

3.4. Частотные характеристики систем автоматического управления
При исследовании и проектирования автоматических систем обычно используют амплитудно-фазовые (АФЧХ) и логарифмические частотные характеристики (ЛЧХ) разомкнутых одноконтурных систем. Их передаточные функции W(s) легко могут буть преобразованы к виду
![]() ,
,
где Wi(s) – передаточные функции элементарных звеньев. В этом случае модули и аргументы частотных передаточных функций системы и звеньев
![]() ,
,
![]() ,
,
![]() ,
,
![]()
связаны между собой соотношениями
![]() ,
(3.60)
,
(3.60)
![]() .
(3.61)
.
(3.61)
Вещественные и мнимые частотные функции системы определяются равенствами
![]() .
(3.62)
.
(3.62)
Пользуясь соотношениями (3.60-3.62), можно построить АФЧХ – W(j ).
Логарифмическая амплитудная частотная характеристика (ЛАЧХ) из (3.60) записывается в виде:
![]() [дб] (3.63)
[дб] (3.63)
3.4.2. Частотные характеристики замкнутой системы. Номограммы для замыкания системы
Для анализа и синтеза САР (в частности, многоконтурных) может понадобится нахождение ЛАЧХ и ЛФЧХ замкнутой системы по известным ЛАЧХ и ЛФЧХ разомкнутой системы.
АФЧХ замкнутой системы в соответствии с главной передаточной функцией (3.49) при единичной обратной связи имеет вид:
Ф![]() . (3.64)
. (3.64)
Она может быть представлена в виде
Ф![]() , (3.65)
, (3.65)
где P() и Q() называются вещественной и мнимой частотными характеристиками замкнутой системы.
Представив исходную АФЧХ разомкнутой цепиW(j) в виде
![]() (3.66)
(3.66)
и подставив ее в формулу (3.65), найдем
 .
(3.67)
.
(3.67)
Линии P=const и Q=const оказываются окружностями на плоскости (U,V). На основании этого строится круговая номограмма. Наложив на поле этой номограммы заданную АФЧХ разомкнутой цепи W(j), построенную в координатах U() и V(), в точках пересечения ее с окружностями P=const и Q=const, получим значения вещественной P() и мнимой Q() частотных характеристик замкнутой системы [ 2 ].
Номограммы применимы для систем, имеющих единичную обратную связь. Если система имеет неединичную обратную связь, то передаточная функция системы в замкнутом состоянии имеет вид (см. рис. 3.20)
Ф
![]() .
(3.68)
.
(3.68)

Рис. 3.20. Схема системы с неединичной обратной связью
Для применения номограмм или построения ЛАЧХ замкнутой системы в этом случае следует представить передаточную функцию Ф(s) следующим образом:
Ф![]() . (3.69)
. (3.69)
Выражение в квадратных скобках дает возможность воспользоваться номограммой из [ 2 ] и найти ЛАЧХ, соответствующую этому выражению. Из полученной ЛАЧХ следует вычесть ЛАЧХ, соответствующую передаточной функции Z(s).
В результате получается ЛАЧХ замкнутой системы с неединичной обратной связью:
![]() .
(3.70)
.
(3.70)
При построении ЛАЧХ можно воспользоваться следующими соотношениями:
Когда
![]() ,
,
![]() ;
(3.71)
;
(3.71)
если
![]() ,
,
![]() .
(3.72)
.
(3.72)
Приведем пример построения ЛАЧХ и ЛФЧХ разомкнутой и замкнутой САУ.
Задана структурная схема САУ (рис. 3.21)
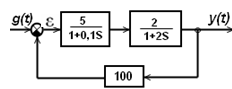
Рис. 3.21. Структурная схема САУ
Запишем соответствующие соотношения для построения:
Определяем асимптоты ЛАЧХ замкнутой САУ:
а) когда
![]() ,
,
![]() ;
;
б)
когда
![]() ,
,
![]() .
(3.73)
.
(3.73)
Определим
сопрягающие частоты
![]() ;
;
![]()
и отметим их на графике (рис. 3.22).
Строим асимптотические
ЛАЧХ. Строим
![]() разомкнутой цепи, для этого через точку
(
=1,
20lg1000)
проводим низкочастотную асимптоту с
нулевым наклоном до первой сопрягающей
частоты
2
и т.д.(см рис. 3.22). Далее таким же образом
строим
прямой цепи. Проверяем условия а) и б)
(3.73) и строим ЛАЧХ замкнутой САУ. ЛФЧХ
замкнутой САУ строится по соответствующей
ЛАЧХ.
разомкнутой цепи, для этого через точку
(
=1,
20lg1000)
проводим низкочастотную асимптоту с
нулевым наклоном до первой сопрягающей
частоты
2
и т.д.(см рис. 3.22). Далее таким же образом
строим
прямой цепи. Проверяем условия а) и б)
(3.73) и строим ЛАЧХ замкнутой САУ. ЛФЧХ
замкнутой САУ строится по соответствующей
ЛАЧХ.
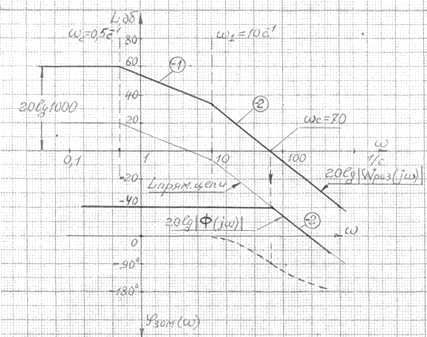
Рис. 3.22. Построение ЛАЧХ и ЛФЧХ замкнутой САУ (к примеру рис. 3.21)
4. Перенос узлов и сумматоров.
Для удобства расчетов автоматических систем бывает необходимо преобразовать многоконтурную структурную схему к одноконтурной. Замкнутую структурную схему системы называют одноконтурной, если при ее размыкании в какой-либо точке получается цепочка из последовательно соединенных звеньев или цепь, не содержащая параллельных и обратных связей. Например, это оказывается удобным для построения логарифмических частотных характеристик (ЛАЧХ и ЛФЧХ).
При преобразовании структурных схем возникает необходимость переноса и перестановки узлов и сумматоров. Приведем основные правила:
Перенос узла с выхода на вход звена:
Перенос узла с входа на выход звена:
Перенос сумматора с выхода на вход звена:
Перенос сумматора с входа на выход звена: