

33. Статические и динамические характеристики оу
Разработка любой системы автоматизации нач-я с анализа объекта управления. Для полной хар-ки объекта необходимо знать всего 3 параметра, кот. полностью описывают объект.
Ко- коэф-т передачи
объекта рис.
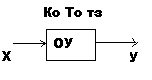
То- постоянная времени объекта
τз- время запаздывания
Эти параметры можно определить аналитически решая деф-е уравнение, или графически, из графиков статической и динам. характеристик.
Статическая характеристика- это зависимость выходного параметра ОУ от входного.
y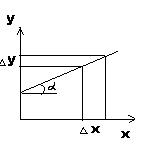 =f(x)
=f(x)
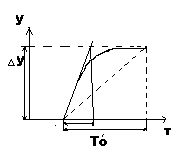
Kо=∆y/∆x- отношение изменения вых. величины к вызвавшему это изменение изменению входной величины.(всегда размерная величина) Динамическая характеристика- это зависимость выходного параметра от времени при подаче на вход возмущающего воздействия.
Время запаздывания- это время от момента внесения возмущающего воздействия до момента изменения выходного параметра.
Постоянная времени- это отрезок времени равный проекции касательной кривой разгона переходной характеристики, ограниченной начальным и новым, установившимся значениеми.
y=f(τ)
 Kо=∆y/∆x
Kо=∆y/∆x
34. Законы регулирования(з.Р.)
Это зависимость между величиной регулируемого воздействия и отклонением регулируемого параметра от заданного значения (рассогласование)
З.р. может быть задан аналитически, т.е. в виде формул.
Существуют з.р.:2-х позиционные
Функциональные:- П(пропорциональный)
-ПИ(пропорц-й- интегральный)
-ПИД(пропорц-й- интегрально-деференц-ный)
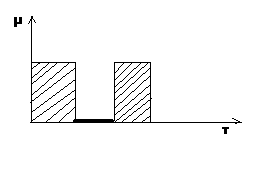
2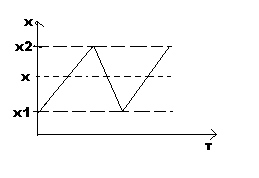 -х
позиционный з.р.-
это закон, в кот. при любом отклонении
регулируемого параметра от заданного
зн-я, регулирующий орган перемещается
в одно из крайних положений.
-х
позиционный з.р.-
это закон, в кот. при любом отклонении
регулируемого параметра от заданного
зн-я, регулирующий орган перемещается
в одно из крайних положений.
диапазон регулирования ∆=x2-x1, в кот. возможно изменение регулируемого параметра
Пропорциональный З.р.(П)
µ=Кр·∆z
Кр-коэф-т передачи регулятора
Поддерживают значение параметра с некоторой статической ошибкой
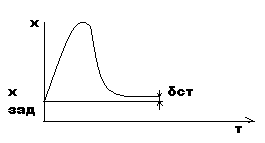 всегда
с ошибкой
всегда
с ошибкой
![]()
Bmax- максимальное возмущающее воздействие
Ко-коэф-т передачи объекта
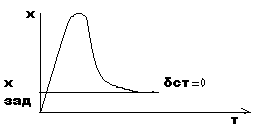
ПИ З.р.
Закон, при кот.
воздействие формируется по формуле:
![]()
Tu-время изодрома, она определяет степень введения интегральной составляющей закон.
ПИД З.р.
![]() Тд-время предворения
Тд-время предворения
Н астраиваемые
параметры: Кр,Тu,Тд
астраиваемые
параметры: Кр,Тu,Тд
По сравнению с ПИ регулятором позволяет уменьшить τрег- время регулирования. Выбор закона регулирования производится по спец. методикам.
Для выбора закона необходимо знать: пареметры, харкт-е свойства;
требования качества регулирования: время
35.Схемы сигнализации
По назначению различают: 1) сх. сигнализации положения
2) сх. технологической сигнализации
3) сх. командно-переговорной
1) сх. сигнализации положения оповещает о состоянии технологического процесса, об открытие-закрытие клапанов, вкл.-выкл. магнитных пускателей. Сигнализация осуществляется с помощью лампочек одной или двух.
2) сх. технологической сигнализации бывает: предупредительная- сигнализирует о ненормальных, но еще допустимых отклонениях технологических параметров, о нарушении отдельных элементов оборудования.
-аварийная- сигнализирует о недопустимых значениях контролирующих параметров, об аварийном состоянии технол. процесса.(авар. сигн-я световая, ставится еще и звуковая)
3) сх. командно-переговорной –предназначена для передачи односторонних или двусторонних различных сигналов, в условиях, когда использование др. видов связи затруднительно, технически не целесообразно или невозможно.
36.Автоматизация поршневого компрессора- измерение и регулирование параметров.
Система автоматического измерения должна предусматривать:
-тем-ра газа по всем ступеням ком-ра,
-тем-ра на линии всасывания,
-тем-ра масла, обмоток двигателя,
-тем-ра вкладышей подшипников,
-давления газа на всасывании, после каждой ступени,
-давление масла, воды на вх. в холодильник,
-уровень масла в картере,
-уровень жидкости во влагомаслоотделителях,
-расход на линии всас-я и нагн-я,
-наличие потока охл-щей воды и масла в системе смазки.
Система автоматического регулирования: -давление нагнетания