭС взаимозависимы, многомерны, имеют различную физическую природу, возмущающие факторы часто носят случайный характер и потому трудно предсказуемы, а количество управляемых параметров по одному энергоблоку превышает несколько тысяч. Отклонение режима работы какого-либо из элементов АЭС влияет на другие элементы, причем это влияние является двусторонним, распространяясь как на последующие, так и на предшествующие по технологическому процессу элементы. Например, изменение положения регулирующих клапанов турбины, с одной стороны, изменяет ее мощность, а с другой – изменяет давление и температуру пара 2-го контура. В блоках с реакторами ВВЭР, из-за изменившихся условий теплообмена в парогенераторах, изменяется температура теплоносителя в 1-ом контуре, что высвобождает положительную или отрицательную реактивность реактора и влияет на его мощность. Таким образом, изменение режима одного элемента энергоблока, изменило режимы работы всех остальных элементов без всякого воздействия на их органы регулирования, а только за счет взаимного влияния физических процессов в них. Столь сложное взаимодействие технологических, а как следствие, и управляющих систем АЭС определяет сложную, иерархическую и распределенную структуру АСУТП с централизацией контроля на панелях БЩУ/РЩУ. Роль оператора БЩУ при управлении весьма активна: он наблюдает за технологическими процессами, контролирует параметры безопасности, определяет и реализует воздействия на исполнительные механизмы. В тех случаях, когда системы автоматического управления не в состоянии правильно управлять процессами, активное и грамотное вмешательство оператора может существенно улучшить положение. При этом оператор БЩУ должен реагировать на большое количество сигналов, фиксировать множество параметров, принимать решения по стабилизации технологических процессов в условиях крайне ограниченного времени (рис. 1.2, рис. 1.3). Поэтому при авариях, для компенсации фактора человеческой ошибки, все действия по прекращению цепной реакции, охлаждению активной зоны и предотвращению выхода радиоактивных веществ в атмосферу, осуществляются автоматически под управлением систем безопасности. В соответствии с ОПБ-88/97 системы безопасности АЭС спроектированы так, чтобы при автоматическом запуске возможность их отключения оперативным персоналом блокировалась в течение 10-30 минут.
В настоящее время на многих АЭС России происходит внедрение нового, более надежного класса систем управления, основой которых является микропроцессорная техника. Ростовская АЭС в этом плане не является исключением. В цифровых системах, алгоритм управления задается не выбором внешних компонентов, например, резисторов и конденсаторов, как это было в аналоговых регуляторах, а программными средствами. Если в аналоговых регуляторах для изменения закона управления приходится изменять аппаратную часть (добавлять новые компоненты, выводить старые или переставлять различные «перемычки»), то в цифровых системах достаточно просто изменить программу, а аппаратную начинку можно оставить прежней. И хотя аппаратная платформа АСУТП изменилась – аналоговые микросхемы и жесткая логика (Каскад-2 и УКТС) заменены на микропроцессорные средства (ТПТС и КТПС-ПН), – принципы организации, анализа и синтеза систем управления остались прежними. Например, если на 1-ом энергоблоке РоАЭС для управления объектом использовался ПИ-регулятора, то такой же ПИ-регулятор с теми же коэффициентами будет управлять аналогичным объектом и на 2-ом энергоблоке РоАЭС. Разница лишь в том, что на 1-ом блоке ПИ-регулятор был реализован на аналоговой аппаратуре Каскад-2 (блок Р-27), а на 2-ом блоке – на микропроцессорных средствах ТПТС (модуль 1411). Конечно, если параметры идентичных по назначению объектов управления на 1-ом и 2-ом энергоблоках РоАЭС отличаются, что вполне возможно, то будут отличаться и коэффициенты регуляторов. Но, как правило, эти различия незначительны.

