

Агрегатів на електростанціях
Для гідравлічних турбін таким регулюючим органом служить направляючий апарат, відкриття якого як координата управління позначається .
Навантаження в місцях споживання змінюється безперервно. Найменший період зміни — доба. Зафіксовані через визначений інтервал часу (зазвичай година) або безперервно значення навантаження складають так званий добовий графік навантаження даного споживача або вузла споживання. Добовий графік характеризується максимальним (піковим), мінімальним і середнім навантаженнями. Чим більше відхилення екстремальних навантажень від середньої, тим менше ущільнений графік, тим більший діапазон зміни навантажень агрегатів, регулюючих потужність. З окремих графіків навантаження вузлів (районів) споживання складаються відповідні графіки навантаження ЕЕС, ОЕС і ЄЕС. Зміна навантаження у вузлах споживання має в основному плановий (детермінований) характер, але завжди виникають непланові, випадкові зміни навантаження навіть при найдосконалішому прогнозуванні. Мають місце і аварійні зміни розвиваючої, переданої і реалізованої потужності. Для підтримки системного балансу активної потужності необхідне регулювання частоти обертання агрегатів на відповідних ЕС.
Виробництво, розподіл і реалізація електричної енергії повинні проводитись при мінімальних трудових затратах, тому режим роботи ЕЕС повинен бути в цьому плані оптимальним. На оптимальність режиму ЕЕС істотно впливає розподіл навантажень між джерелами енергії, тобто між окремими парогенераторами, турбоагрегатами ЕС і між ЕС, що входять в ЕЕС, а також потокорозподіл в мережах живлення.
По мірі зростання ЕЕС, створення ОЕС і ЄЕС підвищується стабільність частоти, оскільки частка окремих випадково і дискретно змінюваних споживачів знижується. Проте навіть невелике відхилення частоти призводить до великих абсолютних змін потужності, що порушує оптимальність режиму роботи окремих ЕС. В цих умовах велику роль відіграє регулювання потужності агрегатів окремих ЕС, що забезпечує їх оптимальний режим і потокорозподіл в мережах, де можуть виникати недопустимі перевантаження ліній високої напруги.
Все сказане визначає необхідність автоматичного регулювання частоти і потужності агрегатів для забезпечення стабільності частоти в ЄЕС, ОЕС і ЄЕС, оптимальності і надійності їхньої роботи в різних режимах. З цією метою в окремих ЄЕС, об'єднаннях і Єдиній енергетичній системі країни створюється автоматична система регулювання частоти і потужності (АСРЧ і П), побудована на ієрархічному принципі і є підсистемою АСУ галузі виробництва, розподілу і використання електричної енергії. Для вивчення принципів формування АСРЧ і П необхідно розглянути елементи її реалізації для агрегатів ЕС, ЄЕС, ОЕС і ЄЕС.
3.2 Турбіна як об'єкт регулювання частоти і потужності
Для того щоб з'ясувати особливості турбіни як об'єкту регулювання, необхідно оцінити її здатність нести навантаження при різних значеннях частоти обертання в сталих режимах і визначити поведінку турбіни в перехідному процесі при тих або інших обуреннях. Особливості турбіни можуть бути визначені з основного диференціального рівняння руху ротора агрегату, записаного для моментів на валу агрегату:
![]() (3.1)
(3.1)
де J — момент інерції ротора агрегату; MT— рушійний момент на валу турбіни; МГ — момент опору на валу генератора, згідно якому сталий режим має місце при МТ=МГ, а перехідні процеси визначаються динамічним моментом МД=МТ—МГ.
Для оцінки здатності турбіни нести навантаження при різних значеннях частоти обертання звичайно використовуються статичні характеристики турбіни — MT (ω) і генератора МГ (ω). Статичні характеристики турбін можуть бути отримані з рівнянь їх потужності по співвідношенню МТ=РТ /ω
Для парової турбіни:
![]()
де АП— числовий коефіцієнт, який залежний від прийнятих одиниць вимірювання; D —часова витрата пари; Ho— тепловий перепад; ηo — тепловий ККД парової турбіни.
Для гідравлічної турбіни:
![]() ,
,
де АГ - числовий коефіцієнт, який залежить від прийнятих одиниць вимірювання; Q - витрата води; H - діючий тиск;
η - ККД гідротурбіни.
Оскільки момент турбіни залежить від витрати енергоносія, його потенційної енергії і ККД, то звичайно статичні характеристики в координатах MT, ω для різних значень положення регулюючого органу представляють сімейством кривих, приблизний вигляд яких показано на рис. 3.2
Рисунок 3.2 - Моментні характеристики турбіни MT (ω) і генератора МГ(ω).
Статичні характеристики генератора визначаються статичними характеристиками навантаження, розглянутими вище (див. гл. 5). Ці характеристики генератора в координатах MT, ω для різних значень навантаження при номінальній частоті представляються сімейством кривих, зразковий вид яких також показаний на рис. 3.2.
В сталому режимі роботи агрегату, коли МТ=МГ, динамічний момент рівний нулю, рівно нулю і прискорення; агрегат має постійну частоту обертання. На рис. 3.2 точка а відповідає деякому сталому режиму при постійному значенні ωа.
Якщо навантаження в будь-який момент часу зміниться, наприклад зменшиться, то відбудеться перехід із статичної характеристики МГ,1 на характеристику МГ,2 при незмінній кількості пари, яка подається в турбіну. Виникає динамічний момент МД і прискорення. Почнеться перехідний процес (динамічний перехід), в результаті якого наступить новий сталий режим, який відповідає точці b, при якому МГ,2 стане рівним МТ,1, а кутова частота обертання збільшиться до значення ωb· Властивість турбін переходити із одного сталого режиму в інший при подачі незмінної кількості енергоносія називається самовирівнювання або саморегулювання. Однак, при зміні режиму агрегату від холостого ходу до номінального відхилення ω і ККД турбіни будуть значними.
Для збереження частоти обертання на попередньому рівні слід змінити кількість пари, яка подається в турбіну, що призведе до переходу на характеристику МТ,2 і повернення частоти обертання до значення ωа · Отже, для підтримки величини ω при змінах навантаження слід автоматично впливати на регулюючі органи турбіни, для відповідної зміни кількості енергоносія. Цю роль виконують автоматичні регулятори частоти обертання (АРЧО), що є невід'ємною частиною парових і гідравлічних турбін.
Для досліджень законів регулювання частоти і потужності звичайно використовується лінійна теорія автоматичного регулювання (див. гл. 6), де розглядаються процеси при малих обуреннях, що виникають в лінійній моделі агрегату. Для отримання такої лінійної моделі в загальному випадку нелінійна залежність МТ(ω, D) і МГ (ω) розкладається в ряд Тейлора по приростах координат ω і D і використовується лінійна частина цього розкладу. Лінеаризоване диференціальне рівняння запишеться у вигляді
![]() ,
(3.2)
,
(3.2)
де
![]() ωо
— кутова частота обертання в початковому
режимі; Dо - витрата пари через
турбіну в початковому режимі.
ωо
— кутова частота обертання в початковому
режимі; Dо - витрата пари через
турбіну в початковому режимі.
В теорії автоматичного регулювання незалежні змінні (координати) і їх прирости виражаються у відносних безрозмірних одиницях. В літературі по регулюванню турбін безрозмірні координати позначаються буквами грецького алфавіту. За базисні звичайно приймаються їх номінальні значення ωном , Dном і координати визначаються як
![]()
![]()
Вираз (3.2) при безрозмірних координатах має вигляд:
![]() (3.
2а)
(3.
2а)
Проте права і ліва частини рівняння мають розмірність моменту і для переходу до безрозмірного диференціального рівняння вибирається базисне значення моменту, в якості якого можуть бути прийняті ном, або Dном або номінальний момент МТ,ном. Від прийнятого базисного моменту залежить вид диференціального рівняння руху і відповідної передавальної функції турбіни, як типової ланки . Так, якщо за базисний момент приймається ном , то диференціальне рівняння для лінійної моделі агрегату записується у вигляді
![]()
де
![]() - постійна часу інерції агрегату;
- постійна часу інерції агрегату;![]() — коефіцієнт передачі.
— коефіцієнт передачі.
Передавальна функція має вигляд:
![]() ,
,
де
![]()
![]() —зображення
відповідних координат.
—зображення
відповідних координат.
При використовуванні в якості базисного моменту МТ,ном лінійне диференціальне рівняння руху парової турбіни можна записати у вигляді
![]()
де
![]() — постійна часу інерції агрегату,
яка чисельно рівна часу розгону агрегату,
з, від = 0 до ном
при постійному номінальному моменті;
-коефіцієнт
самовирівнювання агрегату.
— постійна часу інерції агрегату,
яка чисельно рівна часу розгону агрегату,
з, від = 0 до ном
при постійному номінальному моменті;
-коефіцієнт
самовирівнювання агрегату.
