

14. Способ замены плоскостей проекций. Основные задачи преобразования.
Сущность способа замены плоскостей проекций заключается в том, что заданный геометрический объект в пространстве остается неподвижным, а система плоскостей проекций ( «старая» система) заменяется новой системой перпендикулярных плоскостей проекций, по отношению к которым рассматриваемый объект занимает частное положение.
В процессе преобразования чертежа важно, чтобы геометрические объекты расположенные в I четверти оставались в ней и после замены плоскостей проекций. Заменяется одна плоскость, а вторая остается.
Основные задачи преобразования:
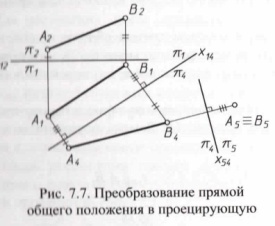
При которой прямая общего положения становится прямой уровня ( 1 замена)
При которой прямая общего положения или уровня становится проецирующей прямой ( 2 замены или 1 соответсвенно)
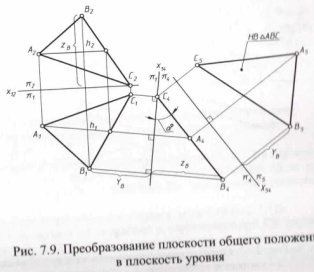
При которой плоскость общего положения становится проецирующей ( 1 замена)
При которой плоскость общего положения или проецирующая становится плоскостью уровня (2 замены или 1 соответсвтенно)
15. Способы вращения вокруг проецирующих прямых и прямых уровня. Основные элементы вращения. Плоскопараллельное перемещение. Алгоритмы решения задач.
Сущность способов вращения заключается в следующем: при вращении плоскости фигуры ( объект вращения) вокруг некоторой неподвижной оси, называемой осью вращения, каждая точка вращаемой фигуры перемещается в плоскость вращения перпендикулярную к оси вращения. Точка вращается по окружности, центр которой расположен в точке пересечения оси вращения с плоскостью вращения. Радиус окружности вращения равен расстоянию от центра вращения. Плоскость совмещения, с которой совмещается вращаемая фигура выбирается в зависимости от цели, поставленной в задаче.
Основные элементы вращения:
Ось вращения
Объект вращения
Плоскость вращения
Центр вращения
Радиус вращения.
Сущность плоскопараллельного перемещения заключается в том, что одна из проекций геометрического объекта, оставаясь равной самой себе, перемещается в плоскости чертежа по произвольной траектории до требуемого положения, а другие проекции его точек перемещаются в плоскостях уровня, то есть по прямым, параллельным оси проекций.
Алгоритм решения задач:
Выбираем ось вращения
Через точку провести плоскость вращения , являющуюся фронтальной или горизонтальной
Находим центр вращения, как точку пересечения оси вращения с плоскостью вращения
Проводим траекторию точки в виде дуги окружности радиусом вращения
Перемещаем точку в требуемое положение на угол
16. Многогранники. Образование гранных поверхностей. Пересечение многогранников проецирующей плоскостью и плоскостью общего положения. Алгоритмы решения задач.
Многогранник – геометрическое тело, ограниченное со всех сторон отсеками пересекающихся поверхностей.
Гранные поверхности образуются частями пересекающихся плоскостей.
Пересечение многогранников проецирующей плоскостью и плоскостью общего положения:
Способ ребер - находят точки пересечения ребер многогранника с плоскостью, т.е. находят вершины многоугольного сечения, соединяя вершины получают стороны многоугольника.
Способ граней – находят прямые пересечения граней с плоскостью.
Алгоритмы решения задач:
(способом граней)
Заключить грани в плоскости посредники частного положения
Найти линии пересечения заданной плоскости и посредников
Определить вершины фигуры сечения
Определить видимость сторон фигуры с учетом видимости граней. Стороны принадлежащие видимым граням видимые.
(способом ребер)
Заключить ребра многогранника в плоскости посредники частного положения
Найти линии пересечения посредников с заданной плоскостью
Определить вершины фигуры сечения в искомых точках пересечения ребер многогранника с найденными линиями
Определить видимость