

1)Описание задачи
2)Определение целей моделирования
3)Анализ объекта или процесса
-изучение теоретических основ и сбор информации об объекте оригинале. Подбирается или разрабатывается подходящая теория, если её нет- устанавливается причина следственной связи между переменными, которые описывают объект. Определяются входные и выходные данные и принимаются упрощающие предположения.
-формализация- выбор системы условных обозначений и устанавливается класс задач к которым может быть отнесена полученная мат модель.
-выбор метода решения- устанавливаются окончательные параметры модели для полученной математической задачи. Выбирается какой-либо метод решения или разрабатывается специальный.
-реализация моделей- пишется программа, которая отлаживается, тестируется и получается решение задачи
-анализ полученной информации- сопоставляется полученное решение и предполагаемое
-проверка адекватности реальному объекту- результаты полученные по модели сопоставляются либо с имеющейся об объекте информацией, либо проводится эксперимент и его результаты сопоставляются с расчётами.
Линейное программирование Постановка задачи линейного программирования
Линейное программирование –наука, о методах исследования и отыскания экстремальных (наибольших и наименьших) значений линейной функции на неизвестные которой наложены линейные ограничения. Эта линейная функция называется целевой, а ограничения, которые автоматически записываются в виде уравнений или неравенств называются системой ограничений. Необходимые условия задачи линейного программирования: наличие ограничений на ресурсы, увеличение спроса, производственную мощность и другие производственные факторы. Математическая модель ЗЛП включает:
-максимум или минимум целевой функции
-систему ограничений в форме линейных уравнений и неравенств
-требования не отрицательности переменных
Фирма производит две модели А и Б сборных полок. Их производство ограничено наличием сырья(доски) и времени машинной обработки. Для каждого изделия модели А требуется 3 кв метра досок а для Б 4 кв м. Фирма может получать от своих поставщиков до 1700 кв м в неделю. Для каждого изделия модели А требуются 12 минут машинного времени. А для изделий модели Б- 30 минут. В неделю можно использовать 160 часов машинного времени. Сколько изделий каждой модели следует выпускать фирме в неделю, что бы максимизировать прибыль, если каждое изделие модели А приносит 2 доллара прибыли, а Б-4е.
Пусть х1-кол-во полок модели А, а х2-кол-во полок модели Б.
2*х1=прибыль от А
4*х2=прибыль от Б
F(х)=2*х1+4*х2 ->max (целевая функция),
3х1- кол-во досок для А
4х2- кол-во досок для Б
3х1+4х2<=1700 3x1+4x2<=1700
1/5x1+1/2x2<=160 2x1+5x2<=1600
X1=>0;x2=>0
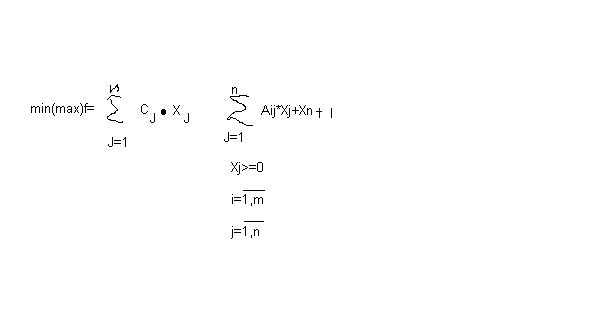
Общий вид: max(min)f(x)=с1*х1+с2*х2+…+сн*хн
A11*x1+a12*x2+…+a1n*xn
A21*x1+a22*x2+…+a2n*xn
…
Am1*x1+am2*x2+..amn*xn
Свойство задач линейно программирования
-допустимое множество решений либо пустое, либо является выпуклым многогранником- пересечение пространств, описываемых неравенствами.
-если допустимое множество не пустое, а целевая функция ограничена снизу, для задачи минимизации и сверху для задачи максимизации, то задачи линейного программирования имеет оптимальные решения.
-оптимальные решения задач линейного программирования всегда находятся на границе допустимого множества, т.е. если существует единственное оптимальное решение, то им является какая-либо вершина многогранника допустимых решений. Если две или несколько вершин являются оптимальными вершинами, то любая их выпуклая комбинация тоже является оптимальным решением(существует бесконечное множество точек максимума или минимума).
