5.Движение отдельных точек вращающегося твердого тела.
Х


 отя
все точки вращающегося тела имеют
одинаковые и кинематические
отя
все точки вращающегося тела имеют
одинаковые и кинематические
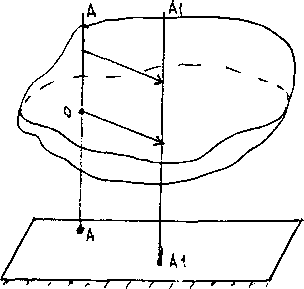
характеристики их движения ( и ) различаются. Предположим, что произвольная точка вращающегося тела находится на расстоянии г от оси вращения (рис.11).

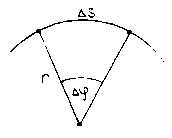
 За промежуток
времени t
проходит по своей траектории путь S
. Средняя скорость точки при этом равна:
За промежуток
времени t
проходит по своей траектории путь S
. Средняя скорость точки при этом равна:
а мгновенная:
С учетом направлений векторов угловой и
линейной скорости, а также радиус-вектора
рассматриваемой точки, получим:
учетом направлений векторов угловой и
линейной скорости, а также радиус-вектора
рассматриваемой точки, получим:
У
 скорение
отдельных точек вращающегося твердого
тела удобно определять по отдельным
его составляющим at,
an:
скорение
отдельных точек вращающегося твердого
тела удобно определять по отдельным
его составляющим at,
an:
П олное
ускорение точки равно
олное
ускорение точки равно

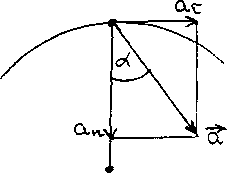
Как видно из приведенных соотношений, полное ускорение и отдельные его составляющие зависят от расстояния r до оси вращения.
Таким образом, угол отклонения вектора полного ускорения от радиуса вращения одинаков для всех точек тела.
6.Плоское движение твердого тела.
Плоским называют такое движение тела, при котором все его точки движутся в плоскостях, параллельных заданной неподвижной.

Для определения положения сечения в пространстве в любой момент времени необходимо прежде всего задать положение произвольной точки А (полюса) этого сечения векторным или координатным способом. Кроме того, необходимо провести в сечении произвольную прямую АВ и указать угол a (альфа), который она образует с одной из осей координат (рис. 14). Движение сечения считается
з аданным,
если для любого момента времени известны
зависимости:
аданным,
если для любого момента времени известны
зависимости:

или
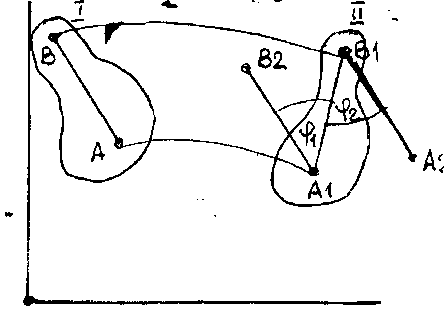


Следовательно, и в этом случае плоское перемещение можно представить как одновременно происходящие поступательное перемещение вместе с полюсом и вращение вокруг него. Очевидно, что и направление, и угол поворота в обоих случаях совладают. Поэтому кинематические характеристики поступательной части движения зависят от выбора полюса, а вращательной - не зависят.
7. Сила.
Изменение состояния тела происходит в результате взаимодействий, которые приводят к изменению, как внутреннего состояния тел, так и состояния их движения. Количественной мерой взаимодействий, приводящих к изменению состояний тел, является сила.
Сила - векторная величина, она характеризуется следующими элементами: величиной, направлением в пространстве и точкой приложения силы.
Линия, вдоль которой направлена сила, называется линией действия силы.
Совокупность сил, приложенных к телу, называют системой сил.
Если под действием системы сил, приложенных к телу, оно может пребывать в состоянии покоя, система называется уравновешенной
Сила, равная по величине равнодействующей и противоположно ей направленная, называется уравновешивающей.
Силы взаимодействия между телами одной и той же системы называются внутренними.
Силы взаимодействия с телами, не входящими в состав данной системы называются внешними.
Силы, приложенные в одной точке тела, называются сосредоточенными.
Силы, приложенные ко всем точкам поверхности или объема тела, называются распределенными.
СЛОЖЕНИЕ СИЛ И РАЗЛОЖЕНИЕ СИЛЫ НА СОСТАВЛЯЮЩИЕ.
С ложение
сил - задача нахождения равнодействующей
для заданной системы сил. Находить
равнодействующую можно аналитически
и геометрически. В простом случае
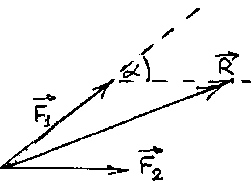
системы двух сил (рис. 18) можно аналитически
выразить величину равнодействующей
силы:
ложение
сил - задача нахождения равнодействующей
для заданной системы сил. Находить
равнодействующую можно аналитически
и геометрически. В простом случае
системы двух сил (рис. 18) можно аналитически
выразить величину равнодействующей
силы:
 (рис
18)
(рис
18)
где - угол между направлениями сил системы.
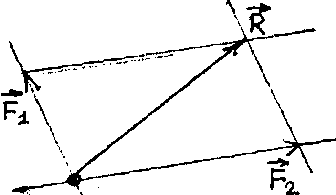
Разложением сил на составляющие называют задачу нахождения системы сил, для которой данная сила является равнодействующей.
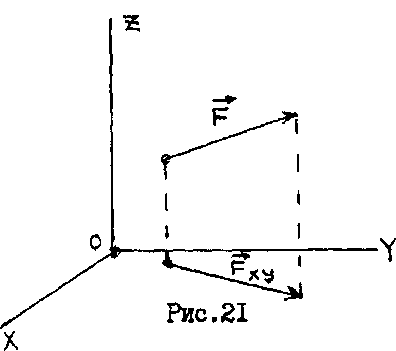
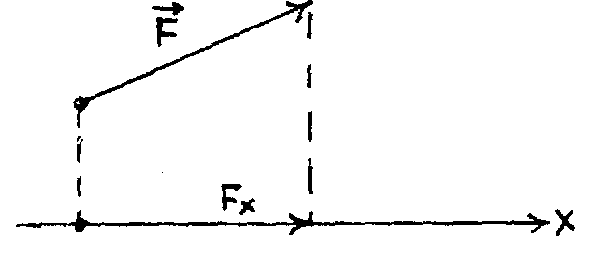
ПРОЕКЦИИ СИЛЫ НА ПЛОСКОСТЬ И ОСЬ.
Проекцией силы на плоскость называют вектор Fxy, заключенный между проекциями начала и конца вектора силы на заданную плоскость.
В отличие от проекции на плоскость, проекция силы на ось является скалярной величиной.