

29. Індукційні механізми аналогових вимірювальних приладів. Переваги, недоліки.
Такі вимірювальні механізми (див. рис. 6.6) використовується переважно в лічильниках електричної енергії, в колах змінного струму. Вимірювальний механізм цієї системи має два незалежні магнітопроводи, рознесені в просторі. Обмотка одного з магнітопроводів є обмоткою кола напруги, обмотка другого магнітопроводу є струмовою. Потоки Фн та Ф, пропорційні відповідно напрузі Uта струмуI, наводять у диску вихрові струми. В результаті взаємодії цих вихрових струмів і магнітних потоків виникає обертовий момент,
Mоб=kfФмФіsinφ, 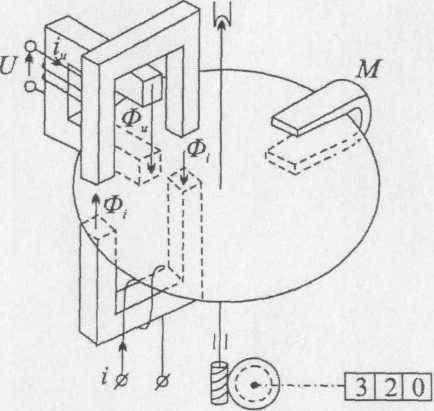 Рис.
Схематичне зображення індукційного
вимірювального механізму
Рис.
Схематичне зображення індукційного
вимірювального механізму
де k- сталий коефіцієнт, значення якого визначається параметрами ВМ; f - частота струму та напруги; φ- кут зсуву фаз між потоками ФмтаФі
30. Електромагнітні механізми аналогових вимірювальних приладів. Переваги, недоліки.
В
основі принципу дії електромагнітних
вимірювальних механізмів покладено
принцип, за яким на феромагнітне тіло
в
магнітному полі діє сила, пропорційна
квадрату магнітної індукції. Магнітна
індукція, в свою чергу, створюється
струмом, що протікає через котушку
вимірювального механізму, а 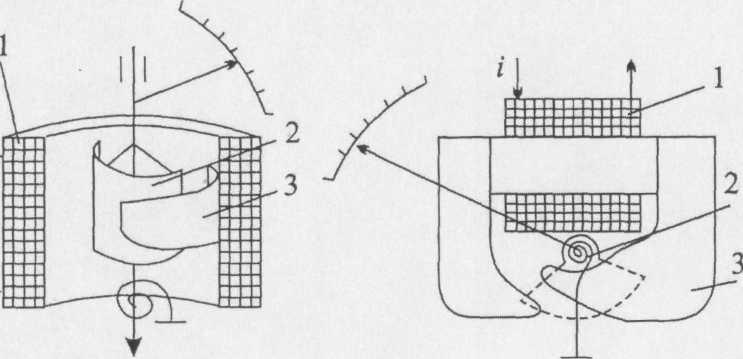 отже,
обертальний момент, що виникає,
пропорційний квадрату цього струму.
отже,
обертальний момент, що виникає,
пропорційний квадрату цього струму.
Рис. 6.7 Схематичне зображення електромагнітного вимірювального механізму
а) з круглою котушкою; б) з плоскою котушкою
У вимірювальних механізмах сучасних електромагнітних приладів обертальний момент створюється силою відштовхування між однаково намагніченими рухомим та нерухомим осердями в результаті проходження через вимірювальну котушку 1 струму.
Переваги електромагнітних ВМ є: — можливість вимірювати як постійні так і змінні струми, стійкість до струмових перевантажень, простота конструкції і невелика вартість.
Недоліки електромагнітних ВМ є: низька чутливість і точність, значне енергоспоживання.
31. Електростатичні механізми аналогових вимірювальних приладів. Переваги, недоліки.
Обертальний момент електростатичних приладів (рис. 6.8) пропорційний квадрату напруги між рухомим 1 та нерухомими 2 електродами, а усталене відхилення рухомої частини буде пропорційним ефективному (середньоквадратичному) значенню напруги:
![]()
Для створення необхідного для нормальної роботи обертального моменту в електростатичних вимірювальних механізмах потрібна порівняно висока напруга. Тому електростатичні прилади випускають як вольтметри з номінальною напругою не нижче ніж 10В і як кіловольтметри переважно до 30 кВ. Схематичне зображення вимірювального механізму подано на рисунку 6.8.
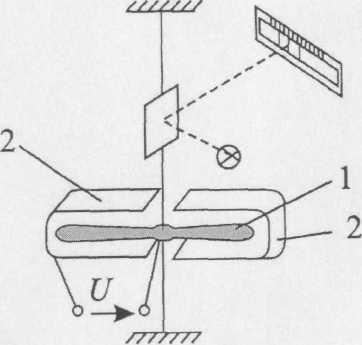
Рис. 6.8 Схематичне зображення електростатичного вимірювального механізму Переваги електростатичних ВМ є: можливість використання як для вимірювання постійного струму, так і змінного, мале енергоспоживання,незалежність показів від частоти, форми вимірювальної напруги і зовнішніх магнітних полів, великий діапазон вимірювання напруги (до декількох сотень кіловат).
Недоліки електростатичних ВМ є: мала чутливість.
Область застосування: електростатичні вольтметри в колах постійного та змінного струму високих частот з напругою до сотень кіловольт.