

4. Вимоги до інтерфейсу
Інтерфейс програми забезпечує виконання наступних функцій:
-
Завантаження даних з файлу (формат txt)
-
Можливість введення даних з клавіатури
-
Можливість вибору методу рішення задачі
-
Зручне представлення результатів обчислень
-
Повідомлення користувача про можливі помилки під час виконання програми
5. Опис реалізації сппр
Для реалізації СППР було використано платформу Visual Studio 2010 (мова програмування C#), оскільки дана платформа забезпечує досить швидку та зручну розробку програм для Windows.
Система складається з наступних модулів:
-
FormTransportMatrix
Модуль побудови транспортної матриці вручну або введення із файлу
-
UgorskiyMetod
Модуль реалізації угорського методу розв’язку транспортної задачі.
-
MetodPotehcialiv
Модуль реалізації методу потенціалів розв’язку транспортної задачі.
-
MinimalnuiElement
Модуль пошуку опорного плану методом мінімального елемента
-
SeveroZapadnogo
Модуль пошуку опорного плану методом північно-західного кута
-
DisplayResults
Модуль виведення результатів
6. Інструкція з експлуатації системи
Головне вікно програми має наступний вигляд:

Рис. 6.1 Головне вікно програми
Для створення робочого поля необхідно вибрати розмірність задачі та натиснути: «Побудувати матрицю».

Рис. 6.2 Створення робочого поля
Для завантаження даних з файлу необхідно натиснути: «Файл» - «Імпортувати дані» та вибрати файл.

Рис. 6.3. Завантаження даних.
Для отримання результатів виконання необхідно вибрати метод знаходження оптимального плану та, при необхідності, метод знаходження опорного плану і натиснути кнопку «Знайти оптимальний розв’зок».

Рис. 6.4. Результат виконання
7. Приклад роботи програми
Умова:
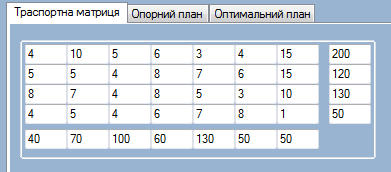
Рис. 7.1 Результат роботи програми (початкові дані)
Опорний план:

Рис. 7.2 Результат роботи програми (метод мінімального елемента)
Оптимальний план:

Рис. 7.3 Результат роботи програми (метод потенціалів)
8. Висновки
В ході даної роботи було розроблено СППР для оптимізації перевезень. Дана СППР призначена для вибору оптимального плану перевезень між постачальниками та виробниками і може мати різні сфери застосування, оскільки чимала кількість економічних оптимізаційних задач зводиться до розв’язання «транспортної задачі». Також перевагю даної СППР є досить висока швидкість роботи (для задачі розімірністю 100 виробників, 100 постачальників швидкість підрахунку 1.5 с).
Інтерфейс даної СППР простий та зручний у використанні. Застосована можливість ведення даних як вручну, так і з файлу. Також виводяться часові характеристики виконання алгоритму та кінцеві транспортні витрати. Виведення результатів структуроване та зрозуміле. Для інформативності користувача програма містить підказки та попередження про неправильність введених даних. Можливим недоліком даної СППР може бути те, що вона призначена для роботи виключно із цілочисельними даними.
Шляхи покращення програми:
-
Розширення можливостей роботи програми із нецілими даними
-
Додавання нових методів для пошуку оптимального розв’язку задачі.