Задача:
При изготовлении изделий и1 и и2 используются токарные и фрезерные станки, а также сталь и цветные металлы. По технологическим нормам требуется 300 и 200 единиц соответственного токарного и фрезерного оборудования в станкочас. 10 и 20 едениц стали и цм металлов в станкочас. Для производства и2 -400, 100, 70, 50 соответствующих ресурсов. Цух располагает 12400,6800 станкочасами оборудования и 640 и 840 стали и цм соответственно. Прибыль от реализации и1-6, и2-16. Определить план выпуска изделий,обеспечивающий максимальную прибыль при условии, что время работы фрезерных станков должно быть использовано полностью.
Ресурсы |
И1 |
И2 |
Объём ресурсов |
Токарные станки |
300 |
400 |
12400 |
Фрезерные станки |
200 |
160 |
6800 |
Сталь |
10 |
70 |
640 |
Цм |
20 |
50 |
840 |
Прибыль |
6 |
16 |
|
F(x)=6и1+16и2->max
300x1+400x2<=12400
200x1+160x2=6800
10x1+70x2<=640
20x1+50x2<=840
X1>=0,x2>=0
X2=68-2x1
F(x)=1088-26x1
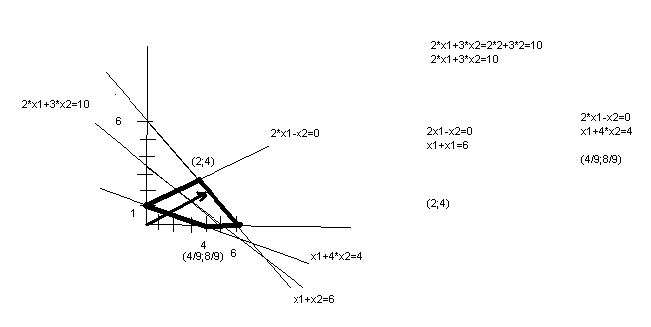
Графический метод решения
Если число неизвестных в задаче линейного программирования(ЗЛП) равняется двем, то её можно решить графическим методом
Max(min) =
c1*x1+c2*x2
 Bi
Bi
X=(x1;x2)
Z=2*x1+3*x2
X1+x2<=6
X1+4*x2>=4
2*x1-x2>=0
X1>=0;x2>=0
Каноническая форма задачи линейного программирования
Задачи линейного программирования имеют каноническую форму если:
-все ограничения, кроме условия отрицательности переменных, имеют вид строгих равенств, а все свободные члены не отрицательны
Сведём задачу линейного программирования к канонической форме добавив к левым частям системы ограничений дополнительные переменные- Xn+1. В целевую функцию дополнительные переменные вводятся с коэффициентом 0.
Min Z = 2*x1+3*x2
------------
x1+x2=10
-2*x1+3*x2<=-5 (-1)
7*x1-4*x2<=6
x1,x2>=0
------------
------------
x1+x2=10
2*x1-3*x2-0*x3=5
7*x1-4*x2+0*x4=6
x1,x2>=0
------------
Угловая точка с неотрицательным коэффициентом называется опорной. А соответствующий план- опорный план. Базисом опорного плана будем называть систему М линейно-независимых векторов из условия задачи в которую входят все вектора соответствующие не нулевым координатам опорного плана.
Min Z =-5*x1+6*x3
-----------
2*x1-2*x3<=2
2*x1+x2-x3>=3
Xj>=0,j=1..5
----------
-----------
2*x1-2*x3+x4=2
2*x1+x2-x3-x5=3
Xj>=0,j=1..5
----------
Базисная переменная x4 и x5.В целевую функцию не входит знак нуля.
Построение начального опорного плана
Ограничение канонической задачи имеет предпочтительный вид, если при неотрицательности его правой части левая часть содержит переменную входящую с коэффициентом равным единице, а остальные ограничения с коэффициентом равным нулю.
---------
2*x1-2*x3+x4=2
2*x1+x2-x3=3
--------
x0={0;3;0;2}
Если каждое ограничение имеет предпочтительный вид, т.е. система ограничений приведена к единичному неотрицательному базису, то начальный опорный план строится так- предпочтительные переменные выбираются в качестве базисных, а все остальные- свободные. Свободные переменные приравниваются к нулю, а базисные к свободным членам.
Max Z = 2*x1-x3+3*x4+x5
------
X1+4*x3+x4=4
16*x2+x3-2*x4=16
5*x2+x5=6
------
Z(x0)=10
Min Z = 10*x1-7*x2-5*x3+0*x4+0*x5+0*x6
------
6*x1+15*x2+6*x3+x4=9
14*x1+42*x2+16*x3+x5=21
2*x1+8*x2+2*x3+x6=4
------
X0={0;0;0;9;21;4}
Z(x0)=0
Такая система не имеет предпочтительного вида. В этом случае вводят искусственный базис путём перехода к M задаче.
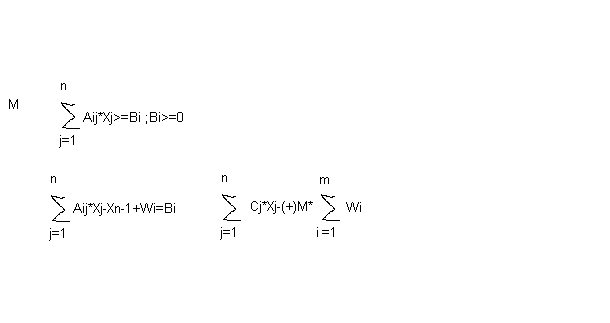
+ ограничение >=
- Ограничение <=
Min Z =-5x1+4*x2+3*x3+6*x4
-----
X1+21*x2+x3+2*x4<=3
-x1-14*x2-2*x3+3*x4>=2
-x1-6*x2+x3-x4>=1
------
-----
X1+21*x2+x3+2*x4+x5=3
-x1-14*x2-2*x3+3*x4-x6=2
-x1-6*x2+x3-x4-x7=1
------
-----
X1+21*x2+x3+2*x4+x5=3
-x1-14*x2-2*x3+3*x4-x6+W1=2
-x1-6*x2+x3-x4-x7+W2=1
------
Min Z =-5x1+4*x2+3*x3+6*x4+0*x5+0*x6+0*x7+M*W1+M*W2
Между оптимальными планами исходной задачи и М задачи имеется следующая связь- если в оптимальном плане М задачи все искусственные переменные Wi=0, то значения оставшихся координат дадут оптимальный план исходной задачи.
Симплексные таблицы
БП |
С5 |
А0 |
Х1 |
Х2 |
Х3 |
… |
Xn |
Xn+1 |
0 |
B1 |
|
|
|
|
|
Xn+2 |
0 |
B2 |
|
|
|
|
|
… |
0 |
Bm |
|
|
|
|
|
Zj |
Cj |
|
|
|
|
|
|
Max Z = 18*x1+20*x2+32*x3
----
18*x1+15*x2+12*x3<=720
6+x1+4*x2+8x3<=384
5*x1+3*x2+12*x3<=360
---
----
18*x1+15*x2+12*x3+x4=720
6+x1+4*x2+8x3+x5=384
5*x1+3*x2+12*x3+x6=360
---
Max Z = 18*x1+20*x2+32*x3+0*x4+0*x5+0*x6
БП |
С5 |
А0 |
Х1 |
Х2 |
Х3 |
X4 |
X5 |
X6 |
X4 |
0 |
720 |
18 |
20 |
32 |
0 |
0 |
0 |
18 |
15 |
12 |
1 |
0 |
0 |
|||
X5 |
0 |
384 |
6 |
4 |
8 |
0 |
1 |
0 |
X6 |
0 |
360 |
5 |
3 |
12 |
0 |
0 |
1 |
Zj |
Cj |
0 |
-18 |
-20 |
-32 |
0 |
0 |
0 |
Рабочая область таблицы начиная с 3его столбца и 3й строки содержит элементы расширенной матрицы над которыми будут проводиться преобразования с целью получения оптимального плана. В последней строке таблицы записано нулевое уравнение эта строка называется индексной строкой или строкой оценок. Индексная строка заполняется по формуле:
J= Сб*Аj-Cj
0*18+0*6+0*5-18
В столбце бп занесены базисные переменные. В столбце сб содержит элементы целевой функции стоящие при базисных переменных. Столбец а0 при базисных переменных содержит свободные элементы системы ограничений. Сверху над рабочей частью таблицы указаны все переменные и коэффициенты целевой функции.