Рис. 1.2 Блочный щит управления 1-го энергоблока РоАЭС

Рис. 1.3 Блочный щит управления 2-го энергоблока РоАЭС
Из-за сложности технологического процесса и высоких требований по безопасности, АСУТП 2-го и 1-го блоков РоАЭС является распределенной системой, состоящей из следующих уровней (для 2-го блока РоАЭС) (рис. 1.4):
1. Система верхнего блочного уровня – объединяет с помощью компьютерных сетей и сетевого оборудования, информационно-вычислительную систему Портал и панели БЩУ/РЩУ в единое информационное пространство АЭС Этот уровень является сосредоточением всех информационных процессов на атомной станции и играет наиважнейшую роль при управлении энергоблоком во всех режимах работы. Вся информация о ходе технологических процессов и состоянии оборудования АЭС поступает в ИВС Портал, где сортируется, архивируется, обрабатывается и в наглядном виде представляется оперативному персоналу. Персонал станции анализирует полученную информацию и принимает решения по воздействию на управляемые процессы. Ключи управления основными технологическими системами АЭС и сигнализационные табло (текстовые, звуковые) смонтированы на панелях БЩУ. С местных щитов управления (МЩУ), которые сосредоточены не в одном месте, а разнесены по территории станции, производится управление вспомогательными системами, не требующими постоянного присутствия персонала.
2. Уровень низовой автоматики - реализован на микропроцессорных средствах ТПТС, КТПС-ПН и разделен на системы управления нормальной эксплуатации и управляющие системы безопасности. Этот уровень является промежуточным между уровнем связи с объектом управления (уровень 3) и системой верхнего блочного уровня (уровень 1) и предназначен для реализации всех «интеллектуальных» функций по сбору, обработке информации, организации управления, принятию решений по блокировкам (защите). Структурно, он состоит из шкафного оборудования, объединенного между собой в сеть с помощью цифровых интерфейсов и промышленных шин. Т.е. цифровые регуляторы компонуются в блоки и помещаются в шкафы. Шкафы объединяются в сеть заданной конфигурации и с одной стороны подключаются к уровню СВБУ, а с другой - к объектам управления через уровень связи с ТОУ. При этом уровень СВБУ контролирует ход всех технологических процессов АЭС и является управляющим центром, а уровень связи с ТОУ обеспечивает «беспроблеммное» сопряжение регуляторов и объектов управления. Требования к регуляторам систем безопасности и регуляторам нормальной эксплуатации различны – первые всегда выполняются многоканальными, взаимно независимыми и резервированными. Т.е. системы безопасности (СБ) проектируется так, чтобы не допустить выход из строя нескольких каналов одной системы по одной общей причине. Для этого, например, отдельные каналы СБ запитываются от разных источников энергии, причем расположенных в независимых друг от друга помещениях. Если один источник питания выйдет из строя, то это отразится на работе только одного канала, другие каналы СБ будут работать в прежнем режиме. Регуляторы перечисленных локальных систем управления могут быть организованы в иерархии, в которых главный регулятор управляет подчиненными, а те, в свою очередь, воздействуют на свои объекты управления (рис. 1.4 – регулятор РЕГ2). Такой режим управления называется групповым (логическим) управлением. Здесь важно отметить, что измерение сигналов, обработка информации, срабатывание защит и блокировок оборудования происходит, в большинстве случаев, автоматически (без участия человека). Однако все важные решения по управлению физическими процессами на АЭС принимает и реализует человек-оператор. Пульты управления находятся на уровне СВБУ на панелях БЩУ/РЩУ. Т.е. системы управления нормальной эксплуатации работают под жестким контролем оператора и могут находиться либо в автоматическом, либо в ручном режиме. Системы безопасности при возникновении аварии функционируют в автоматическом или полуавтоматическом режиме при минимальном вмешательстве человека. По крайней мере, на начальной стадии аварии, для компенсации фактора человеческой ошибки, оператор не может коренным образом повлиять на работу систем безопасности – свою основную функцию они выполняют только в автоматическом режиме, оператор может лишь слегка корректировать их работу. Только через определенное время (обычно 10-30 мин), когда оператор полностью оценит аварийную ситуацию и успокоится, он может повлиять на работу систем безопасности.
