

7 Индукционные преобразователи
Принцип действия преобразователей основан на использовании закона электромагнитной индукции (рисунок 7.1), согласно которому ЭДС индуцируемое в катушке равно:
![]() ,
,
где
![]() –
скорость изменения магнитного потока;
–
скорость изменения магнитного потока;
w – число витков.
Рисунок 7.1 Схема преобразователя для измерения скорости вращения
Индукционные преобразователи применяют для измерения параметров магнитных полей, частоты вращения, параметров вибрации, расхода жидких веществ.
Наибольшее применение они получили в приборах для измерения угловой скорости и измерения параметров вибраций.
Индукционные преобразователи для тахометров представляют собой небольшие генераторы постоянного или переменного тока, ротор которых механически связан с измеряемым объектом. При использовании генератора постоянного тока об угловой скорости судят по ЭДС генератора. А в случае применения генератора переменного тока угловую скорость можно определить как по значению величины ЭДС, так и по ее частоте.
Рисунок 7.2 – Электромагнитный датчик перемещения
Преобразователь для измерения перемещений (рисунок 7.2) представляет собой цилиндрическую катушку 1, перемещающуюся в небольшом зазоре магнитопровода 2. Цилиндрический постоянный магнит 3 создает в кольцевом зазоре постоянное радиальное магнитное поле. Катушка при перемещении пересекает силовые линии магнитного поля, и в ней появляется ЭДС, пропорциональная скорости перемещения.
Индуктосины. Одной из разновидностей индуктивных преобразователей являются индуктосины. Они используются для измерения больших линейных и угловых перемещений. Принцип действия основан на взаимодействии двух плоских катушек (рисунок 7.3). Одна из них запитывается высокочастотным напряжением, а другая служит измерителем и перемещается относительно первой.
Рисунок 7.3 - Схема индуктосина
Индукционные преобразователи расходомеров. Принцип действия индукционного преобразователя расходомера поясняется на рисунке 7.4. В потоке жидкости, движущейся в трубопроводе 1 из немагнитного материала между полюсами магнита, возникает ЭДС, значение которой пропорционально скорости движения потока:
е = B·D∙v,
где В — магнитная индукция;
D — диаметр трубы;
v — скорость движения жидкости.
Эта ЭДС снимается с помощью электродов 2 и 3, изолированных от трубопровода.
К
а)
Р
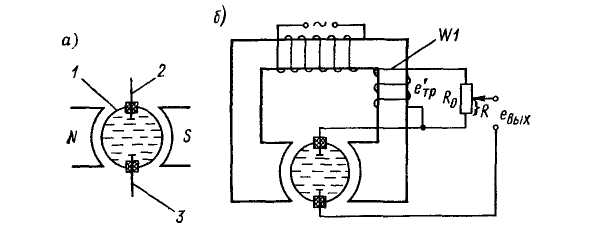
Индукционные расходомеры используются для измерения скоростей жидких металлов (жидкости с электронной проводимостью), водных растворов (жидкости с ионной проводимостью), и, кроме того, делаются попытки применить их для измерения скоростей диэлектрических жидкостей. Индукционные преобразователи расходомеров промышленного назначения имеют чувствительность 0,5…1,5 мВ/(м/с). Диаметр трубопроводов может быть весьма значительным, поэтому для создания магнитного поля используются обычно не постоянные магниты, а электромагниты. В расходомерах для жидких металлов применяют электромагниты, питаемые постоянным током. В расходомерах для воды и электролитов используются электромагниты (рисунок 7.4), питаемые для исключения напряжения поляризации только переменным током (частота 10…1000 Гц). В этом случае выходной сигнал е также является переменной ЭДС и из него легко могут быть исключены гальванические и термо-ЭДС. Однако в переменном магнитном поле, кроме ЭДС, обусловленной движением контура, будет индуктироваться ЭДС етр, называемая трансформаторной.
Для того чтобы уменьшить трансформаторную ЭДС, провода вторичного контура стремятся расположить так, чтобы площадь SK сцепления контура с переменным потоком была минимальной. Положение проводников, находящихся в поле, должно быть строго фиксировано, чтобы величина SK не изменялась. В контур вводятся специальные компенсационные петли (обмотка W1 на рисунок 7.3), в которых наводится ЭДС е'тр , включаемая встречно с ЭДС етр и регулируемая так, чтобы разность етр и e'тpR/R0 приблизительно равнялось нулю.
Кроме того, помеха в виде трансформаторной ЭДС и полезной ЭДС, пропорциональная скорости движения, как видно из приведенных выражений, сдвинуты по фазе на угол π/2 и могут быть разделены на выходе фоточувствительным усилителем.
Основная погрешность таких расходомеров находится в пределах 1,0…2,0 %.
50