

27. Установление степени статической неопределимости из соотношения Чебышева и по формуле для замкнутых контуров
Соотношение Чебышева основа для определения количества неопределимости
n = 3К - Ш
К – число замкнутых контуров
Ш – число простых шарниров
Для рамы с затяжкой (затяжка на шарниры крепится к стойкам рамы)
n = - W = - (3х2 – 2х2 – 4) = 2
для рамы с затяжкой (затяжка жестко крепится к стойкам рамы)
n = 3х2 - 2 = 4
произвольный замкнутый контур трижды статически неопределим n = 3
для рамы с неподвижными шарнирами в основании стоек
n = - W = - (3х1 – 2х0 – 4) = 1
замкнутый контур – это стержневая система в которой начало первого стержня совпадает с концом другого.
28. Влияние температурно-кинематических возмущений на ндс с.Н.С.
В отличие от С.О.С. в С.Н.С. под действием изменения температур в лишних связях возникают усилия. В этом случае заданную систему можно заменить эквивалентной как по усилиям. Так и по деформациям С.О.С., которая будет находиться под совместным действием изменения температуры , с одной стороны, и вызванных ею реакций в лишних связях, с другой стороны.
От этих реакций возникнут внутренние усилия, определяемые эпюрами M, Q, N.
Заданную С.Н.С., находящуюся под кинематическим воздействием, следует рассчитывать, заменяя её эквивалентной ей статически определимой, нагруженной совместным действием заданного смещения опор или других связей и усилий, вызванных этим смещением в лишних связях.
29. Метод сил в расчёте статически неопределимых балок, рам, арок, ферм.
 n
= 1
n
= 1
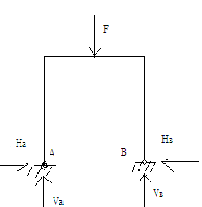
П - образная рама, опертая на неподвижные шарниры
Vа, Vв, Hа, Hв - неизвестны
Количество уравнений равновесия – 3
Для того, чтобы замкнуть набор уравнений (получить 4), воспользуемся условиями совместности деформаций.
 Х
– неизвестное усилие.
Х
– неизвестное усилие.
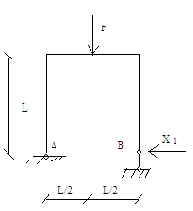
Потребуем, чтобы горизонтальное смещение т.В = 0
3 ур. Равновесия + ∆ Хв = 0
Введём: i,j
δ i,j – смещение по i – тому направлению от j – го направления нагрузки.
∆ i,p – смещение по i – тому направлению от внешней нагрузки.
Смещение от неизвестной силы Х1 в следствии линейности теории:
∆ Х(Х1) = δ11 ∙ Х1
∆ Хв = δ11Х1 + ∆1р = 0 (*) – каноническое уравнение методасил.
Из ур. (*) вычисляем неизвестную силу Х1 и появляется возможность осуществить ресчёт заданной системы через расчёт основной системы.
Для нахождения δ11 строится эпюра от единичного усилия
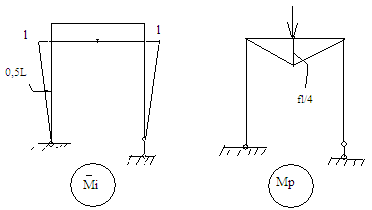
δ11
=
 (ac+4ef+bd)
(ac+4ef+bd)
∆1p
= ∫

30.Алгоритм метода сил.
1. Устанавливаем степень статической неопределимости в заданной системе.
2.Создается основная система метода сил, путем устранения условно лишних связей.
3.Записыватся каноническая система уравнений.
4.Строится единичная и грузовая эпюры в о.с.м.с.
5. определяют смещения и
6.Решается каноническая система уравнений и определяется неизвестное
7.Строится эпюра Мок по формуле:
8.Проводиться кинематическая проверка правильности расчета.
9. По эпюре Мок строится эпюра Q
Qок, по эпюре поперечных усилий строится эпюра продольных усилий.