3. Уровень связи с объектом управления - реализован на средствах КИП, силовых аппаратах, прочих согласующих устройствах и предназначен для создания благоприятных условий по сопряжению объектов управления с уровнем низовой автоматики. Например, уровень связи с объектом выполняет гальваническое разделение силовых и управляющих цепей, коммутацию высоковольтных цепей исполнительных механизмов по командам низковольтных цепей регуляторов, согласование уровней передаваемых сигналов, защитные функции и т.д. На этом уровне, как и на уровне низовой автоматики, наблюдается тенденция по «интеллектуализации» оборудования, что предполагает включение в состав датчиков и исполнительных механизмов микропроцессорных средств, которые выполняют самодиагностику, предварительную обработку информации, управляют резервированием оборудования и т.д. Выходные сигналы датчиков и входные сигналы исполнительных механизмов имеют унифицированные интерфейсы – это ток 0-5 мА, 0-20 мА, 4-20 мА и напряжение 0-5 В, 0-10 В, 0-24 В, что значительно облегчает подключение других компонентов систем управления к этим устройствам. Исключением здесь являются, пожалуй, только датчики температуры – термопары и термосопротивления.
Рис. 1.4 Уровни иерархии АСУТП: ОУ–объект управления, Д–датчик, ИМ – исполнительный механизм, СА–согласующая аппаратура, РЕГ - регулятор, ИВС – информационно-вычислительная система, БЩУ–блочный щит управления, РЩУ – резервный щит управления, СВБУ – система верхнего блочного уровня, ТОУ – технологический объект управления
На всех трех уровнях АСУТП информация передается сначала снизу вверх а потом сверху вниз (или только в одну сторону). Приведем типовой пример:
1. датчики Д измеряют физические параметры объектов управления ОУ (давление, температура, уровень, расход и т.д.), преобразуют их в унифицированные электрические сигналы и передают на уровень низовой автоматики. На рис. 1.4 сигналы о физических параметрах объектов отмечены знаком «↑»;
2 .
уровень низовой автоматики принимает
унифицированные сигналы датчиков (знак
«↑») и определяет их достоверность –
каждому сигналу присваивает статус
«достоверен-недостоверен». Если
электрическому сигналу присвоен статус
«достоверен», то низовая автоматика
добавляет к нему «временную
метку», которая фиксирует время измерения
сигнала. Недостоверные сигналы не
учитываются при управлении. Затем
низовая автоматика анализирует
достоверную информацию и либо
самостоятельно организует управление,
возвращая управляющие сигналы на
исполнительные механизмы ИМ, а затем -
на объекты (знак «↓»), либо передает
нормированные сигналы датчиков на
уровень СВБУ для принятия решений
оператором (знак «↑»). В первом случае,
регуляторы низовой автоматики работают
в автоматическом режиме, во втором
случае – в ручном. Выбор режима
производится по сигналам уровня СВБУ
(знак «↓»)
(рис. слева). К нормированным сигналам
датчиков (знак «↑»), уровень низовой
автоматики добавляет информацию о
достоверности показаний и времени
измерений (знак «↑»),
об исправности регуляторов (исправен-
неисправен), информацию о режимах работы
объектов (нормальный режим – отклонение
от нормального режима) и о состоянии
исполнительных механизмов (работа –
ремонт – резерв, открыто – закрыто,
включен – выключен) (знак «↑»);
.
уровень низовой автоматики принимает
унифицированные сигналы датчиков (знак
«↑») и определяет их достоверность –
каждому сигналу присваивает статус
«достоверен-недостоверен». Если
электрическому сигналу присвоен статус
«достоверен», то низовая автоматика
добавляет к нему «временную
метку», которая фиксирует время измерения
сигнала. Недостоверные сигналы не
учитываются при управлении. Затем
низовая автоматика анализирует
достоверную информацию и либо
самостоятельно организует управление,
возвращая управляющие сигналы на
исполнительные механизмы ИМ, а затем -
на объекты (знак «↓»), либо передает
нормированные сигналы датчиков на
уровень СВБУ для принятия решений
оператором (знак «↑»). В первом случае,
регуляторы низовой автоматики работают
в автоматическом режиме, во втором
случае – в ручном. Выбор режима
производится по сигналам уровня СВБУ
(знак «↓»)
(рис. слева). К нормированным сигналам
датчиков (знак «↑»), уровень низовой
автоматики добавляет информацию о
достоверности показаний и времени
измерений (знак «↑»),
об исправности регуляторов (исправен-
неисправен), информацию о режимах работы
объектов (нормальный режим – отклонение
от нормального режима) и о состоянии
исполнительных механизмов (работа –
ремонт – резерв, открыто – закрыто,
включен – выключен) (знак «↑»);
3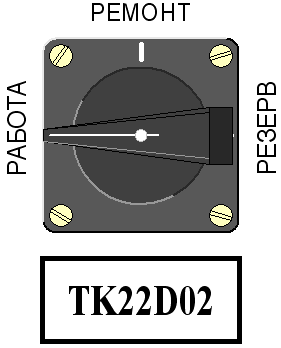
 .
