

Формат символічної частини мікрооперацій
Арифметична:
![]()
Логічна:
Все те саме, лише відсутній сигнал Ci.
Приклад:R1+R2→R2:
![]()
R1-R2→R1: R-S-1+Ci=y
![]()

Реалізувати задану функцію на АЛУ з двонаправленою магістраллю:
R0=2![]()

АЛУ з однонаправленими внутрішніми магістралями та з одно адресним СОЗУ
Відсутність локальної магістраллі. Всі вузли АЛУ поєднанні між собою внутрішніми одно направленими шинами.На вхід АЛБ один з операндів поступає з акумулятора, другий поступає безпосередньо з регістра СОЗУ. Результат по каналу Y фіксується в акумуляторі. Тобто результат може бути сдвинутим або несдвинутим.Тут відсутня мікрооперація пересилка.
Пересилка:
R2→PA
PA:=R2 V 0
Пример R0=r[R1+R2]
r[R1+R2]=PA

{or PA, r1, 0;} |
{add srl PA, PA, r2, 0;} |
{sub r0, PA, r0, 1;} |
{} |
Алу з однонаправленими внутрішніми магістралями та з двонаправленим созу
Відсутність акумулятора. Операнди поступають на вхід АЛБ безпосередньо з СОЗУ. При використанні двонаправленого СОЗУ для адресації регістру використовуються два канали.

Приклад: R0=r[R1+R2]-R0
Бму з відносною адресацією

Приклад 1. Виконати в АЛУ з внутрішніми однонаправленими магістраллями з однонаправленим СОЗУ зсув слова подвійної довжини.

Приклад 2. Виконати додавання слів подвійної довжини : R1.R2:=R1.R2+R3.R4.

Ознакою переповнення зберігається автоматично


![]()
![]()
![]()
![]()
{}
Правило розмноження альтернативних вершин: адреса альтернативних вершин відрізняється на
=1
![]()
=0
: ![]()
Проектування еом з мікропрограмувальним керуванням
Спомошью этой схемы мы получили возможность отладить и изучить ЭВМ с микропрограммным управлением, выполнить интерпритацию команд, изучить способы адресации данных к общей памяти, изучить принципы обмена данными между общей памятью и процессорами. Изучить способы ввода/вывода информации, изучить способы обработки прерывания ЭВМ и других механизмов функционирования ЭВМ.
Для этого разработана программная среда COMPLEX, она включает в себя: эмулятор ЭВМ, текстовый редактор и микроассемблер, который позволяет писать программы.
Структура еом
Модель дозволяє створити свою систему команд
До складу ОС входить:

1.Ядро,до складу якого входить блок мікропрограмного керування БМК та блок обробки даних БОД,який поділяється на АЛУ та СКСЗ(схема керування стану та зсуву).
2.Інтерфейс системної шини(ІСШ), що містить регістр адреси РА та буфер даних.
3.Загальна пам’ять(ЗП).
4.Пристрій вводу-виводу(ПВВ).
5.Блок пріоритетних переривань (БПП).
6.Пристрої поєднанні системною шиною(СШ).

В ядрі для обміну даними між пристроями використовується локальні шина.
7.СШ складається з шини адреси, шини даних та шини керування.
8.Шина адреси має розрядність- 20 розрядів. Шина даних має розрядність- 16.
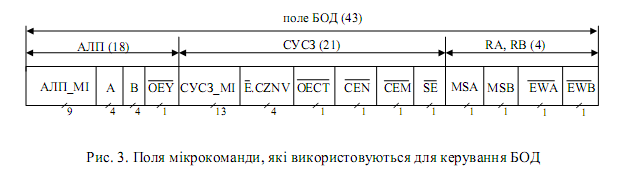
Шина керування- система провідників,яка використовується для передачі керуючих сигналів, для кожного керуючого сигналу виділяється один провідник.