Min Z = -6*x1+8*x2-x3+2*x4
----
-2*x1+x2+x3=8
3*x1-8*x2+x4=48
----
БП |
С5 |
А0 |
Х1 |
Х2 |
Х3 |
X4 |
X3 |
-1 |
8 |
-6 |
8 |
-1 |
2 |
-2 |
1 |
1 |
0 |
|||
X4 |
2 |
48 |
3 |
-8 |
0 |
1 |
Zj |
Cj |
88 |
14 |
-25 |
0 |
0 |
D0= -1*8+2*48=88
D1=-1*(-2)+2*3-(-6)=14
D2=-25
D3=0
D4=0
X0={0;0;8;48}
----
Х1+х2+х3=12
Х2+х4=2
2*x1+x2+x5=20
----
Max Z = 2*x1+4*x2+0*x3+0*x4+0*x5
БП |
С5 |
А0 |
Х1 |
Х2 |
Х3 |
X4 |
X5 |
X3 |
0 |
12 |
2 |
4 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
|||
X4 |
0 |
2 |
0 |
1 |
0 |
1 |
0 |
X5 |
0 |
20 |
2 |
1 |
0 |
0 |
1 |
Zj |
Cj |
0 |
-2 |
-4 |
0 |
0 |
0 |
БП |
С5 |
А0 |
Х1 |
Х2 |
Х3 |
X4 |
X5 |
X3 |
0 |
10 |
2 |
4 |
0 |
0 |
0 |
1 |
0 |
1 |
-1 |
0 |
|||
X2 |
4 |
2 |
0 |
1 |
0 |
1 |
0 |
X5 |
0 |
18 |
2 |
0 |
0 |
-1 |
1 |
Zj |
Cj |
8 |
-2 |
0 |
0 |
4 |
0 |
X3A0(2)=(X3A0(1)* X4X2(1)-X2A0(1)*X3X2(1))/X4X2(1)
БП |
С5 |
А0 |
Х1 |
Х2 |
Х3 |
X4 |
X5 |
X3 |
0 |
1 |
2 |
4 |
0 |
0 |
0 |
0 |
|
|
|
|
|||
X2 |
4 |
2 |
0 |
|
|
|
|
X1 |
2 |
9 |
1 |
0 |
0 |
-1/2 |
1/2 |
Zj |
Cj |
26 |
0 |
0 |
0 |
3 |
1 |
X*- оптимальное значение
X*=(9;2;1;0;0)
Алгоритм симплекс методов:
-используя каноническую форму определяем начальный опорный план
-строим симплексную таблицу, проверяем критерий оптимальности задачи на максимум, если в полученной таблице все элементы полученной таблицы не отрицательны, то такой план оптимален
-критерий оптимальности задачи на минимум- если в полученной таблице все элементы нижней троки не положительны, то такой план оптимален
-переходим к выбору разрешающего элемента- элемента, стоящего на пересечении разрешающей строки и столбца
-в задаче на минимум в качестве разрешающего столбца берём столбец, содержащий максимальный положительный элемент нижней строки
-в задаче на максимум- максимальный по модулю отрицательный элемент
-в качестве разрешающей строки берём строку, к которой отношение элементов столбца свободных членов А0 к соответствующему элементу разрешающего столбца минимальной соответствующий элемент должен быть положительный
Min{ Bi/Aik}
-строим новую таблицу, в которой заменяем базисную переменную на переменную разрешающего столбца
-осуществляем следующие преобразования- элементы разрешающей строки делим на разрешающий элемент. Элементы разрешающего столбца заменяются нулями. Вместо разрешающего элемента пишется единица. Все остальные элементы новой таблицы находятся по правилу прямоугольника- произведение главной диагонали( содерж разрешающий элемент) минус побочная диагональ и делить на разрешающий элемент.