на уровень СВБУ стекается весь поток
информации о технологических процессах,
происходящих на АЭС – это сигналы о
физических параметрах объектов управления
(знак «↑»),
о достоверности сигналов датчиков и
временных
метках (знак «↑»),
о состоянии исполнительных механизмов,
регуляторов и другой аппаратуры (знак
«↑»),
служебные и системные сигналы (знаки
«↕»
и «↕»).
Операторы БЩУ и оперативный персонал
соответствующих цехов, для которых
выведены мониторы ИВС, анализируют
полученные сигналы и, в случае
необходимости, могут повлиять на ход
управляемых процессов. Как правило, это
происходит за счет выбора режима
управления (автоматическое или ручное
– знак «↓»),
выбора режима работы оборудования
(основной, резерв или ремонт – знак «↓»)
(рис. слева), поворота тумблеров пультов
управления и последующего воздействия
на исполнительные механизмы
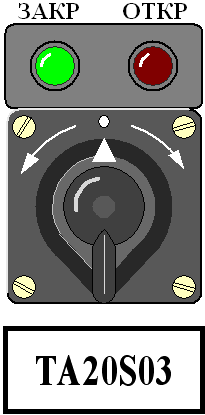
(включить-выключить насос, открыть-закрыть
арматуру) (рис. слева). Если выбран ручной
режим управления, то происходит
непосредственное воздействие на
исполнительные механизмы через ключи
БЩУ – знак «↓»
(оператор сам управляет – без регулятора).
В этом случае, низовая автоматика просто
согласует уровни сигналов без какой-либо
сложной обработки данных. Если выбран
автоматический режим, то уровень СВБУ
никак не воздействует на низовую
автоматику и полностью полагается на
работу автоматических регуляторов
(прямой обратной связи от СВБУ к низовой
автоматике нет – сигнал проходит по
замкнутому контуру: объект → датчик →
низовая автоматика → исполнительный
механизм → объект). Обратную связь от
СВБУ к низовой автоматике в этом случае
можно назвать косвенной – в автоматическом
режиме уровень СВБУ не управляет, а
просто наблюдает за работой автоматических
регуляторов. Т.е. операторы БЩУ и персонал
цехов просто контролируют процессы
управления, оценивая их ход по сигналам
ИВС и визуальным /звуковым сигналам БЩУ
(рис. 1.5). В случае выхода управляемых
параметров за границы уставок, операторы
могут перевести заданные регуляторы в
ручной режим и самостоятельно
подкорректировать ход процессов;
.
на уровень СВБУ стекается весь поток
информации о технологических процессах,
происходящих на АЭС – это сигналы о
физических параметрах объектов управления
(знак «↑»),
о достоверности сигналов датчиков и
временных
метках (знак «↑»),
о состоянии исполнительных механизмов,
регуляторов и другой аппаратуры (знак
«↑»),
служебные и системные сигналы (знаки
«↕»
и «↕»).
Операторы БЩУ и оперативный персонал
соответствующих цехов, для которых
выведены мониторы ИВС, анализируют
полученные сигналы и, в случае
необходимости, могут повлиять на ход
управляемых процессов. Как правило, это
происходит за счет выбора режима
управления (автоматическое или ручное
– знак «↓»),
выбора режима работы оборудования
(основной, резерв или ремонт – знак «↓»)
(рис. слева), поворота тумблеров пультов
управления и последующего воздействия
на исполнительные механизмы
(включить-выключить насос, открыть-закрыть
арматуру) (рис. слева). Если выбран ручной
режим управления, то происходит
непосредственное воздействие на
исполнительные механизмы через ключи
БЩУ – знак «↓»
(оператор сам управляет – без регулятора).