Передавальна функція турбіни
![]() . (3.3)
. (3.3)
Як видно з приведених виразів для передавальної функції, турбіна може бути представлена як інерційна ланка першого порядку. Проте часто самовирівнювання турбіни не враховується (коефіцієнт приймається рівним нулю), турбіна представляється інтегруючою ланкою з диференціальним рівнянням вигляду
![]()
і передавальною функцією вигляду
![]() (3.4)
(3.4)
Раніше приведені співвідношення записані в термінах і позначеннях, використовуваних в технічній літературі по конструюванню турбін. В літературі, присвяченій дослідженню електромеханічних перехідних процесів, використовується дещо інша термінологія і позначення. Щоб читач міг успішно орієнтуватися в різних літературних джерелах, ті або інші співвідношення будуть даватися у відповідних термінах і позначеннях.
Наведений приклад лінійного моделювання турбіни як об'єкту регулювання виявляв взаємозв'язок між зміною положення регулюючого органу, як вхідної координати і зміною частоти обертання, як координати виходу. Проте для різних режимів роботи турбоагрегату, його лінійні моделі відрізняються одна від одної, оскільки повинні враховуватися різні чинники, що впливають на перехідні процеси в ньому.
Нижче розглядаються основні режими роботи агрегатів і відповідні лінійні моделі.
Режим холостого ходу. З погляду стійкості системи регулювання частоти обертання агрегату цей режим є найважчим, оскільки відсутній синхронізуючий момент в гeнераторі, сприяючий збереженню стійкості.
При дослідженнях режиму холостого ходу модель агрегату представляється інтегруючою ланкою з постійної часу інерції TJ, що враховує маси роторів турбіни, що обертаються і генератора. Вхідна і вихідна координати залишаються попередніми, ефект самовирівнювання турбіни не враховується, оскільки витрата енергоносія мала. Модель агрегату показана на рис. 3.3.
Режим роботи агрегату (групи агрегатів)
на ізольоване навантаження або в
автономній ЕЕС. При паралельній роботі
групи агрегатів здійснюється заміна
їх одним еквівалентним агрегатом. Модель
агрегату розділяється
на модель генератора і модель турбіни.
Інертність мас роторів турбіни, що
обертаються і генератора враховується
в моделі генератора, яка представлена
інтегруючою ланкою з постійною часу
інерції TJ. Для врахування регулюючого
ефекту навантаження, а іноді, і для
врахування ефекту самовирівнювання, в
турбіні вказана ланка охоплюється
ланкою жорсткого від’ємного зворотного
зв'язку з коефіцієнтом передачі, що
враховує регулюючий ефект навантаження
![]() або регулюючий ефект навантаження і
самовирівнювання турбіни
або регулюючий ефект навантаження і
самовирівнювання турбіни
![]() .
.
(p)
(p)
1/Tjp


Рисунок 3.3 - Модель агрегату в режимі холостого ходу
Оскільки вихідною координатою зворотного
зв'язку є потужність, то вхідною
координатою інтегруючої ланки, теж
повинна бути потужність. Зміна вхідної
координати дозволяє реалізувати обурення
на вході моделі як зміна навантаження
генератора
![]() .
Передавальна функція еквівалентного
генератора записується у вигляді
.
Передавальна функція еквівалентного
генератора записується у вигляді
![]() (3.5)
(3.5)
де
![]() -
зображення приросту кутової частоти
обертання;
-
зображення приросту кутової частоти
обертання;
![]() -
зображення приросту потужності турбіни;
TJ - постійна часу
інерції, обчислена з врахуванням переходу
на нову вхідну координату.
-
зображення приросту потужності турбіни;
TJ - постійна часу
інерції, обчислена з врахуванням переходу
на нову вхідну координату.
Модель агрегату в режимі навантаження показана на рис. 3.4. Оскільки при регулюванні агрегату кількість енергоносія при зміні навантаження міняється, виникає необхідність моделювати взаємозв'язок між положенням регулюючого органу і потужністю, що розвивається на валу турбіни, і враховувати інертність енергоносія (пари або води) при зміні положення регулюючого органу, що і здійснюється в моделі турбіни.
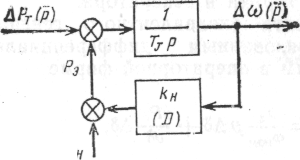
Рисунок 3.4- Модель генератора в режимі автономного навантаження
Для парових турбін без проміжного перегріву в моделі враховується лише інертність парового об'єму в паропроводі від дросельного клапана до входу в циліндр високого тиску (ЦВТ). Турбіна моделюється інерційною ланкою з постійною часу, рівній часу спорожнення паропроводу ТП. Передавальна функція турбіни записується у вигляді
![]() (3.6)
(3.6)
де
![]() —зображення
приросту положення дросельного клапана.