Решение может быть не одно. Если в нижней строке последней симплексной таблицы имеется хотя бы 1н нулевой элемент соответствующий свободной переменной, то задача линейного программирования имеет бесконечное множество решений.
Признак пустого множества решений. Если в разрешающем столбце нет положительный элементов, то решений нет.
Метод искусственного базиса
В системе переменная Хn+I образуют искусственный базис. Получение максимального опорного плана исходной задачи основано на следующих утверждениях:
-если в оптимальном плане М задачах все искусственные переменные равны нулю, то план является оптимальным
-если в ОП по крайней мере одна из искусственных переменных положительна, то исходная задача не имеет ни одного плана
-если М задачи не имеет решения, то исходная задача не разрешима
В симплексных таблицах для функции F отводится две строки. Одну для f, другую для М. Если преобразования выполняются с двумя строками, то признак оптимальности сначала проверяется сначала по 2й строке. По ней же проверяются переменные, включаемые в базис. Процесс преобразования продолжается до тех пор, пока из базиса не исключены все искусственные переменные. По мере исключения из базиса этих переменных соответствующие им столбцы можно опускать.
f= -2*x1-6*x2+5*x3-x4-4*x5 (max)
-----
X1-4*x2+2*x3-5*x4+9*x5=3
X2-3*x3+4*x4-5*x5=6
X2-x3+x4-x5=1
-----
X1- так как не входит в след два
-----
X1-4*x2+2*x3-5*x4+9*x5=3
X2-3*x3+4*x4-5*x5+х6=6
X2-x3+x4-x5+х7=1
-----
Задача на максимум, значит в целевую ф они входят с -М
f= -2*x1-6*x2+5*x3-x4-4*x5-М(х6+х7)
x1=3+4*x2-2*x3+5*x4-9*x5
x6=6-x2+3*x3-4*x4+5*x5
x7=1-x2+x3-x4+x5
f= -2*(3+4*x2-2*x3+5*x4-9*x5)-6*x2+5*x3-x4-4*x5-М((6-x2+3*x3-4*x4+5*x5)+( 1-x2+x3-x4+x5
))= -6-8*x2+4*x3-10*x4+18*x5-6*x2+5*x3-x4-4*x5-M(7-2* x2+4*x3-5*x4+6*x5)=
=-6-14*x2+9*x3-11*x4+14*x5-M(7-2* x2+4*x3-5*x4+6*x5)
БП |
С5 |
А0 |
Х2 |
Х3 |
Х4 |
X5 |
БП |
С5 |
А0 |
Х2 |
Х3 |
X5 |
||||||
X1 |
-2 |
3 |
-4 |
2 |
-5 |
9 |
X1 |
-2 |
8 |
1 |
-3 |
4 |
||||||
X6 |
-4 |
6 |
1 |
-3 |
4 |
-5 |
X6 |
-4 |
2 |
3 |
1 |
-1 |
||||||
X7 |
7 |
1 |
1 |
-1 |
1 |
-1 |
X7 |
7 |
1 |
1 |
-1 |
-1 |
||||||
F |
|
-6 |
14 |
-9 |
11 |
-14 |
F |
|
-11 |
3 |
2 |
-3 |
||||||
|
M |
-7 |
2 |
4 |
-5 |
6 |
|
M |
-2 |
3 |
-1 |
1 |
||||||
БП |
С5 |
А0 |
Х2 |
Х5 |
|
БП |
С5 |
А0 |
Х2 |
Х3 |
X5 |
|||||||
X1 |
|
14 |
-8 |
2 |
X5 |
|
14 |
|
|
|
||||||||
X3 |
|
2 |
-2 |
-1 |
X3 |
|
1 |
|
|
|
||||||||
X4 |
|
1 |
-2 |
-1 |
X4 |
|
31 |
|
|
|
||||||||
F |
|
-21 |
9 |
-1 |
F |
|
-7 |
1 |
0 |
|
||||||||