В этом случае, низовая автоматика просто
согласует уровни сигналов без какой-либо
сложной обработки данных. Если выбран
автоматический режим, то уровень СВБУ
никак не воздействует на низовую
автоматику и полностью полагается на
работу автоматических регуляторов
(прямой обратной связи от СВБУ к низовой
автоматике нет – сигнал проходит по
замкнутому контуру: объект → датчик →
низовая автоматика → исполнительный
механизм → объект). Обратную связь от
СВБУ к низовой автоматике в этом случае
можно назвать косвенной – в автоматическом
режиме уровень СВБУ не управляет, а
просто наблюдает за работой автоматических
регуляторов. Т.е. операторы БЩУ и персонал
цехов просто контролируют процессы
управления, оценивая их ход по сигналам
ИВС и визуальным /звуковым сигналам БЩУ
(рис. 1.5). В случае выхода управляемых
параметров за границы уставок, операторы
могут перевести заданные регуляторы в
ручной режим и самостоятельно
подкорректировать ход процессов;
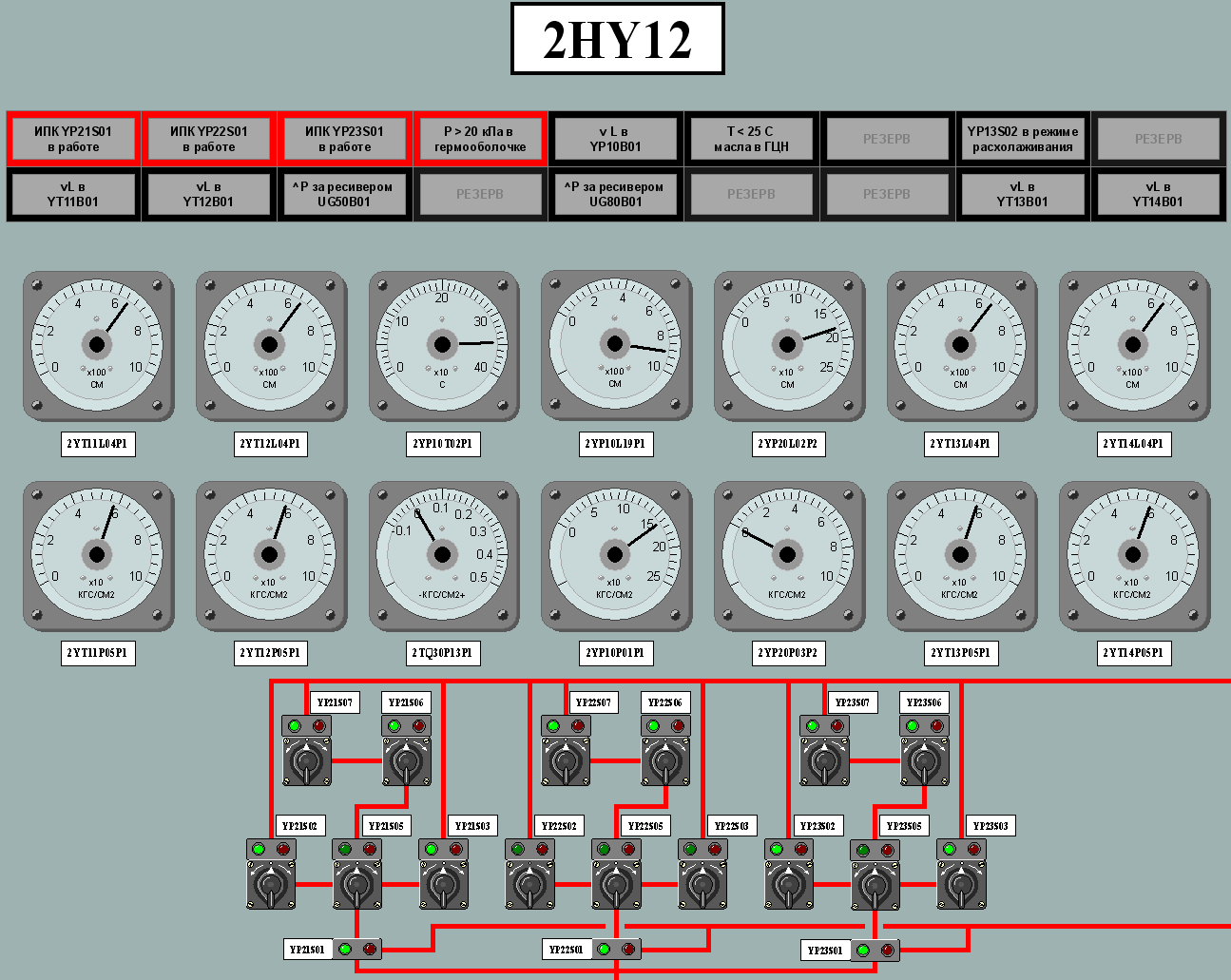
Рис. 1.5 Индикация процессов управления на панелях БЩУ (фрагмент 2HY12)
4. уровень низовой автоматики по сигналам СВБУ «↓» переводит регуляторы в заданный режим работы и, если необходимо, изменяет режим работы оборудования. Например, переводит резервный насос в статус основного, а основной выводит в ремонт – эти действия также отмечены знаком «↓». Если выбран ручной режим управления, то уровень низовой автоматики не используется и сигналы от БЩУ передаются на исполнительные механизмы напрямую. Если выбран автоматический режим, то уровень низовой автоматики принимает сигналы о физических параметрах (знак «↑»), определяет их достоверность (знак «↑»), нормирует, проверяет состояние исполнительных механизмов, регуляторов (знак «↑») и если они находятся в «нормальном» состоянии и работают в «нормальном» режиме, то передает управляющие сигналы на уровень связи с ТОУ (знак «↓»). Если некоторые исполнительные механизмы находятся в «неправильном» состоянии (например, требуется открытие регулирующей арматуры, но она и так уже полностью открыта), то уровень низовой автоматики блокирует прохождение управляющих сигналов «↓», отключая заданный исполнительный механизм – знак «↓». В этом случае предусмотрены запасные воздействия, которые направлены на стабилизацию режимов работы объектов управления, например, включение резервных исполнительных механизмов (ИМ) в дополнение к основным. При этом вся информация о ходе управления, о том, какие ИМ и датчики используются в данный момент, о режимах их работы и т.