—зображення
приросту положення дросельного клапана.
Модель парової турбіни без проміжного перегріву показана на рис. 3.5. Модель турбоагрегату складається з моделі турбіни і моделі генератора.
Для парової турбіни з проміжним перегрівом пари в моделі враховується інерційна пара до входу в ЦВТ аналогічно турбіні без проміжногo перегріву. Крім того, враховується значна інерційність об'єму пари в пароперегрівачу.
Пароперегрівач моделюється інерційною ланкою з постійною часу його спорожнення ТПП.
![]()
Рисунок 3.5 - Модель парової турбіни без проміжного
перегріву пару
В ЦВТ турбін розвивається лише частина потужності турбіни (с=0,15...0,3), решта частини (1—с) розвивається в ЦСТ і ЦНТ.
Оскільки перегрітий пар проходить тільки через ЦСТ і ЦНТ, пароперегрівач має передавальну функцію виду
![]() З врахуванням сказаного,
передавальна функція турбіни з проміжним
перегрівом записується у вигляді
З врахуванням сказаного,
передавальна функція турбіни з проміжним
перегрівом записується у вигляді
![]() (3.7)
(3.7)
Іноді вираз в дужках приводить до одного знаменника і моделюють турбіну з проміжним перегрівом двома послідовно включеними ланками
![]()
Модель турбіни з проміжним перегрівом показанa на рис. 3.6.
Для гідравлічної турбіни інертність водяного потоку проявляється в так званому «гідравлічному ударі», що відбувається у водопідвідних спорудах і в проточній частині турбіни. Якщо відбувається стрибкоподібна зміна положення направляючого апарату турбіни а у бік закриття, як це, показано на рис. 3.7,а, то в результаті збільшення тиску води у водоводі і збільшення швидкості потоку води потужність, що розвивається турбіною в перехідному процесі, спочатку збільшується, а потім починає зменшуватися до нового встановленого значення, що відповідає новому положенню направляючого апарату.

.
Рисунок 3.6 -Модель парової турбіни з проміжним перегрівом пари: а - перший варіант моделі;
б- другий варіант моделі
Явище гідравлічного удару описується алгебраїчними і диференціальними рівняннями, які зв'язують швидкість потоку води, напір, відкриття направляючого апарату і довжину водоводу. Спільне рішення цих рівнянь дозволяє визначити передавальну функцію гідравлічної турбіни у вигляді
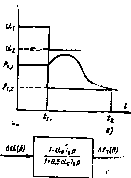
Рисунок 3.7- Модель гідравлічної турбіни з врахуванням гідравлічного удару: а- явище гідравлічного удару; б - модель турбіни
![]() (3.8)
(3.8)
де αо — відкриття направляючого апарату в початковому режимі; ТВ — постійна часу водоводу, ТВ=Lυо/gHо; Hо, υо — напір і швидкість руху води в початковому режимі; L — довжина водоводу; g — прискорення падаючої води.
Модель гідравлічної турбіни з врахуванням гідравлічного удару показана на рис. 3.7,б.
Режим роботи агрегату в потужній ЕЕС. В цьому режимі регулювання потужності агрегату відбувається при постійності частоти, тому модель еквівалентного агрегату повинна відображати зміну потужності еквівалентного генератора під впливом зміни кута вектора ЕРС генератора δ по відношенню до вектора напруги в опорній точці електроенергетичної системи.
Дослідження перехідних процесів звичайно проводиться при роботі еквівалентного агрегату через лінію високої напруги на шини нескінченної потужності - в одномашинній схемі або в двомашинній схемі. При моделюванні використовується лінеаризоване диференціальне рівняння, яке визначає прискорення при зміні потужності,
![]() (3.9)
(3.9)
де TJ,ек — еквівалентна постійна часу інерції мас, що обертаються, в ЕЕС; ∆РТ; ∆РТ — прирости потужностей еквівалентних турбін і генератора.
Приріст потужності еквівалентного генератора визначається лінеаризованим диференціальним рівнянням, записаним в операторній формі
![]()
де перший член правої частини враховує появу потужності, обумовленої асинхронним моментом, а другий - зміну синхронної потужності еквівалентного генератора.
Приріст потужності еквівалентної турбіни визначається з рівняння (3.9), записаного в операторній формі
![]() .
(3.10)
.
(3.10)
Передавальна функція еквівалентного агрегату в даному режимі записується у вигляді
 (3.11)
(3.11)
Приведені співвідношення для моделей агрегатів в різних режимах роботи дозволяють проводити дослідження перехідних процесів в АСРЧ і П.