д. стекается на уровень СВБУ и представляется операторам в наглядном виде (рис. 1.5). На АЭС низовая автоматика управляет, но управляет под жестким контролем операторов СВБУ, которые в любой момент могут перевести автоматические регуляторы в ручной режим и подкорректировать ход процессов;
5. если по командам СВБУ установлен автоматический режим работы регуляторов, то уровень связи с объектом принимает управляющие сигналы низовой автоматики (знак «↓») и передает их на исполнительные механизмы, которые воздействуют на объекты управления и приводят их состояние к заданному. Если же регуляторы переведены в ручной режим, то операторы БЩУ сами управляют исполнительными механизмами (знак «↓»), например, открывают-закрывают регулирующий клапан или включают-выключают насос. Отметим, что во многих системах управления АЭС происходит взаимное проникновение уровней низовой автоматики и связи с объектом. Например, кроссовые стойки и стойки промреле входят в состав комплекса ТПТС (низовая автоматика), но не выполняют при этом никакой интеллектуальной обработки данных, а просто согласуют уровни передаваемых напряжений, выполняют гальваническую развязку, коммутируют сигналы и т.д. Т.е. по сути, эти стойки выполняют типичные функции уровня связи с ТОУ, но при этом относятся к уровню низовой автоматики. Точно так же некоторые датчики могут брать на себя функции, свойственные низовой автоматике. Например, датчики Метран-22 имеют встроенный микропроцессор, который выполняет линеаризацию характеристики датчика, вводит поправки на изменение температуры окружающей среды и т.д.
В заключение еще раз отметим, что на всех рассмотренных этапах происходит постоянное оповещение персонала станции о ходе процессов управления – на уровень СВБУ передаются сигналы о физических параметрах объектов управления, о состоянии датчиков, регуляторов, исполнительных механизмов, о режимах их работы и т.д. Эта информация отображается на панелях БЩУ и мониторах ИВС. Если управляющие процессы протекают не так, как нужно, то формируются сигнализационные сообщения (звуковые, световые, текстовые), происходит срабатывание защит (блокировок), которые не допускают повреждения оборудования и критического отклонения параметров объектов.